Tie-Line Characteristics based Partitioning for Distributed Optimization of Power Systems
The convergence performance of distributed optimization algorithms is of significant importance to solve optimal power flow (OPF) in a distributed fashion. In this paper, we aim to provide some insights on how to partition a power system to achieve a…
Authors: Ali Mohammadi, Mahdi Mehrtash, Amin Kargarian
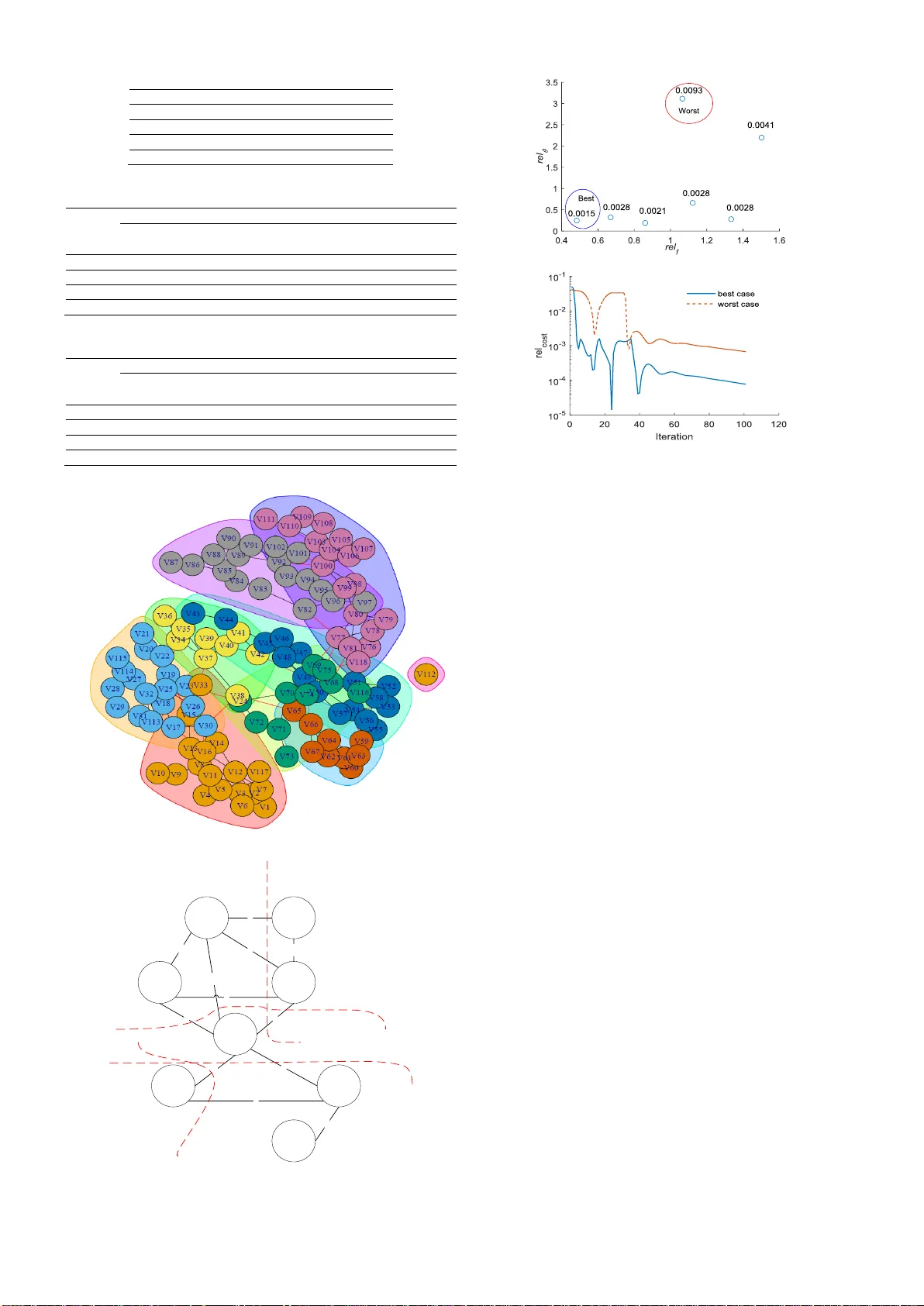
1 Abstract — The convergence performance of distributed optimization algorithms is of sig nificant importance to sol ve optimal p ower flow (OPF) in a distr ibuted fashion. In t his paper, we aim to provide some insights on how to partition a power system to a chieve a high convergence rate o f distri buted algorithms for the solution of an OPF problem. We analyzed several features of the po wer network to find a set of suitable partitions with the aim of converg ence performance improvement. We model the grid as a graph and decompose it based o n the edge betw eenness graph clustering. This technique provides several partitions. To f ind an effective partitioning, w e merge the partitions obtained by clusterin g technique and analyze them based on characteristics of tie-lines connecting neighboring partitions. The main goal is to find the best set of partitions w ith respect to the convergence speed. We deploy analytical target cascading (ATC) method to distributedly solve optimization subproblems. W e test the proposed algorith m o n the IEEE 118-bus system. The results show that the algorithm converges faster with a proper partitioning, w hereas improper partitioning leads to a large number of iterations. Index Terms — Edge B etweenness clustering , decentralize d algorithm, Feature extraction, optimal power flow. I. I NTRODUCTI ON MPLEMENTAT ION of distributed o ptimization algorithms is an al ternative to the conventional centralized methods for power systems operation and planning[1 ] . This is incentivized by two main reasons, 1) information privacy in smart grids, and 2) distributing the computatio nal burden on several processo rs. Moreover, distributed/ decentralized algorit hms potentially increase power systems reliability a gainst failures of c omponents o r co mmunication links. Various distributed a nd decentralized opti mization algorithms have been proposed in the literature to solve power system opti mization problems. Refe rences[2] . provide a co mprehensive literature revie w on th e distributed/decentralized opti mization algorithms and their applications on po wer systems. The m ain f o cus of t his paper is on optimal p ower flo w (OPF) that is a critical energy management function in a pow er system. Alter nating direction m ethod of multipli ers (ADMM)[ 3, 4], auxiliary problem principle (APP) [4] [5], optimality condition decomposition (OCD) [6], consensus+innovation [7], and analytical target ca scading (ATC) [8] are among the popular methods to solve OPF in a distributed/decentralized fashion. These methods co ordinate a s et o f local OPF subproblems each of which i s formulated for an area of the s ystem. If the areas are known (based o n the territory of a control entity), the coo rdination al gorithms are ap plied to coordinate the local OPF problems. Ho wever, if the goal is to reduce the computational burden of the centralized OPF taking advantage of a distributed computing technique, the power system need to be d ecomposed into several s mall zo nes[ 9] . Then, a coordination strategy is applied to coordinate optimization subprob lems of the zones. The way that the system is decomposed into a set of zones has a significa nt i mpact o n the co nvergence per formance of the distributed op timization[10] . One app roach is to p artition the system to equal su bsyste ms to benefit from the