Social Vehicle Swarms: A Novel Perspective on Social-aware Vehicular Communication Architecture
Internet of vehicles is a promising area related to D2D communication and internet of things. We present a novel perspective for vehicular communications, social vehicle swarms, to study and analyze socially aware internet of vehicles with the assistance of an agent-based model intended to reveal hidden patterns behind superficial data. After discussing its components, namely its agents, environments, and rules, we introduce supportive technology and methods, deep reinforcement learning, privacy preserving data mining and sub-cloud computing, in order to detect the most significant and interesting information for each individual effectively, which is the key desire. Finally, several relevant research topics and challenges are discussed.
💡 Research Summary
The paper introduces a novel perspective on vehicular communications called “Social Vehicle Swarms” (SVS), which treats vehicles, drivers, and roadside infrastructures as agents in a swarm‑like system. By leveraging the concepts of agent‑based modeling (ABM), the authors aim to capture the hidden social patterns that emerge from the interactions among these agents and to use those patterns to improve the quality of experience (QoE) for each individual user. The work is motivated by the rapid growth of the Internet of Vehicles (IoV) and the pervasive influence of online social networks (OSNs), both of which generate massive, heterogeneous data streams. The authors argue that integrating social awareness into vehicular networks can bridge the gap between pure device‑to‑device (D2D) communication and the richer contextual information available from social platforms.
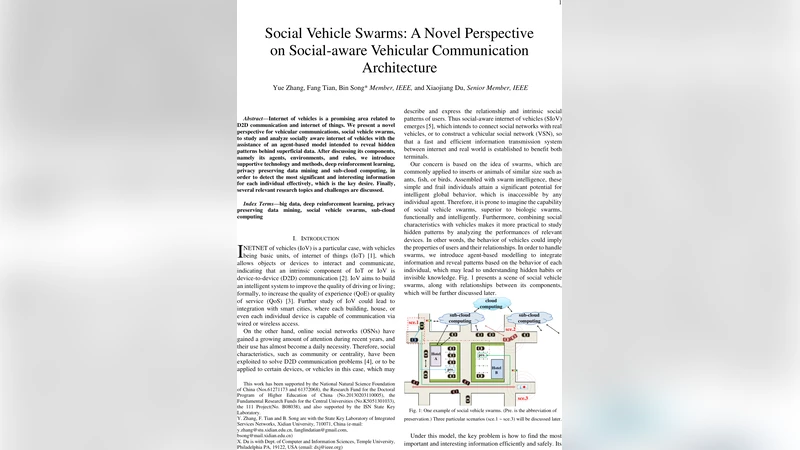
The architecture of SVS is built around three ABM components: agents (users, vehicles, and infrastructures), environments (big‑data platforms that aggregate sensor data and OSN feeds), and rules (both intra‑agent physical constraints and inter‑agent communication protocols such as U2V, V2I, and V2V). The environment is realized through a hybrid cloud/sub‑cloud (edge/fog) infrastructure, allowing data to be stored locally on vehicles or uploaded to nearby edge nodes for low‑latency processing, while still being accessible to central cloud services when needed.
To address the core challenge—identifying the most important and interesting information for each user in a timely and privacy‑preserving manner—the paper proposes three complementary technologies. First, Privacy‑Preserving Data Mining (PPDM) establishes a four‑party model (data provider, collector, miner, decision maker) with hierarchical access control, limiting the exposure of sensitive driver behavior data while still enabling useful analytics. Second, Deep Reinforcement Learning (DRL) is employed to learn policies that dynamically assess information relevance, personalize recommendations (e.g., parking spot selection, route planning), and adapt to unexpected events such as accidents. The DRL reward function explicitly balances QoE gains against privacy costs, allowing the system to negotiate the trade‑off between personalization and security. Third, sub‑cloud (edge/fog) computing reduces latency and bandwidth consumption, making real‑time decision making feasible for safety‑critical scenarios.
The paper illustrates the SVS concept through three scenarios. In Scenario 1, two vehicles choose hotels based on real‑time parking availability; the system coordinates choices to avoid over‑saturation, thereby improving resource utilization. Scenario 2 depicts an accident where V2V and V2I communications rapidly disseminate hazard information, enabling nearby vehicles to re‑route safely. Scenario 3 shows an emergency vehicle receiving priority treatment; social network cues (e.g., a user posting about a medical emergency) are used to dynamically adjust priority levels for ambulances, taxis, or other responders. These examples demonstrate how social context can augment traditional vehicular communication to achieve more intelligent, cooperative behavior.
The authors acknowledge several open research challenges. Designing comprehensive, scalable rule sets for agent interactions remains an open problem; automated rule generation or learning could be explored. DRL requires large amounts of labeled data and substantial computational resources, raising questions about feasibility in real‑world deployments. Maintaining data consistency and security across heterogeneous edge nodes is non‑trivial, especially when multiple stakeholders with differing trust levels are involved. Finally, extensive field trials are needed to validate the simulated benefits and to refine the integration of social network data with vehicular sensors.
In conclusion, the Social Vehicle Swarms framework offers a promising direction for making vehicular networks socially aware, privacy‑conscious, and highly adaptive. By uniting agent‑based modeling, deep reinforcement learning, privacy‑preserving mining, and edge computing, the approach aspires to deliver personalized QoE while safeguarding user data. However, substantial work remains to translate the conceptual model into robust, scalable systems capable of operating in the complex, dynamic environments of modern smart cities.
Comments & Academic Discussion
Loading comments...
Leave a Comment