Governance in Adaptive Normative Multiagent Systems for the Internet of Smart Things: Challenges and Future Directions
The rapidly changing environments in which companies operate to support the Internet of Things (IoT) and Autonomous Vehicles is challenging traditional Multi agent System (MAS) approaches. The requirements of these highly dynamic environments gave rise to Adaptive Normative MAS approaches. At the same time, governance is an essential and challenging feature that still needs to be addressed in adaptive normative MAS. Indeed, governance of individual and societal agent behavior in Adaptive Normative MASs is still a vague concept that has not been properly investigated, modeled and implemented. However, governance is fundamental for solving problems involving MAS coordination, organizations and institutions. In this paper, we present our ongoing research towards understanding and improving governance in Adaptive Normative MASs. We also discuss challenges and future directions that will facilitate the development of domain specific smart IoT systems with governance features.
💡 Research Summary
The paper addresses a pressing gap in the design of multi‑agent systems (MAS) for highly dynamic domains such as the Internet of Things (IoT) and autonomous vehicles (AV). Traditional MAS research has largely focused on coordination, norms, and individual agent goals, but it has not systematically incorporated the higher‑level constructs of governance—namely coordination, organization, institution, and norm—into a unified modeling framework. The authors argue that without a governance layer, adaptive normative MAS cannot reliably manage the complexity, openness, heterogeneity, and scalability required by modern smart‑thing ecosystems.
The authors first review related work, noting that existing studies either concentrate on specific governance mechanisms (e.g., multi‑level governance, institutional design) or on particular smart‑thing applications (e.g., traffic lights, autonomous cars) but rarely combine both. Moreover, most meta‑modeling languages (e.g., FAML, JSAN) lack constructs for representing governance concepts at runtime, limiting their ability to support dynamic adaptation.
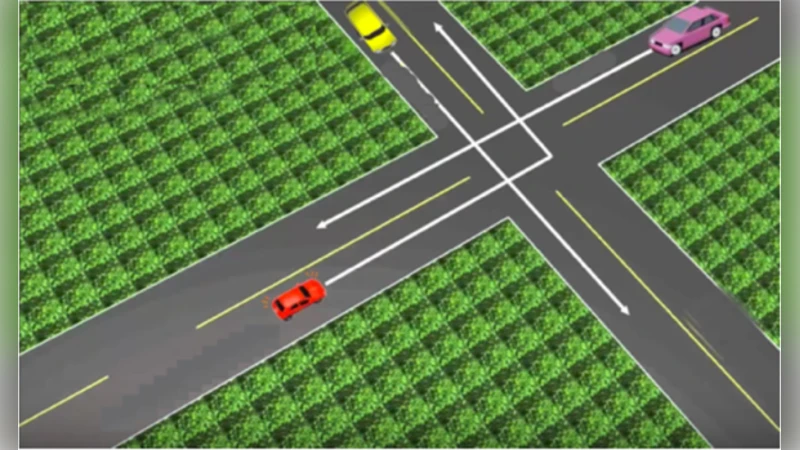
To illustrate the need for governance‑aware adaptive normative MAS, the paper presents a detailed case study of intelligent intersections in Brazil. Brazilian traffic law (Articles 29 and 38 of the Brazilian Transit Code) defines three right‑of‑way norms: (1) vehicles on main roads have priority, (2) circulating vehicles in a roundabout have priority, and (3) in all other cases, vehicles coming from the right have priority. The authors simulate a scenario where three autonomous vehicles (pink, yellow, red) arrive simultaneously at an unsignaled intersection. Each vehicle adopts a distinct governance strategy: the pink car follows a “pressure” strategy (complies with norms to achieve its goal while minimizing penalties), the yellow car adopts a “rebellious” strategy (ignores norms to maximize its own objective), and the red car uses a “social” strategy (first complies, then seeks to satisfy individual goals if possible). Using the JSAN framework, the agents reason about the applicable norms, discover that Article 29 cannot resolve the conflict, and fall back on Article 38. The simulation shows how the chosen strategies lead to a resolution where the rebellious yellow vehicle proceeds while the other two yield, highlighting the interplay between normative compliance, strategic behavior, and governance mechanisms.
From this example the authors extract several key challenges: (i) the lack of an integrated meta‑model that simultaneously captures norms, coordination, organization, and institutions; (ii) insufficient runtime support for dynamic adaptation of governance constructs; (iii) the absence of a standardized simulation infrastructure for evaluating governance‑oriented adaptive MAS; (iv) difficulty in quantifying the impact of different governance strategies on system safety and efficiency; and (v) the need for domain‑specific validation (e.g., smart traffic lights, AVs).
To address these challenges, the authors outline a research agenda consisting of: (1) a systematic review of existing meta‑models, architectures, languages, and frameworks to identify gaps; (2) the design and extension of a unified meta‑model that incorporates governance elements; (3) the development of an architectural blueprint and supporting infrastructure for simulating governance in adaptive normative MAS; (4) rigorous evaluation of the proposed meta‑model and architecture through comparative experiments; (5) the creation of domain‑specific use cases (smart intersections, traffic signal control, autonomous vehicle coordination) to demonstrate applicability; and (6) the incorporation of a testimony‑based penalty mechanism, whereby agents that violate governance rules are punished based on reports from peer agents, thereby reinforcing compliance.
In conclusion, the paper presents an ongoing effort to embed governance into adaptive normative MAS, using a realistic traffic intersection scenario to motivate the need for richer modeling constructs. The authors propose a concrete path forward—meta‑model extension, architecture definition, simulation infrastructure, and domain validation—to enable smart IoT systems that can self‑govern, adapt to changing environments, and maintain safety and efficiency at scale. Future work will focus on refining the meta‑model, implementing the architecture, and expanding the approach to additional smart‑thing domains.
Comments & Academic Discussion
Loading comments...
Leave a Comment