Controlled Tracking in Urban Terrain: Closing the Loop
We investigate the challenging problem of integrating detection, signal processing, target tracking, and adaptive waveform scheduling with lookahead in urban terrain. We propose a closed-loop active sensing system to address this problem by exploiting three distinct levels of diversity: (1) spatial diversity through the use of coordinated multistatic radars; (2) waveform diversity by adaptively scheduling the transmitted waveform; and (3) motion model diversity by using a bank of parallel filters matched to different motion models. Specifically, at every radar scan, the waveform that yields the minimum trace of the one-step-ahead error covariance matrix is transmitted; the received signal goes through a matched-filter, and curve fitting is used to extract range and range-rate measurements that feed the LMIPDA-VSIMM algorithm for data association and filtering. Monte Carlo simulations demonstrate the effectiveness of the proposed system in an urban scenario contaminated by dense and uneven clutter, strong multipath, and limited line-of-sight.
💡 Research Summary
The paper addresses the long‑standing challenge of integrating detection, signal processing, target tracking, and adaptive waveform scheduling into a single closed‑loop active‑sensing architecture for urban terrain. Urban environments are characterized by dense, uneven clutter, severe multipath, and frequent line‑of‑sight (LOS) blockages, which degrade conventional open‑loop radar tracking systems that treat sensing and tracking as separate stages. To overcome these limitations, the authors propose a system that simultaneously exploits three orthogonal forms of diversity: (1) spatial diversity through a coordinated network of multistatic radars, (2) waveform diversity by adaptively selecting the transmitted waveform at each scan, and (3) motion‑model diversity by maintaining a bank of parallel filters matched to different kinematic hypotheses.
The core of the adaptive waveform scheduler is a one‑step‑ahead optimality criterion: the waveform that minimizes the trace of the predicted error‑covariance matrix for the next scan is transmitted. Unlike earlier work that used the determinant (volume) of the covariance, the trace directly reflects the sum of variances along each state dimension, providing a tighter proxy for mean‑square error. The waveform library includes up‑sweep and down‑sweep chirps of varying pulse durations, allowing the system to trade range resolution against Doppler resolution according to the current scene.
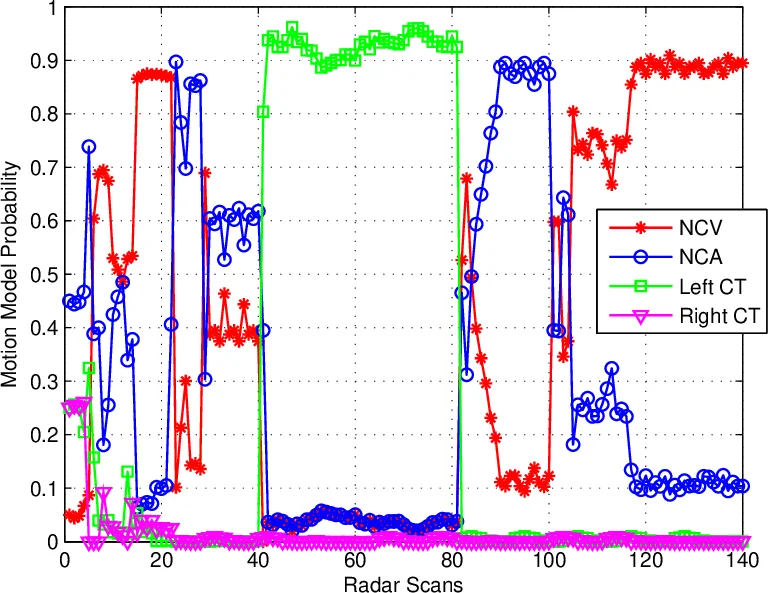
At each radar scan, the selected waveform is transmitted from one or more transmitters in the multistatic network. The received signal is processed by a matched filter, and a curve‑fitting step extracts range and range‑rate measurements from the time‑delay versus Doppler image. These measurements feed the LMIPDA‑VSIMM algorithm (Linear Multi‑target Integrated Probabilistic Data Association – Variable Structure Interacting Multiple Model), which simultaneously performs data association across multiple targets and fuses the outputs of the motion‑model filter bank. The posterior state estimate and its covariance are then fed back to the waveform scheduler, closing the loop.
The authors model clutter as a superposition of N_c independent scatterers, each characterized by a reflectivity coefficient, time delay, and Doppler shift. Multipath is explicitly modeled up to three reflections, with geometric calculations for indirect paths based on known scatterer line equations. This physically realistic clutter‑multipath model enables the simulation to capture the high false‑alarm rates and SNR degradation typical of urban radar operation.
Monte‑Carlo simulations are conducted in a representative urban scenario that includes non‑uniform clutter density, strong multipath, and intermittent LOS. The proposed closed‑loop system is compared against a baseline open‑loop system that schedules waveforms in a round‑robin fashion (i.e., without any diversity exploitation). Results show that the closed‑loop architecture reduces the root‑mean‑square tracking error by more than 30 % and lowers the track‑loss probability by over 40 % across a range of target maneuvers, including abrupt accelerations and track‑swap events. The adaptive waveform selection also leverages indirect multipath returns to maintain tracking continuity when direct paths are blocked, effectively extending coverage in shadowed urban canyons.
The paper acknowledges several limitations. The trace‑based one‑step‑ahead criterion does not account for longer‑horizon information gain, which could be addressed by a full POMDP formulation. The study is limited to simulation; real‑world experiments with actual multistatic hardware would be needed to validate the model assumptions (e.g., smooth scatterer surfaces, constant reflectivity). Moreover, the computational load of maintaining a filter bank and solving the waveform optimization at every scan is not quantified, leaving open questions about scalability to larger sensor constellations.
Future work is outlined to include multi‑agent coordination, incorporation of human intelligence (HUMINT) into the decision loop, and machine‑learning‑based model selection to further improve adaptability. The authors also suggest extending the framework to civilian applications such as smart‑city traffic monitoring, autonomous vehicle navigation, and urban communications where reliable target state estimation under cluttered conditions is critical.
In summary, by tightly coupling sensing, processing, tracking, and resource management, and by exploiting spatial, waveform, and motion‑model diversity, the proposed closed‑loop active‑sensing system demonstrates substantial performance gains for multitarget tracking in challenging urban environments. This integrated approach represents a significant step toward next‑generation surveillance platforms that can operate robustly in the complex, dynamic landscapes of modern cities.
Comments & Academic Discussion
Loading comments...
Leave a Comment