Predictability of the imitative learning trajectories
The fitness landscape metaphor plays a central role on the modeling of optimizing principles in many research fields, ranging from evolutionary biology, where it was first introduced, to management research. Here we consider the ensemble of trajectories of the imitative learning search, in which agents exchange information on their fitness and imitate the fittest agent in the population aiming at reaching the global maximum of the fitness landscape. We assess the degree to which the starting and ending points determine the learning trajectories using two measures, namely, the predictability that yields the probability that two randomly chosen trajectories are the same, and the mean path divergence that gauges the dissimilarity between two learning trajectories. We find that the predictability is greater in rugged landscapes than in smooth ones. The mean path divergence, however, is strongly affected by the search parameters – population size and imitation propensity – that obliterate the influence of the underlying landscape. The learning trajectories become more deterministic, in the sense that there are fewer distinct trajectories and those trajectories are more similar to each other, with increasing population size and imitation propensity. In addition, we find that the roughness of the learning trajectories, which measures the deviation from additivity of the fitness function, is always greater than the roughness estimated over the entire fitness landscape.
💡 Research Summary
This paper investigates the predictability of learning trajectories generated by an imitative search on NK‑type fitness landscapes. The authors use the NK model with binary strings of length N = 12 and vary the epistatic parameter K (0, 2, 4, 11) to create landscapes ranging from smooth (additive) to highly rugged. A population of M agents explores the landscape in parallel. At each discrete time step the agent with the highest fitness (the “model” agent) is identified. Every other agent either (i) flips a randomly chosen bit with probability 1 − p, or (ii) imitates the model by copying one randomly selected differing bit with probability p. If an agent is already identical to the model, it performs a random flip. The search terminates when any agent reaches the global maximum; at that moment the model agent is the optimum.
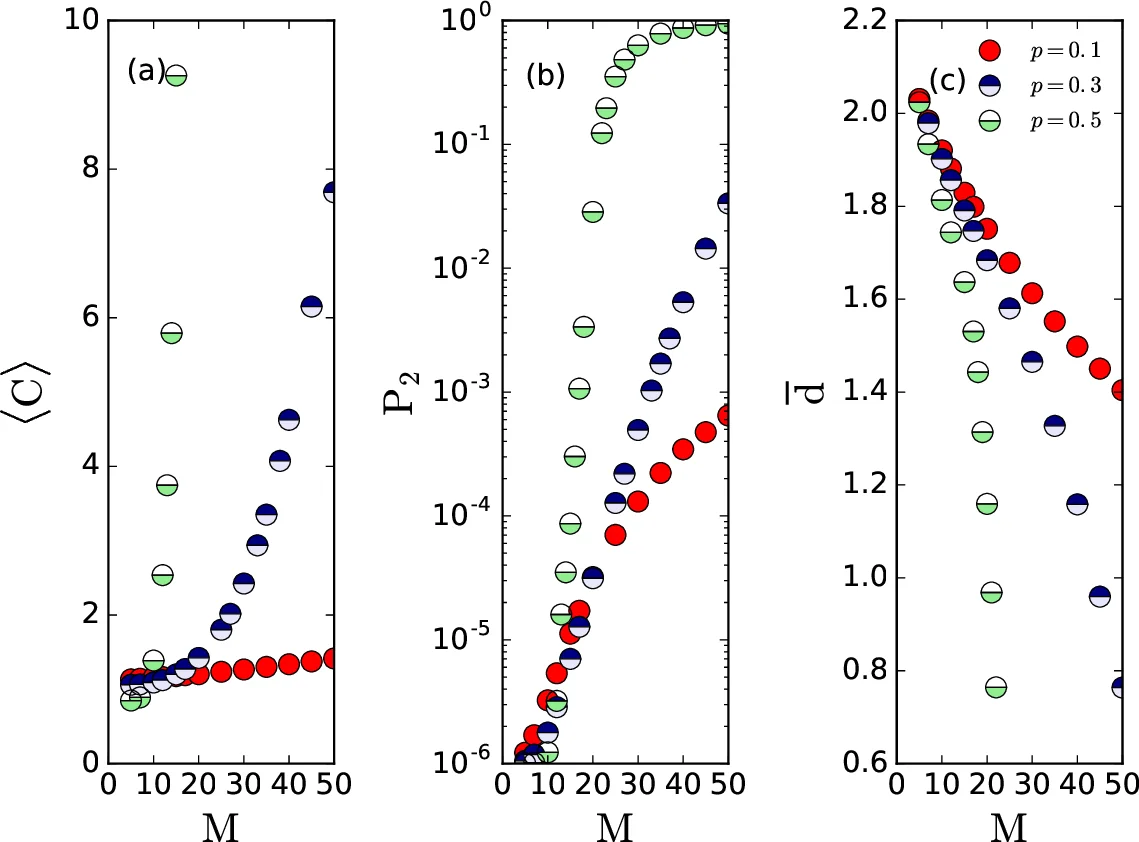
Two quantitative measures are introduced to characterize the ensemble of learning trajectories (the ordered sequence of model‑agent states from the start to the optimum). Predictability (P) is defined as the probability that two trajectories, drawn at random from the ensemble, are exactly identical. Mean path divergence (D) is the average Hamming‑distance‑based dissimilarity between two randomly chosen trajectories. In addition, the authors define a “roughness” ρ for a single trajectory as the root‑mean‑square deviation between the actual fitness values along the trajectory and a purely additive fitness approximation built from the global optimum and the signs of the differing bits. The global roughness ρ̂ is obtained by averaging ρ over the entire state space.
