Extending the centerpoint theorem to multiple points
The centerpoint theorem is a well-known and widely used result in discrete geometry. It states that for any point set $P$ of $n$ points in $\mathbb{R}^d$, there is a point $c$, not necessarily from $P$, such that each halfspace containing $c$ contains at least $\frac{n}{d+1}$ points of $P$. Such a point $c$ is called a centerpoint, and it can be viewed as a generalization of a median to higher dimensions. In other words, a centerpoint can be interpreted as a good representative for the point set $P$. But what if we allow more than one representative? For example in one-dimensional data sets, often certain quantiles are chosen as representatives instead of the median. We present a possible extension of the concept of quantiles to higher dimensions. The idea is to find a set $Q$ of (few) points such that every halfspace that contains one point of $Q$ contains a large fraction of the points of $P$ and every halfspace that contains more of $Q$ contains an even larger fraction of $P$. This setting is comparable to the well-studied concepts of weak $\varepsilon$-nets and weak $\varepsilon$-approximations, where it is stronger than the former but weaker than the latter.
💡 Research Summary
The paper “Extending the Centerpoint Theorem to Multiple Points” proposes a natural generalization of the classical centerpoint theorem by allowing a small set of representative points rather than a single one. The authors introduce a “generalized Tukey depth” (gtd) for a set Q of points:
gtd P(Q) = min_{h ∈ H, h∩Q ≠ ∅} |h∩P| / |h∩Q|,
and the analogous definition for a continuous mass distribution μ. This measure captures the idea that a halfspace containing more points of Q must contain a proportionally larger fraction of the underlying data.
The main theoretical contribution is Theorem 1. Given a mass distribution μ on ℝ^d (or a point set P of size n) and a non‑decreasing sequence of real numbers α₁ ≤ α₂ ≤ … ≤ α_k, assume that for every pair (i, j) with i + j ≤ k + 1 the inequality
(d − 1)·α_k + α_i + α_j ≤ 1
holds. Then there exist k points p₁,…,p_k such that any closed halfspace h containing exactly j of these points satisfies μ(h) ≥ α_j (or |h∩P| ≥ α_j n). In particular, setting all α_j = 1/(d + 1) recovers the classic centerpoint theorem, while choosing α₁ = … = α_k yields a weak ε‑net of size k with ε = 1 − α_k. The condition (d − 1)α_k + α_i + α_j ≤ 1 is a precise trade‑off between dimension, the number of representatives, and the desired depth guarantees.
For the planar case (d = 2) the authors obtain a stronger result (Theorem 2). For any 0 < α ≤ β with α + β = 2/3, there exists a triangle Δ (three points) such that every closed halfplane containing a vertex of Δ captures at least an α‑fraction of the mass, and every closed halfplane containing the whole triangle captures at least a β‑fraction. This can be viewed as a two‑dimensional analogue of the 1/3‑ and 2/3‑quantiles.
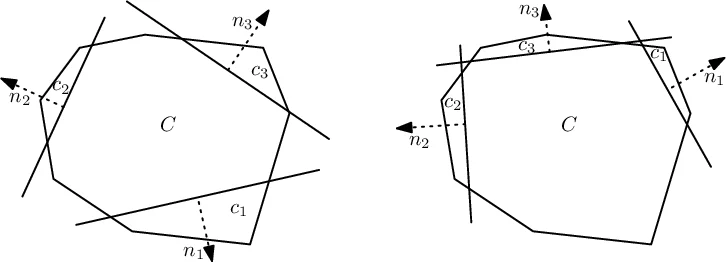
The paper also provides constructive algorithms. For k = 2 in the plane, an O(n log³ n) time algorithm finds two points satisfying the guarantees of Theorem 1 (with α₁ = 1/5, α₂ = 2/5). The algorithm builds the intersection C of all halfplanes that contain more than 4n/5 points, partitions the “large” halfplanes into left‑ and right‑oriented families, and applies Helly’s theorem to locate a point in each family that also lies in C. Placing the two representatives in these two regions yields the required depth properties.
The authors discuss the relationship of their model to weak ε‑nets, weak ε‑approximations, and one‑sided ε‑approximants. Their set Q is a weak (1 − α_k)‑net because any halfspace containing more than (1 − α_k) n points must intersect Q. However, unlike a weak ε‑approximation, a halfspace that misses Q may still contain up to half of the data, so Q does not guarantee the symmetric approximation property. The paper shows that the best possible approximation factor in this framework is 1/2, matching known lower bounds for weak nets in the plane.
Finally, the authors note limitations: the inequality (d − 1)α_k + α_i + α_j ≤ 1 restricts the attainable α‑values, especially in higher dimensions where α₁ + 2α_k < 1 can hold, allowing a halfspace that avoids Q to contain a large fraction of the data. Improving these bounds or designing faster algorithms for larger k or higher dimensions remains an open direction.
Overall, the work introduces a clean, quantile‑like extension of the centerpoint theorem, provides tight combinatorial conditions for its existence, supplies concrete planar constructions and algorithms, and situates the concept within the broader landscape of geometric sampling theory. It offers both theoretical insight and practical tools for summarizing high‑dimensional data with a small, depth‑guaranteed representative set.
Comments & Academic Discussion
Loading comments...
Leave a Comment