par allel computing. Se veral techniques, such as tab leau[11], genetic algorithm[12] , dyn amic progra mming [13], and harmony search[14], have bee n presented to p artition the system to a set of equal-sized subsystems. A lt hough having equal -sized subproble ms balances the computational cost of processors, it might increa se the req uired iterations to ach ieve the convergence. This, consequently, increase s the overall computational time. Finding a proper partitioning that leads to a h igh convergence rate and accuracy is d ifficult. I ndeed, not only the computational co st of each su bproble m is important but also interdependencies of the subproblems and sensitivity of a zone to its ne i ghboring zo nes p la y a critical ro le in the converg en ce rate and number r equired iteratio ns. A pro per parti ti oning depends on the system co nfiguration, the number of buses in each z one, the nu mber of tie -lines in terconnecting the zones, t he amount of power exc h an ged between the ne ighboring zones, the amount of load in each zone, etc. In this p aper, we analyze t he impact of po w er syste m partitioning on the distributed OP F algorithm. We also provide some insights on how to find prop er partitions to speed up the convergence rate and reduce the number of iterations o f the distributed OP F algor ithm. T he grid is modeled as a graph ( bus es act as nodes and lines are edges ) and implement the edge b etweenness g raph clustering to decompose the s ystem i nto a set of zones. We partition the system in a way that each zone includes a subset o f nodes and edges that are strongly connected. The 118 -bus test system is partitioned in the d ifferent ways. We anal yze se veral poss ible p artitioning fo rms based o n features o f tie - lines interconnecting the zones and t he convergence speed. Correlations between tie- lin es’ characteristics and the convergence speed ar e studied to provide so me useful insights on po wer system decomposition. II. S YSTEM D ECOMPOSI TION WI T H E DGE -B ETWEENN ESS To d ecompose the system into several subproble ms, we use the op timal values from the centralize d opti mization. Then, the impact of different partitioning for ms is investigated on t he distributed algorithm. A. The Classical Centralized DCOP F For the sake of explanatio n and simplicit y , a DCOP F problem is consider ed. T ie-Line Characteristics based Partitioning for Distributed Optimization of Power System s A. Mohamm adi , Student Member, I EEE, M. Mehrt ash, Student Membe r, IEEE , A. Karg ar ian, Member, IEEE , and M. Barati, Member, IEEE I This p roject was supported by the Louisia n a Board of Regents under grant LEQS F (2016- 19) - RD -A - 10 . The authors are with the departme n t of Electric al and Comp uter Engineering, L ouisiana State University , Baton Rouge, LA 7 0803 USA (email: amoha39@lsu.edu, mmehrt3@lsu.edu, kargarian@lsu.edu , mbarati@lsu.e d u.) 2 . where , and are the cost co efficients of g e nerator unit and and denotes the am ount of generatio n and load o f bus . is to tal number of ge nerator. denote a bus voltage a ngle. an d are sets of equality a nd inequality constra ints. indicates t he amount of power flow between bus and . is the set of indices of buses that are co nnected to bus . B. Interconnecting OPF Outputs to System Graph To find the p roper partitions, we r un the centralized DCOPF once to obtain the system inf ormation. W e consider the grid as a grap h mod el i n which bu ses are considered as nodes and li nes as ed ges ( we intercha ngeably use the terms “node” and “ b us” throu ghout the paper ; similarly for “line” and edge”) . Weights of t he edges ar e needed to constr uct the graph. Th ree ap proaches can be selected . First, if t wo nodes are connected v ia a transmission line, the w