Simulation results reveal several systematic patterns. First, increasing K (i.e., making the landscape more rugged) raises predictability P. Rugged landscapes contain many local maxima that act as attractors; consequently, independent runs tend to be funneled into the same sequence of attractors, producing identical trajectories more often. Second, the mean path divergence D is largely insensitive to K but is strongly affected by the search parameters p (imitation propensity) and M (population size). Larger populations increase the influence of the model agent, causing the whole group to synchronize more quickly; higher imitation propensity similarly forces agents to follow the model’s path. Both effects reduce D, making the ensemble of trajectories more homogeneous. Thus, while landscape ruggedness determines how deterministic the search is in principle, the actual diversity of trajectories is governed primarily by the social learning parameters.
The roughness analysis shows that trajectory roughness ρ is always greater than the landscape‑wide average ρ̂, indicating that the imitative dynamics preferentially explore regions where non‑additive epistatic interactions are pronounced. Moreover, ρ grows monotonically with both M and p, reflecting that stronger imitation drives the population into deeper local basins where the additive approximation breaks down. In the limit M → ∞, ρ converges to a well‑defined value corresponding to the maximally rough trajectory attainable on the given landscape.
The authors discuss methodological constraints: the study uses a relatively low dimensionality (N = 12) and a single random realization for each K value, because storing and comparing the full set of possible trajectories becomes computationally prohibitive for larger N. They note that predictability is especially sensitive to dimensionality, as identical trajectories become exponentially unlikely in high‑dimensional spaces. Nonetheless, the qualitative trends observed are consistent with earlier work on evolutionary predictability in biological systems.
In the concluding section the paper highlights two main insights. (1) Ruggedness of the underlying fitness landscape enhances the intrinsic predictability of the search, echoing findings from evolutionary biology that adaptive walks on rugged landscapes are more deterministic. (2) The social learning parameters—population size and imitation propensity—override landscape effects in shaping the actual diversity and roughness of learning trajectories. This suggests that, in organizational or collective decision‑making contexts, the degree of conformity (how strongly agents copy a high‑performing exemplar) and the size of the group are critical levers for controlling both the efficiency of reaching optimal solutions and the variability of the paths taken. The authors propose future extensions, including larger N, heterogeneous imitation propensities, asynchronous updates, and multiple landscape realizations, to further elucidate the interplay between landscape topology and social learning dynamics.
Comments & Academic Discussion
Loading comments...
Leave a Comment