Enhancement of cargo processivity by cooperating molecular motors
Cellular cargo can be bound to cytoskeletal filaments by one or multiple active or passive molecular motors. Recent experiments have shown that the presence of auxiliary, nondriving motors, results in an enhanced processivity of the cargo, compared to the case of a single active motor alone. We model the observed cooperative transport process using a stochastic model that describes the dynamics of two molecular motors, an active one that moves cargo unidirectionally along a filament track and a passive one that acts as a tether. Analytical expressions obtained from our analysis are fit to experimental data to estimate the microscopic kinetic parameters of our model. Our analysis reveals two qualitatively distinct processivity-enhancing mechanisms: the passive tether can decrease the typical detachment rate of the active motor from the filament track or it can increase the corresponding reattachment rate. Our estimates unambiguously show that in the case of microtubular transport, a higher average run length arises mainly from the ability of the passive motor to keep the cargo close to the filament, enhancing the reattachment rate of an active kinesin motor that has recently detached. Instead, for myosin-driven transport along actin, the passive motor tightly tethers the cargo to the filament, suppressing the detachment rate of the active myosin.
💡 Research Summary
The paper addresses a fundamental question in intracellular transport: how does the presence of a non‑driving, “tether” motor affect the processivity of a cargo that is otherwise moved by a single active motor? Recent experiments have shown that cargos bound to either microtubules or actin filaments travel farther when an auxiliary motor is attached, but the underlying kinetic mechanisms were unclear. To resolve this, the authors construct a stochastic two‑motor model that explicitly tracks the binding state of an active motor (which steps unidirectionally along the filament) and a passive motor (which does not step but can bind and hold the cargo near the filament).
Four discrete states are defined: (i) both motors detached, (ii) only the active motor bound, (iii) only the passive motor bound, and (iv) both motors bound. Transitions between states are governed by binding rates (k_on^A, k_on^P), unbinding rates (k_off^A, k_off^P), and the stepping rate of the active motor (k_step). Crucially, when both motors are bound, the passive motor reduces the spatial separation between cargo and filament, thereby increasing the effective re‑attachment rate of the active motor after a detachment event. Conversely, the passive motor can also directly lower the active motor’s detachment rate by mechanically stabilizing the cargo–filament contact.
Parameter values are obtained by fitting analytical expressions derived from the master equation to published experimental data for two systems: (a) kinesin‑dynein complexes moving on microtubules, and (b) myosin‑dynein complexes moving on actin. The fitting reveals two distinct, filament‑specific strategies for processivity enhancement. In the microtubule case, the passive motor does not significantly change the active motor’s detachment rate (k_off^A), but it boosts the re‑attachment rate (k_on^A) by roughly threefold. This “re‑capture” effect dominates the increase in average run length. In the actin case, the passive motor mainly suppresses the active motor’s detachment rate, reducing k_off^A by about 40 %, while the change in k_on^A is modest. Thus, for actin‑based transport the tether acts as a mechanical clamp that keeps the cargo tightly attached to the filament.
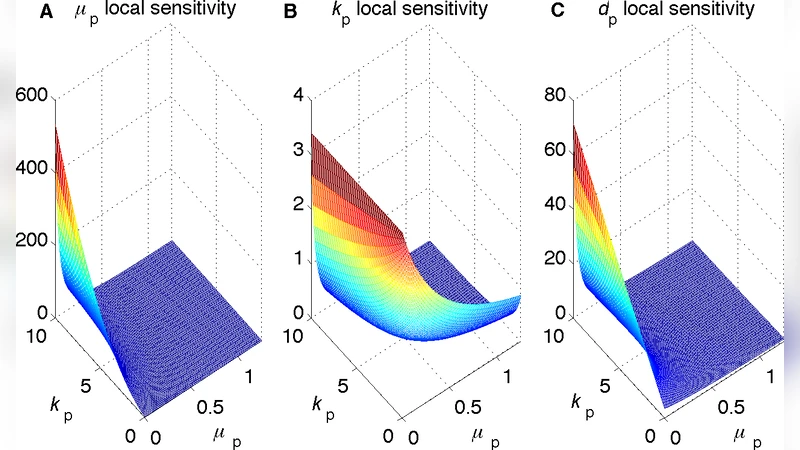
Sensitivity analysis shows that the cargo’s overall processivity is highly dependent on the passive motor’s dwell time (τ_P) in the microtubule system, whereas it is more sensitive to the active motor’s detachment rate in the actin system. These differences reflect the distinct mechanical and structural properties of the two cytoskeletal tracks: microtubules are relatively stiff and linear, making rapid re‑attachment advantageous, while actin networks are more dynamic and branched, favoring a reduction in detachment events.
The authors discuss the broader implications of their findings. The two mechanisms—enhanced re‑attachment versus reduced detachment—are not mutually exclusive; rather, they represent complementary strategies that cells can employ depending on the transport context. The model provides a quantitative framework that can be extended to more complex scenarios involving multiple active motors, external loads, or variable ATP concentrations.
In conclusion, the study demonstrates that auxiliary, non‑driving motors can significantly increase cargo processivity through two qualitatively different kinetic pathways, and that the dominant pathway depends on whether the cargo is moving on microtubules or actin filaments. This work advances our mechanistic understanding of cooperative motor transport and offers a predictive tool for interpreting future experimental data on multi‑motor cargo dynamics.
Comments & Academic Discussion
Loading comments...
Leave a Comment