eight of the corresponding edge between these two nodes is one, else it is zero. Second, to assign the priority to each co nnection , the weight of each edge is defined based on the reactance o f the corresponding tr ansmission line as . This is a good approach to segregate the strong and week connectivity between lines, while the impact of load s and generation are neglected. I n the thir d ap proach, we define t he weights according to line flo ws. A line with a large amount of flow, which may pla y a crucial role in the s ystem, has more priority than a line with low flow . W e select t he third approach to d efine the weights of the edges. Since th e amount of line flows may vary in a wide range, we normalize the w eights by dividing them b y the minimum line flow . This gives a more proper weight for a line. C. Partitioning by Edge B etweenness Many appr oaches can b e deployed t o partition the g raph in variou s w ays. O ur goal in the decentralized optimization is to decompose the DCOP F problem in to a set of subproble ms each f o r a partition . It is desirable that the subproble ms are weakly connec t ed . In other words , a region (subproblem) should be co nnected to other regions with a minimum n u mber of tie -lines . In ad dition, th e weights o f tie- lines need to be considered to account for their importance . The edge betweenness algorithm is matched with our purpose. In this algorithm, inspires from vertex betweenness[15] , the co mmunities are detected based on the edges t hat are most ly between them. T he centrality o f a n o de 1 Note t hat, in th i s paper, w e a im to stu d y the impact of grid partitioning. Without loss of generality, we deploy ATC to coordinate OPF subproblems. and the impact of each node on the network are measured . To d istinguish which ed ges a re most between other nodes , the vertex betweenness is generalized. T he edge betweenness for o ne ed ge is defined as t he number o f shortest paths b etween two nodes. If there is m o re than o ne minimal path between t wo vertices, an eq ual weight is assign ed to each path wh ile the total weight of all paths must be equal to one. Co nsider two communities, each of which is s trongly connected (locally), w hereas they have few inter - group ed ges, and all of the paths pass through these inter gr oup edges. In this c ase, w e have a high edge betweenness connection, and most flows go along these inter-group ed ges. By re moving t hese ed ges, the net work is decomposed into two s maller networks . For instance, in Fig. 1, w e deter mine the edge betweenness f or a graph. The connected ed ge between nod es 4 and 5 has the maximum edge betweenness si nce a flow fro m nodes 1- 4 need to pass edge 4 -5 to reach nodes 5-8. This edge act as the b ridge between the two subsets. To cl ar ify m ore how this algorith m works the ps eudocode for an unweighted graph is sho wn below: Algorithm of Edge- Betweenness 1: while N partitions not obtained 2: Find all shortest paths b etween each pair o f nodes 3 : Divide shortest paths weights by that is number of shortest paths for each pair of nodes 4: Remove the edge with t he highest bet weenness 5: Recalculate the edge bet weenness, go to step 2 6: end w hile Fig. 1 . E dge betwee n ness procedure. D. C ons truct a Set o f Similar Clusters Several partitions are o btained b y imple menting the edge betweenness graph clustering on the po wer network. T he number of regions and coupli ng variables (i.e., the number of tie -lines) i mpact t he distributed op timization. T o hav e f air analysis and discussions, w e m erge the clusters obtained from t he partitioning method in different ways to construct a set of n e w partitions in which the number of regions and tie- lines would be the sa me. III. ATC C OORDINATION S TRATEG