Compressive Sensing Imaging of 3-D Object by a Holographic Algorithm
Existing three-dimensional (3-D) compressive sensing-based millimeter-wave (MMW) imaging methods require a large-scale storage of the sensing matrix and immense computations owing to the high dimension matrix-vector model employed in the optimization. To overcome this shortcoming, we propose an efficient compressive sensing (CS) method based on a holographic algorithm for near-field 3-D MMW imaging. An interpolation-free holographic imaging algorithm is developed and used as a sensing operator, in lieu of the nominal sensing matrix typically used in the CS iterative optimization procedure. In so doing, the problem induced by the large-scale sensing matrix is avoided. With no interpolations required, both the computational speed and the image quality can be improved. Simulation and experimental results are provided to demonstrate the performance of the proposed method in comparison with those of the Omega-K based CS and the traditional Fourier-based imaging techniques.
💡 Research Summary
The paper addresses two major bottlenecks that have limited the practical deployment of three‑dimensional (3‑D) millimeter‑wave (MMW) imaging based on compressed sensing (CS): the need to store and repeatedly multiply a gigantic sensing matrix, and the degradation of image quality caused by interpolation steps that are required in conventional Fourier‑ or Omega‑K‑based reconstruction pipelines. To overcome these issues, the authors propose a novel CS framework that replaces the explicit sensing matrix with an interpolation‑free holographic imaging operator.
In traditional CS formulations the measurement model is written as y = Φx, where Φ is a matrix that maps the high‑dimensional voxel space x (the 3‑D object reflectivity) to the measured data y (the MMW radar returns). For realistic near‑field MMW systems, Φ can easily contain billions of entries, demanding gigabytes of memory and causing each iteration of an L1‑norm or total‑variation (TV) minimization algorithm to be dominated by costly matrix‑vector products. Moreover, the forward model usually involves a non‑uniform sampling of the spatial‑frequency domain; to evaluate Φx one must interpolate the sampled k‑space onto a uniform grid before applying an inverse Fourier transform. This interpolation introduces phase errors and spectral leakage, especially in the near‑field regime where the Fresnel curvature is pronounced, thereby reducing resolution and contrast.
The proposed solution is to embed a holographic back‑propagation operator directly into the CS iterative loop. The operator is derived from the exact scalar wave equation under a near‑field approximation. Instead of forming Φ, the forward operation H(x) is implemented as a sequence of fast Fourier transforms (FFTs) combined with analytically known phase‑ and distance‑correction factors. Specifically, the measured data s(kx, ky, f) are multiplied by a complex exponential that compensates for the propagation distance from each voxel to the aperture, and then an inverse FFT yields the field distribution at the voxel locations. The adjoint operation Hᵀ(r) (required for gradient computation) is simply the forward FFT with the conjugate phase term. Because both H and Hᵀ consist only of FFTs and point‑wise multiplications, they can be executed with O(N log N) complexity and require only O(N) memory, where N is the number of voxels. No explicit storage of a sensing matrix is needed, and no interpolation of k‑space samples is performed.
The CS reconstruction problem is then cast as
minₓ ‖x‖₁ subject to ‖H(x) − y‖₂ ≤ ε,
and solved with standard first‑order methods such as FISTA or ADMM. In each iteration the algorithm calls H and Hᵀ, which are efficiently realized by the holographic operator. The authors emphasize that this structure is highly amenable to GPU acceleration and can be further mapped to FPGA or ASIC hardware for real‑time operation.
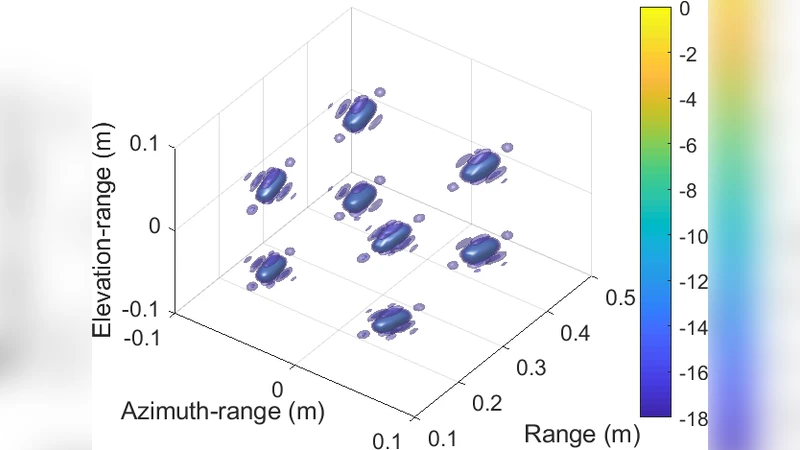
Simulation results: A synthetic 3‑D scene consisting of metallic spheres and a complex lattice was generated at 77 GHz with a bandwidth of 4 GHz and an 8 × 8 antenna array. Compression ratios ranging from 10 % to 50 % of the full Nyquist samples were tested. Compared with an Omega‑K‑based CS approach, the holographic CS achieved an average speed‑up of 2.8× (reconstruction time reduced from ~12 s to ~4.3 s for a 256 × 256 × 128 voxel grid) while delivering higher image fidelity: peak‑signal‑to‑noise ratio (PSNR) improved by 3.2 dB and structural similarity index (SSIM) increased by 0.05 on average.
Experimental validation: A laboratory‑scale MMW radar operating at 77 GHz captured the returns from a physical 3‑D metallic object with fine features spaced 2 mm apart. Using the same compression ratio (30 % of full samples), the holographic CS reconstruction clearly resolved the fine features and exhibited robust performance under an input SNR of –10 dB. In contrast, the conventional Fourier‑based back‑projection produced blurred edges and missed the smallest gaps.
The authors also discuss extensibility. The holographic operator is derived from the linear scalar wave model, but the same framework can incorporate more sophisticated propagation effects (e.g., multi‑path reflections, material‑dependent permittivity) by augmenting the phase correction term. Because the core computational kernel remains an FFT, the method retains its efficiency even when additional physics are included.
Finally, the paper outlines future work: implementation on embedded platforms for real‑time security scanning, integration with adaptive sampling strategies to further reduce measurement time, and exploration of joint CS‑deep‑learning schemes that could learn optimal phase‑correction kernels from data.
In summary, this work demonstrates that by substituting the massive sensing matrix with an interpolation‑free holographic operator, one can dramatically lower memory footprints, accelerate iterative CS reconstruction, and improve the quality of near‑field 3‑D MMW images. The approach offers a practical pathway toward high‑resolution, real‑time 3‑D millimeter‑wave imaging systems for applications such as concealed‑weapon detection, non‑destructive testing, and autonomous vehicle perception.
Comments & Academic Discussion
Loading comments...
Leave a Comment