Sustained sensorimotor control as intermittent decisions about prediction errors: Computational framework and application to ground vehicle steering
A conceptual and computational framework is proposed for modelling of human sensorimotor control, and is exemplified for the sensorimotor task of steering a car. The framework emphasises control intermittency, and extends on existing models by suggesting that the nervous system implements intermittent control using a combination of (1) motor primitives, (2) prediction of sensory outcomes of motor actions, and (3) evidence accumulation of prediction errors. It is shown that approximate but useful sensory predictions in the intermittent control context can be constructed without detailed forward models, as a superposition of simple prediction primitives, resembling neurobiologically observed corollary discharges. The proposed mathematical framework allows straightforward extension to intermittent behaviour from existing one-dimensional continuous models in the linear control and ecological psychology traditions. Empirical observations from a driving simulator provide support for some of the framework assumptions: It is shown that human steering control, in routine lane-keeping and in a demanding near-limit task, is better described as a sequence of discrete stepwise steering adjustments, than as continuous control. Furthermore, the amplitudes of individual steering adjustments are well predicted by a compound visual cue signalling steering error, and even better so if also adjusting for predictions of how the same cue is affected by previous control. Finally, evidence accumulation is shown to explain observed covariability between inter-adjustment durations and adjustment amplitudes, seemingly better so than the type of threshold mechanisms that are typically assumed in existing models of intermittent control.
💡 Research Summary
**
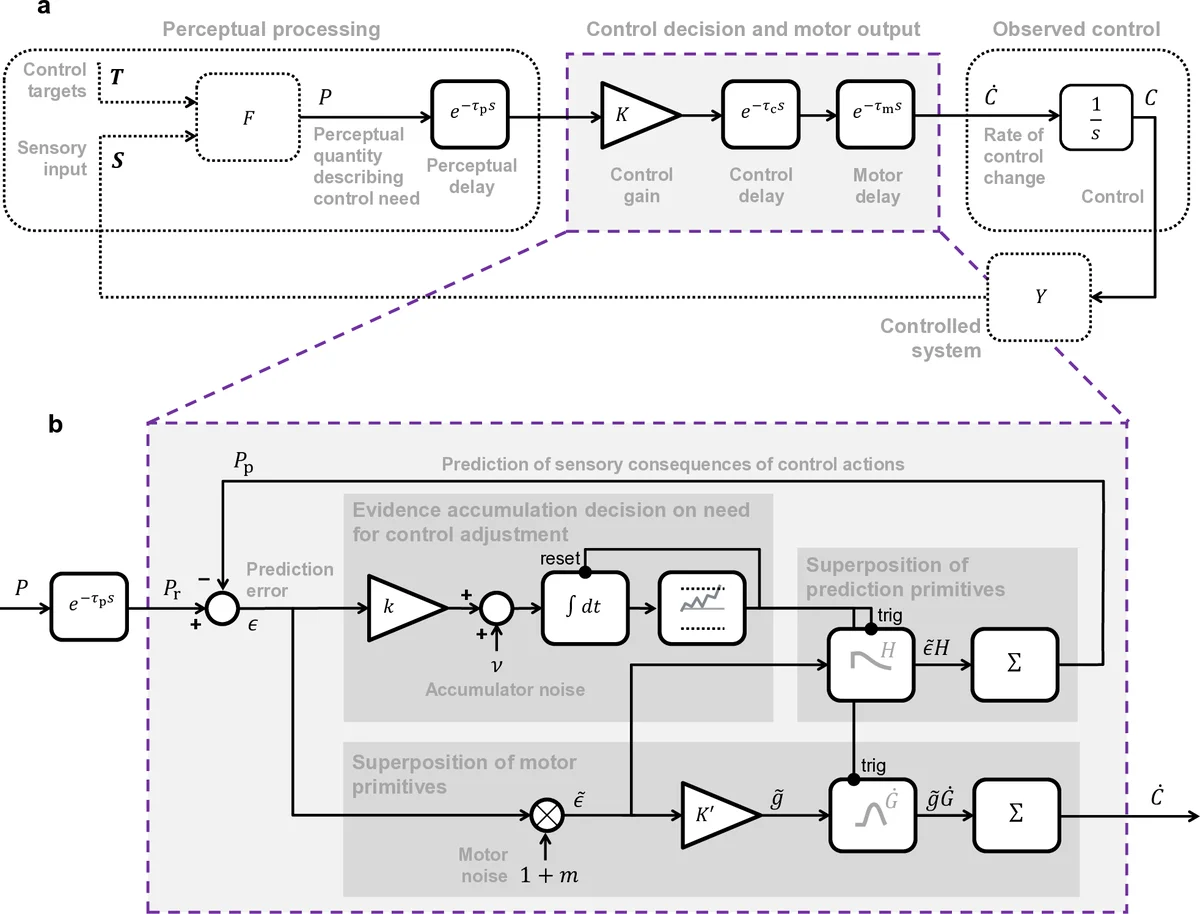
The paper introduces a novel computational framework for modeling sustained human sensorimotor control as a series of intermittent, decision‑like events. While classic models of sensorimotor behavior have relied on continuous linear feedback—treating the nervous system as a classical controller—the authors argue that many everyday actions, including vehicle steering, are better described as a succession of discrete, ballistic adjustments. The framework integrates three well‑established neurophysiological concepts: (1) motor primitives (or k‑primitives), which are stereotyped, time‑bounded movement pulses that can be scaled in amplitude; (2) sensory‑outcome prediction primitives (p‑primitives), simple corollary‑discharge‑like signals that estimate the expected sensory consequences of each motor pulse; and (3) evidence accumulation, a stochastic process that integrates prediction errors over time until a decision threshold is reached, triggering the next motor primitive.