Y We implement t he analytical target ca scading (ATC) method to solve the OP F problems of t he partition s in a distributed manner 1 . ATC works based on the concep t o f augmented Lagrangian rela xation and coord inates the Howeve r, one can use other distribute d optimization algor i thms, such as APP and AD M M instead of A TC. 3 subproble ms sequentiall y. Subproblems are placed at different hierarchical levels . A subproblem in an upper level ( ) act s as a p arent for the connected subpro blems in the lower level , while children in t he lower le vel are not linked [16]. A parent is li nked to its children through a set of shared variables, which are voltage angles of t he buses placed at the boundar ies of the partition s in the co nsidered DC OPF problem. ATC iteratively solves the OPF problems of the partitions (one problem at a time) and updates the shared variable s to achieve a feasible and o ptimal sol ution from the perspective of the whole grid. A. ATC Formulation We b riefly explain the ATC method (see [16] for more details) . Assume a compact form of the centralized OPF as follows: where is the set o f all v ar iables (i.e., and ) of the system. is the objective function (see (1)) . and are the sets of equality ( see (2) and (3)) and in equality ( see (4) and (5)) co nstraints . T he opti mization ca n be rewritten as follows with respect to the local OPF subproble ms of the partitions and their shared variables: where subscript denotes subpro blem in level , is the set of local variab le of subpro blem in level . is the set of s hared variables (we call th em targe t variable s) defined in subproblem in level . The tar get variables are determined by a parent and send down to ward the corresponding children. is t he set o f s ubproblems in level , and is the number o f subproblem s in level , and denotes the number of levels . To separ ate the par en ts’ and children’s subp roblems , a response copier is introduced for each targte variab le . T he response variables ar e duplication of the targets. T argets and responses are shared variables betw een parents and children . The targets are co ntrolled by parent, while the responses ar e handled w ith c hildren. To enforce the decentralize a lgorithm to co nverge to the optimal ( and f easib le) point, the follo wing set of consistenc y constraint must be satisfied: where is the consis tancy constriants of subpro ble m in level . To relax the hard consistency con straints , t he concept of augmented La grangian relaxation i s deployed and a set of penalty functions are added to each subprob lem’s objective function. We can rewrite t he objective fun ction (9) as: subject to ( 10 ) and ( 11 ). denot es the penalty term added to subp roblem in level . Several options exist to model the p enalty ter ms, s uch as expo nential and quadratic functions. With the above procedure, the p artitions ar e placed in diff erent leve ls and their OPF subprob lems are separated. B. AL- AD Coordination Strategy Several algorithms can be de ployed to co ordinate the OPF subpr oblems. In this paper, we select a second -order penalty ter m and follow t he al ternating directio n method o f multipliers (AL -AD) coordination strate gy[3]: where and are penalty multip liers and “ ” denotes t he Hadamard p roduct. In the D C OP F, the tar get and resp onse variables are the voltage angles o f terminals of tie -lines that connect the p artitions. For the sake o f simplicit y and explanation, we co nsider tw o partitions, and p ut partition 1 in level 1 and p artition 2 in level 2. In each iteration of A L - AD (it is an iterative procedure), OP F subproblem 1 in level 1 (i.e., the par ent partition) is: where denotes the target variables o f the parent, and is the respo nse variable s of th e child. And the