Survivable Networks via UAV Swarms Guided by Decentralized Real-Time Evolutionary Computation
The survivable network concept refers to contexts where the wireless communication between ground agents needs to be maintained as much as possible at all times, regardless of any adverse conditions that may arise. In this paper we propose a nature-inspired approach to survivable networks, in which we bring together swarm intelligence and evolutionary computation. We use an on-line real-time Genetic Algorithm to optimize the movements of an UAV swarm towards maintaining communication between the ground agents. The proposed approach models the ground agents and the UAVs as boids-based swarms, and optimizes the movement of the UAVs using different instances of the GA running independently on each UAV. The UAV coordination mechanism is an implicit one, embedded in the fitness function of the Genetic Algorithm instances. The behaviors of the individual UAVs emerge into an aggregated optimization of the overall network survivability. The results show that the proposed approach is able to maintain satisfactory network survivability levels regardless of the ground agents’ movements, including for cases as complex as random walks.
💡 Research Summary
The paper addresses the problem of maintaining continuous wireless connectivity among a large number of ground agents by employing a swarm of unmanned aerial vehicles (UAVs) as mobile relays. The authors propose a novel, fully decentralized framework that combines a boids‑based swarm model with an on‑line, real‑time Genetic Algorithm (GA) running independently on each UAV. Both ground agents and UAVs are modeled as flocking boids, but the UAVs use a network‑centric definition of neighborhood (agents within communication range) and an additional external force that pulls them toward ground agents. The UAVs’ motion update follows the classic three‑force formulation (cohesion, alignment, separation) weighted by parameters (W_c, W_a, W_s). These weights are the decision variables of the GA.
Each UAV maintains its own GA population, initialized randomly, and evolves the weight vector every few simulation steps. The fitness function is primarily a coverage metric: the number of ground agents that fall inside the UAV’s communication radius. A small penalty term discourages collisions and excessive speed. By maximizing individual coverage, UAVs implicitly cooperate: they spread out to cover as many ground nodes as possible, which in turn reduces the number of disconnected components in the overall ground network. Connectivity—defined as the number of graph components, with the ideal value of one—is used as the principal performance indicator in the experiments.
The methodology is deliberately lightweight. Only a few genes (the three force weights) are optimized, allowing the GA to converge within 20–30 generations and execute in under 30 ms per UAV on a standard CPU, satisfying real‑time constraints. The authors also emphasize scalability: because the number of decision variables does not depend on the swarm size, the approach scales to hundreds of ground agents and multiple UAVs without a significant computational burden.
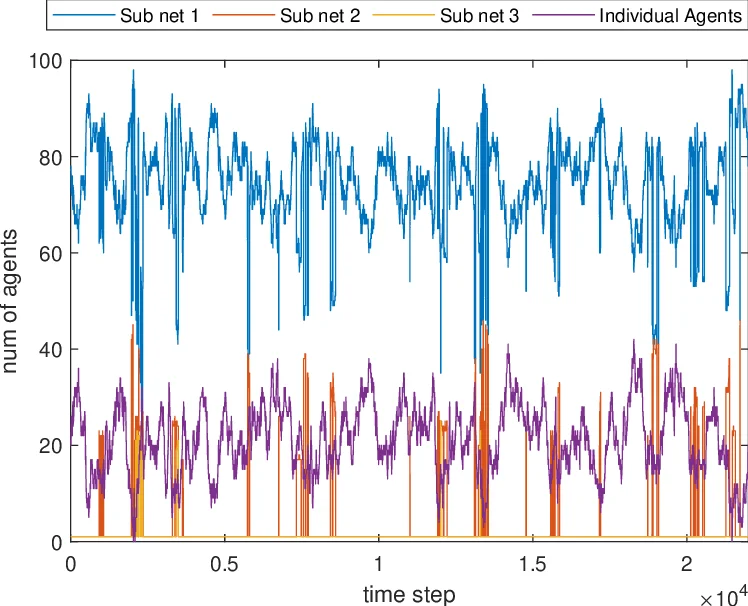
Experiments are conducted in a 2‑D simulation environment with no obstacles. Two scenarios are examined: (1) ground agents follow the classic boids rules (vision‑based cohesion, alignment, separation) and (2) ground agents perform pure random walks, representing the most unpredictable movement pattern. In both cases, a swarm of four UAVs is tasked with maintaining connectivity among 100 ground agents. Results show that the average number of connected components stays close to one (connectivity > 0.85) in both scenarios, with near‑perfect connectivity (> 0.95) when ground agents exhibit coherent flocking behavior. In the random‑walk case, occasional temporary partitions occur, but the on‑line GA quickly readjusts the UAV weights, restoring connectivity within a few seconds.
The paper situates its contribution within a broad body of related work. Earlier approaches relied on fixed or mobile ground relays, high‑altitude platforms, or centralized optimization techniques that are unsuitable for dynamic, large‑scale deployments. Prior UAV mobility studies have used random, chaotic, or parameter‑tuned models, and some have applied evolutionary algorithms offline or in a centralized fashion. The authors argue that their decentralized GA overcomes the latency and scalability issues of those methods. They also compare GA to Particle Swarm Optimization (PSO), noting that while PSO can be faster, the GA’s ability to evolve discrete weight vectors makes it more appropriate for the discrete decision space of boids forces.
Limitations are acknowledged. The boids model abstracts away real flight dynamics, energy consumption, wind, and communication latency, which could affect performance in real deployments. Moreover, the fitness function focuses solely on coverage and does not directly incorporate Quality‑of‑Service metrics such as bandwidth, latency, or packet loss. The authors suggest future work to integrate more realistic physics, multi‑objective optimization (including energy and QoS), and hardware‑in‑the‑loop experiments with actual UAV platforms.
In conclusion, the study demonstrates that a simple, real‑time GA combined with a boids‑based mobility model can effectively steer a UAV swarm to preserve network survivability under highly dynamic ground‑agent movements. The implicit coordination emerging from individual coverage maximization provides a scalable, low‑overhead solution that could be extended to larger swarms and more complex operational environments.
Comments & Academic Discussion
Loading comments...
Leave a Comment