Mathematically, the continuous control law δ̇(t)=K·e(t) is sampled at discrete intervals. At each sample, the prediction error ε(t)=P_r(t)−P_p(t) (the difference between the perceived control need and its predicted value) feeds an accumulator A(t) that evolves as dA/dt = ε(t) + η(t), where η(t) is Gaussian noise. When A(t) crosses either a positive or negative threshold, a new motor primitive is issued with amplitude g_i proportional to the accumulated error. The overall control signal becomes a linear superposition of primitives: δ(t)=∑_i g_i·k(t−t_i), where k(·) denotes the fixed temporal profile of a primitive. This formulation naturally yields intermittent plateaus and rapid step‑wise changes observed in real behavior.
To test the theory, the authors collected steering wheel angle data from participants in a driving simulator under two conditions: routine lane‑keeping and a demanding near‑limit steering task. Time‑frequency analysis revealed that the steering signal consists of distinct stepwise adjustments rather than smooth continuous modulation. Regression analyses showed that the amplitude of each adjustment is predicted far better when a composite cue—combining the instantaneous visual steering error and a prediction of how that error will evolve based on previous adjustments—is used, raising the explained variance from ~0.68 to ~0.81.
Crucially, the framework explains the observed covariation between inter‑adjustment intervals (Δt_i) and adjustment amplitudes (g_i). Larger errors produce faster evidence accumulation, leading to shorter Δt_i and larger g_i, a pattern that traditional intermittent models (which rely on fixed error thresholds or refractory periods) cannot capture. The evidence‑accumulation model reproduces this relationship quantitatively, supporting the hypothesis that the brain treats sustained control as a sequence of perceptual‑motor decisions, with error magnitude modulating the rate of decision formation.
Overall, the paper makes three major contributions: (1) it unifies motor primitives, sensory prediction, and evidence accumulation into a single, parsimonious intermittent control architecture; (2) it demonstrates that this architecture provides a superior fit to human steering data compared with continuous or threshold‑only intermittent models; and (3) it shows that simple prediction primitives, constructed as superpositions of the same motor primitives, can serve as effective internal models without requiring detailed forward dynamics. The work bridges concepts from ecological psychology, control theory, and decision neuroscience, suggesting that the nervous system may implement near‑optimal, Bayesian‑like evidence accumulation to manage the timing and magnitude of intermittent motor actions in everyday tasks.
Comments & Academic Discussion
Loading comments...
Leave a Comment