OP F subprob lem 2 in level 2 (i.e., the child par tition) is: Note that is co nstant in ( 16 ), wherase is constant in ( 15 ). The AL - AD ‘s steps are as follows: Step1 : Initialize local variables of each subp roblem, target values , response , pe nalty multipliers and , and parameter , and set the iteration inde x . Step2 : Solve OP F subprob lems in level , and update the target values. Solve subpro blems in level , u pdate response (for levels ) and target (for leve ls ) values. Do that until all le vels are solved. Step3: If , w here is a stopping threshold , the co nvergence is a chieved . Other wise, and update the penalty multipliers as follows: and then go to Step 2 . We refer to [16] more de tails on the ATC method a nd the AL - AD co ordination strateg y. IV. N UMERICAL R ESULTS AN D D ISCUSSIONS The edge betw ee nness partitioning method is implemented on t he IEE E 11 8-bus s ystem, a nd the simulation resu lts are discussed . W e explain how t he test system is decomposed in to different clusters. We extract features of each cluster to under stand which clu ster is m or e efficient. T he AL - AD co ordination strateg y is solved to analyze the accuracy of the clustering framew ork. T o have a fair analysis and com p arison, th e convergence cr iterion and initial points are the same in all cases. All si mulations are 4 carried out using R and MAT LAB, on a perso nal 2.7 GHz computer with 16 GB RAM. A. Decomposing 118 -Bus System To partition th e test system, the centralized DC OPF problem is solved to determine the line flows. Based o n our experience, w e cluster the system to eigh t zones. Figure 2 (a ) shows the nodes in each zone . Fo r the sake of analysis and discussions and to hav e a fair comparison bet ween the par titi ons, we co mbine the p ar ti tions in differe nt ways to create two zones that are connected through three tie-lines. We find four ca ses a nd, in Fig. 2 (b), show ho w clusters are connected. The weight of each edge d enotes the number of tie -lines between t wo c lusters. Each o f the dash -line separates t he graph in to two parts ( e.g., {3,5 } are in the first group, and {1,2,4 ,6,7,8} ar e in the second group). The four cases are given in T able I. B. Tie -line Features We find the edges placed between the clusters and define them a s b ridges. B y re moving the brid ges, t he clusters ar e completely isolated. Since each bridge is placed in a different part of the po w er grid and ha s different rea ctance, they have different features. We d efine two indies to characterize the features of each bridge. T he first index is t he bus volta ge an gles variations. T his inde x i ndicates that i f we c hange the voltage angles of t wo side s of a bridge, how other angles change. T his meas ures the impor tance of each bridge. If the impact of this variation is high, it means that th is bridge it is not a proper tie -lines, as a small change in this tie -line has a high i mpact on the r est of the system, and the distributed algorithm p ut more ef forts to find the opti mal point for bo th sides of this tie -line. T o calculate this index, we solve the problem in a centralized manner . Kno wing the optimal angles, we increase /decrease the two sides of the bridge b y 0.1%. We then solve the pro blem again to ob serve variations of the voltage angles in th e r est of t he system. The angle variation is for mulated as : where denotes the voltage angle o f bus w hen t he angles of the brid ge terminals var y . is the optimal value for the angle of b us . The second inde x measures t he impact o f a bridge o n the cost function. The proce dure of calculat ion of the co st variation is the same as of . T his index measures ho w much the cost function vary. where and are respectively the cost of generation unit