The algorithm of the impulse noise filtration in images based on an algorithm of community detection in graphs
This article suggests an algorithm of impulse noise filtration, based on the community detection in graphs. The image is representing as non-oriented weighted graph. Each pixel of an image is corresponding to a vertex of the graph. Community detection algorithm is running on the given graph. Assumed that communities that contain only one pixel are corresponding to noised pixels of an image. Suggested method was tested with help of computer experiment. This experiment was conducted on grayscale, and on colored images, on artificial images and on photos. It is shown that the suggested method is better than median filter by 20% regardless of noise percent. Higher efficiency is justified by the fact that most of filters are changing all of image pixels, but suggested method is finding and restoring only noised pixels. The dependence of the effectiveness of the proposed method on the percentage of noise in the image is shown.
💡 Research Summary
**
The paper introduces a novel impulse‑noise (salt‑and‑pepper) removal method that leverages community detection in graphs. The authors first model a digital image as an undirected weighted graph: each pixel becomes a vertex, and edges connect the eight spatial neighbours. Edge weights are defined by an exponential function of the Euclidean distance between the RGB colour vectors of the two connected pixels, with a user‑defined parameter h controlling colour sensitivity.
Community detection is performed using Newman’s modularity Q. The key insight is that a pixel belonging to a “singleton” community (a community consisting of a single vertex) indicates that the pixel is an outlier relative to its neighbours and is therefore likely corrupted by impulse noise. For each pixel v, the algorithm examines the eight possible merges with its neighbours v(i). The modularity change for each potential merge is computed analytically as ΔQ = 2(e_ij − a_i a_j), where e_ij is the normalized edge weight and a_i, a_j are the reduced degrees of the two vertices. If all ΔQ values are negative, the pixel is marked as noisy. This computation requires only local information and runs in O(1) per neighbour, giving the whole detection phase linear complexity O(N × M) for an N × M image.
After noisy pixels are identified, colour restoration proceeds by examining the colour range of the eight neighbours. Let m₁ and m₂ be the minimum and maximum colour component values among the neighbours. The algorithm scans all integer colour values between m₁ and m₂, temporarily assigning each candidate colour to the noisy pixel and recomputing ΔQ. The colour that yields the maximum ΔQ is selected as the restored value. This approach favours colour assignments that improve the overall modularity, thereby preserving local colour consistency and avoiding the blurring typical of median‑based filters.
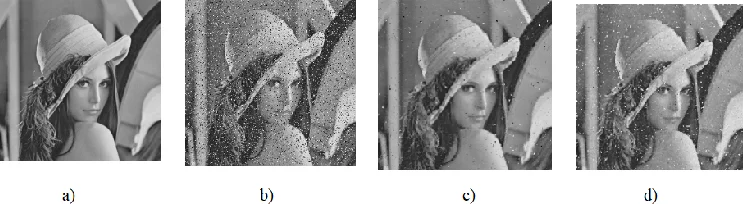
The method was evaluated on synthetic geometric images and real photographs (including the standard “Lena” image) with impulse‑noise levels ranging from 10 % to 70 %. Reconstruction quality was measured using a Minkowski‑based distance metric and a relative improvement ratio δ = (d(original, noisy) − d(original, restored)) / d(original, noisy) × 100 %. Across all test cases, the proposed algorithm achieved roughly 20 % higher δ values than a conventional median filter. Visual inspection confirmed that edges and fine details, especially in dark regions, were better preserved, while the median filter tended to shift colours toward brighter values in light areas.
The authors highlight three main advantages: (1) selective processing of only the identified noisy pixels prevents unnecessary smoothing of undamaged regions; (2) modularity‑driven detection incorporates global colour structure, leading to higher detection accuracy than purely local window‑based methods; (3) the algorithm’s linear time complexity makes it suitable for real‑time or large‑scale image processing.
Limitations include the need to manually set the sensitivity parameter h and the implicit modularity threshold for singleton detection, which may require adaptation for images with highly heterogeneous colour distributions. Future work could explore adaptive parameter selection, integration with multi‑scale graph constructions, or hybridization with deep‑learning‑based denoising frameworks. Overall, the paper contributes a compelling graph‑theoretic perspective to impulse‑noise removal, demonstrating measurable gains over classic median filtering while maintaining computational efficiency.
Comments & Academic Discussion
Loading comments...
Leave a Comment