Data-driven approximations of dynamical systems operators for control
The Koopman and Perron Frobenius transport operators are fundamentally changing how we approach dynamical systems, providing linear representations for even strongly nonlinear dynamics. Although there is tremendous potential benefit of such a linear representation for estimation and control, transport operators are infinite-dimensional, making them difficult to work with numerically. Obtaining low-dimensional matrix approximations of these operators is paramount for applications, and the dynamic mode decomposition has quickly become a standard numerical algorithm to approximate the Koopman operator. Related methods have seen rapid development, due to a combination of an increasing abundance of data and the extensibility of DMD based on its simple framing in terms of linear algebra. In this chapter, we review key innovations in the data-driven characterization of transport operators for control, providing a high-level and unified perspective. We emphasize important recent developments around sparsity and control, and discuss emerging methods in big data and machine learning.
💡 Research Summary
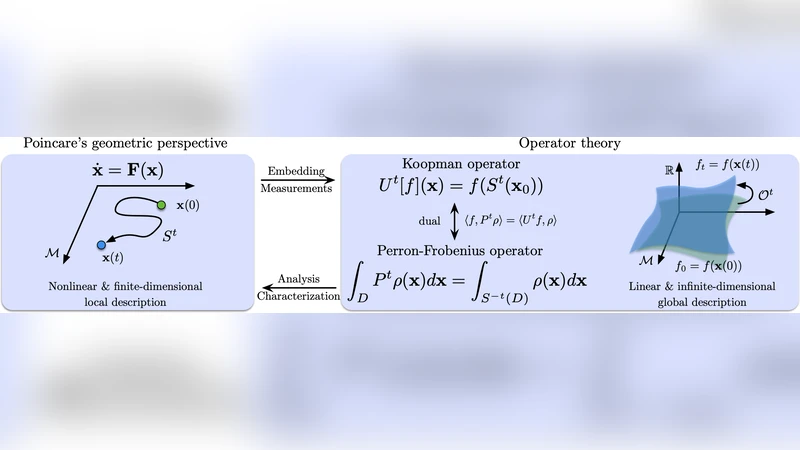
This chapter provides a comprehensive review of recent advances in data‑driven approximations of Koopman and Perron‑Frobenius (PF) operators for the purpose of controlling nonlinear dynamical systems. The authors begin by introducing the theoretical foundations of the two infinite‑dimensional linear operators. The Koopman operator advances observable functions in the space L∞(X) and possesses eigenfunctions that evolve exponentially in time, offering a globally linear representation of the underlying nonlinear flow. The PF operator, dual to Koopman, propagates probability densities in L¹(X) via the Liouville equation, and its eigenfunctions encode invariant measures, metastable sets, and mixing properties.
Because these operators are infinite‑dimensional, practical use requires low‑dimensional matrix approximations. The chapter surveys the family of Dynamic Mode Decomposition (DMD) techniques that form the backbone of such approximations. Classical DMD computes a best‑fit linear map A from snapshot pairs (X, X′). Extensions such as Extended DMD (EDMD), Kernel DMD, and Deep DMD enrich the observable space with nonlinear basis functions, kernels, or neural networks, respectively, enabling more accurate representations of complex dynamics. Sparse Identification of Nonlinear Dynamics (SINDy) and its control‑aware variant SINDy‑c are highlighted as methods that select a parsimonious set of candidate functions, thereby producing interpretable models while incorporating control inputs.
The authors then formulate the optimal control problem for a general nonlinear system with state dynamics ẋ = F(x, u) and output y = H(x, u). By embedding the nonlinear system into a Koopman‑generated linear state‑space (ż = Az + Bu), classical linear control tools become applicable. Linear Quadratic Regulator (LQR), State‑Dependent Riccati Equation (SDRE), and Model Predictive Control (MPC) are discussed as concrete design strategies that exploit the linear surrogate. In the PF framework, control is interpreted as steering the probability density toward a desired invariant measure, leading to stochastic‑optimal formulations that minimize a cost on the density evolution.
A substantial portion of the chapter is devoted to observability, controllability, and state estimation within the operator‑theoretic setting. The choice of Koopman eigenfunctions directly influences the observability matrix, while the structure of the PF transition matrix informs Bayesian filtering approaches. The authors emphasize that sparsity‑promoting regularization, random projection, and GPU‑accelerated training are essential for handling the massive datasets now common in fluid dynamics, robotics, and power systems.
The review also outlines current challenges: (1) accurate extraction of Koopman eigenfunctions remains difficult, leading to model uncertainty; (2) online adaptation of operator approximations for time‑varying systems is still nascent; (3) rigorous stability and convergence guarantees for the approximated operators are lacking. To address these, the authors point to emerging research on adaptive DMD, Bayesian inference for operator uncertainty, physics‑informed neural networks that embed conservation laws, and new mathematical tools linking spectral properties of operators to classical control concepts.
In conclusion, the chapter argues that data‑driven Koopman and PF operator approximations open a pathway to apply powerful linear control theory to highly nonlinear, high‑dimensional systems. Future work will focus on integrating adaptive, probabilistic, and physics‑aware learning frameworks to improve robustness, scalability, and theoretical rigor, thereby expanding the practical impact of operator‑theoretic control across engineering domains.
Comments & Academic Discussion
Loading comments...
Leave a Comment