after the angle modification and before that (i.e., the optimal angles) . Note that in the four par titioning s hown in Ta ble I , the tw o zone s are connected via four tie-lines. W e add the defined indices of each tile-line to find two equivalent indices . T o analyze the impact of power d emand, w e examine three tests with the normal load, 7 5% of the nor mal load ( low load), and 125 % of the nor mal load (high load). T o provide a b etter sense, we nor malize t he result by dividing them by their average value. T he results are shown in Tab les II. C. Impact o f Partitioning on Distributed Algo rithm AL - AD is applied to find D COPF solution o f the four possible pa rtitioning cases under different loading conditions . To have a fair condition for all cases, the initial value for targets and responses ar e set to zer o. The stopping criterion is , and . The initial value s for multipliers are , . A ll ca ses co nverge after 10 0 iterations. We define two indices, to eva luate our results. The first index is the relative dista nce o f the total cost deter mined by centralized OP F and the decentralized one. where and ar e the optimal co st function obtain ed by th e centralized and decentralized OPF. The s econd in d ex, shows the average of over the co urse of iterations . I n several iterations , is precise but the performance of AL - AD in its p revious iterat ions is not good. Hence, we formulate the as where is the valu e of the objective function of the distributed algorithm in iteration . Table III shows the results of the four possible pa r ti tioning forms. The results demonstrate that a case w ith small and w ould lead to a better result. However, the im p act of is h i gher than . We use a f uzzy logic to assign one value i nstead o f using both and [1 7]. If w e co nsider Case 2 in the normal load, the and indices a re less in co mparison with ot her ca ses. The result s prov e that Case 2 has proper values in comparison w it h t he three other cases. On the other hand, for Case 1 in the norma l lo ad is the w or st . Thus , we expect that thi s case would b e the wor st case. To investigate the effect of and the our results, we select various amount of load as {0.6, 0.7, 0.8 , 0.9, 1, 1.1, 1.2}, and test Case 2. T he features of ea ch partion are extracted and nor malized (divide b y the mean val ue). The results are ploted in Fi g. 3 (a) based on and , and the amount of is depicted at each point. The result shows that t he point with an small val ue of a d has the least er ror, while the worst ca se has and . In Fi g. 4 (b) , for the w ors t and b es t ca ses are drawn (logarit mic) over the course o f iterations. V. C ONCLUSION I n this paper, we st udied the impact of po wer gri d partitioning on the distributed OPF. We deployed the e dg e betweenness partitionin g ap proach to deco mpose the system. Several po ssible par titioning for ms could be sel ected. The main concern is “ which partitioning f orm i s suitable for the decentralized OPF algorithm? ” We intr oduced several indices obtained fro m feat ures of the t ie -lines connecting the partitions to analyze t he resul ts of distributed OPF of each partitioning ca se. The simulation re sults on the 118 -bus system showed that each partitioning case provides different convergence perfor mance. A partitioning case with the least variation indices is po tentially the best case fro m the pe rspective o f t he decentralized algorithm, i.e., AL - AD shows a go od convergence p erformance for s uch a case. 5 TABLE I. SUBSETS OF EACH CAS E Case ID subsets 1 {35}, {1 2 4 6 7 8} 2 {6}, {1 2 3 4 5 7 8} 3 {4 6 8}, {1 2 3 5 7} 4 {2 4 6 8}, {1 3 5 7} T ABLE II. FEATURES OF EACH C LUSTER Case No Normal lo ad Low load High load 1 0.9052 2.0833 0.7854 0.3779 1.2733 2.7536 2 0.4491 0.1164 