Reconstructing a convex polygon from its $omega$-cloud
An $\omega$-wedge is the closed set of points contained between two rays that are emanating from a single point (the apex), and are separated by an angle $\omega < \pi$. Given a convex polygon $P$, we place the $\omega$-wedge such that $P$ is inside the wedge and both rays are tangent to $P$. The set of apex positions of all such placements of the $\omega$-wedge is called the $\omega$-cloud of $P$. We investigate reconstructing a polygon $P$ from its $\omega$-cloud. Previous work on reconstructing $P$ from probes with the $\omega$-wedge required knowledge of the points of tangency between $P$ and the two rays of the $\omega$-wedge in addition to the location of the apex. Here we consider the setting where the maximal $\omega$-cloud alone is given. We give two conditions under which it uniquely defines $P$: (i) when $\omega < \pi$ is fixed/given, or (ii) when what is known is that $\omega < \pi/2$. We show that if neither of these two conditions hold, then $P$ may not be unique. We show that, when the uniqueness conditions hold, the polygon $P$ can be reconstructed in $O(n)$ time with $O(1)$ working space in addition to the input, where $n$ is the number of arcs in the input $\omega$-cloud.
💡 Research Summary
This paper addresses the problem of reconstructing a convex polygon P using only its “ω-cloud,” a curve representing the set of all possible apex positions of a minimal enclosing ω-wedge. An ω-wedge is the region between two rays emanating from a single point (the apex) with a fixed angle ω (< π). A minimal ω-wedge for P contains P and has both rays tangent to it. The ω-cloud is the locus of apexes of all such minimal wedges as they rotate around P.
The main contribution is establishing conditions under which the ω-cloud alone uniquely determines the original polygon P, and providing an efficient reconstruction algorithm under those conditions. The authors prove that uniqueness is guaranteed in two cases: (i) when the angle ω is fixed and known (with ω < π), or (ii) when it is only known that ω < π/2. They show that if neither condition holds, different polygons can share the same ω-cloud. When uniqueness is guaranteed, they present an algorithm that reconstructs P in O(n) time using O(1) extra working space, where n is the number of circular arcs composing the input ω-cloud.
The technical core of the paper involves a deep analysis of the geometric properties of the ω-cloud. The cloud consists of a sequence of circular arcs. The points where consecutive arcs meet are called pivots. A pivot corresponds to a vertex of P if and only if that vertex’s internal angle is at most ω; such vertices/pivots are termed “narrow.” Key lemmas characterize the relationship between angular distances along the cloud and the directions of the corresponding minimal wedges (Lemma 1). A crucial formula (Corollary 1) shows that the total angular measure of all arcs in the cloud is 2(2π - Σ(ω - α(v))), where the sum is over all narrow vertices v of P, linking the cloud’s global structure directly to the polygon’s geometry.
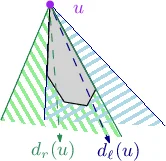
The reconstruction algorithm hinges on identifying narrow pivots, which are the polygon’s vertices. Lemmas 3 and 4 provide the necessary criteria for this identification using only information available from the cloud: the angular distances between certain special points and the supporting circles of the arcs. Specifically, for a point x on the cloud, one can define a point x_r based on the right arm direction of its wedge. Lemma 3 states that if the angular distance D_Ω(x, x_r) equals 2(π - ω), then x is a candidate narrow pivot. Lemma 4 further refines this: if all arcs within an angular distance of 2(π - ω) from a pivot u have supporting circles passing through u, then u is indeed a narrow pivot (a vertex).
The algorithm traverses the circular arc sequence of the ω-cloud. It applies these lemmas to detect narrow pivots, effectively recovering the vertices of P in their cyclic order. Connecting these vertices in sequence yields the reconstructed polygon. The process is linear because each arc is examined a constant number of times.
This work significantly advances geometric probing theory. It proves that the ω-cloud is a more powerful tool than the diameter function (where uniqueness fails), as no two distinct convex polygons can have the same non-constant ω-cloud. It generalizes prior results to the full range 0 < ω < π and demonstrates that a simplified probe signature—just the apex locations—can be sufficient for efficient and unique reconstruction.
Comments & Academic Discussion
Loading comments...
Leave a Comment