2.9915 1.03 50 1.1451 0.2144 3 0.3793 0.3591 0.2108 2.3676 0.0620 0.0581 4 2.2664 1.4411 0.0121 0.2192 1.5193 0.9737 T ABLE III. ERROR OF EACH CLUSTER Case No Normal lo ad Low load High load 1 3.2 7.1 0.09 2.8 5.4 8 2 0.07 1.5 1.21 3.0 1.35 3.2 3 0.01 3.2 0.01 3.4 0.004 3.1 4 0.02 7.5 0.007 7 0.22 8.3 (a) 1 3 7 5 2 4 6 8 1 5 1 1 1 1 1 3 3 1 4 2 (b) Fig. 2.a) nodes cl u stering and b) me rge cluster s. (a) (b) Fig. 3. a) Impact of a n d o n decentralized algorithm b ) o ver the course of iterations. R EFERENCE [1] A. Kargarian, Y. F u, S. DorMohammadi , and M. Ra i s-Rohani, "Optimal operation of active distribution grids: A syste m of sy stems framewo rk," IEEE Transactions on Smart Grid, vol. 5, pp. 1 2 28-1237, 2014. [2] D. I. Sun, B. Ashley , B. Brewer, A. Hughes, and W. F. Tinney , "Optimal p ower flow by Ne wton approach," IEEE Trans actions on Power Apparatus and systems, pp. 2864-2880, 1984. [3] S. T osserams, L . Etman, P. Papalambro s, and J. R ooda, "A n a ugmented Lagrangian relaxation for analytical target cascading using the alternating direction method of multiplier s," Structural and multidisciplinary optimiza tion, vol. 31, pp. 176-189, 2 006. [4] S. Boyd, N. Parik h , E. C hu, B. Pe leat o, and J . Eckstein, "Distri buted optimization and statistical learning via the alternating direction method of mu ltiplier s," F o undations and Trends® in Machine Le arning, vo l. 3, pp. 1-122, 2011. [5] J. Guo, O. Tonguz, and G. Hug, " I mpact of power system partitioning on t he efficiency of di stributed multi-step optimizatio n," in PowerT ech, 2017 IEEE Ma nchester , 2017, p p. 1- 6. [6] A. J. C onejo, F. J. No gales, a nd F. J. Prieto, "A decomposition procedure based on a pproximate Newton directions," Mat hematical programming , vol . 93, p p. 495-515, 2002. [7] S. Kar, G. Hug, J. Mohamma di , and J. M. Mo ura, "Distributed St at e Estimation and Energy Management in Smart Grids: A Consensus ${+} $ Innovations Approach," IEEE Journal of Selected To p ics in Signal Processing, vol. 8, pp. 1022-1038, 2 014. [8] H. M. Kim, D. G . Rideout, P. Y. Papalambros, and J. L . Stein, "Analy tical target cascading in automotive vehicle design," Journal of mechanical des ign, vol. 125, pp. 48 1 -489, 20 03. [9] Y. Zheng, I. Lee, and N. Serban, "Var iable Partitionin g for Distri buted Optimization," arXi v preprint arXiv:1710.0899 4 , 2017. [10] J. Guo, G. Hug, and O. K. Tonguz, "I ntelligent partitioning in distributed optimiza t ion of el ectric p ow er s ystems," IEEE Transactions on Smart Grid, vol. 7 , pp. 1249-12 5 8, 2016. [ 11] A. Sangiovanni-Vincentelli, L.-K. Chen, and L. Chua, "An efficient heuristic cluster algo rit hm for tearing larg e-scale networks," IEEE Transactions on C i rcuits a nd Systems, vol. 24, pp. 709- 7 17, 1977. [12] H. D ing, A . El-Keib, and R. S mith, "Optimal clustering o f pow e r networ ks using genetic algorithms," Electric P o wer Systems R esearch, vol. 30, pp. 209-2 14, 1994. [13] J. Undrill and H. Ha pp, "Automatic sectionalization of power system networ ks for network solutions," IEEE Transactions on Power Apparatus and Syst ems, pp. 46-53, 1 971. [14] G. A. Ezhilarasi and K. Swarup, "Network partitioning using harmony search and e q uivalencing for distributed computing," Jour nal o f Parallel and Distr ibuted Computing, vol. 72, pp. 9 3 6-943, 2012. [15] M. Girvan and M . E. Newman, "Comm unity structure in social and biological networks," Pr o ceedings of the national academy o f s c iences, vol. 99, pp. 7821- 7826, 2002. [16] A. Kargarian, J. Mohammadi , J. Guo, S. Chakrabarti, M. Barati, G. Hug , et a l. , "Toward distributed/decentralize d DC optimal power flow implementatio n in future electric power syste ms," IEEE Tra n sactions on Smart Grid, 2016.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment