Modeling overland flow from local inflows in almost no-time, using Self Organizing Maps
Physically-based overland flow models are computationally demanding, hindering their use for real-time applications. Therefore, the development of fast (and reasonably accurate) overland flow models is needed if they are to be used to support flood mitigation decision making. In this study, we investigate the potential of Self-Organizing Maps to rapidly generate water depth and flood extent results. To conduct the study, we developed a flood-simulation specific SOM, using cellular automata flood model results and a synthetic DEM and inflow hydrograph. The preliminary results showed that water depth and flood extent results produced by the SOM are reasonably accurate and obtained in a very short period of time. Based on this, it seems that SOMs have the potential to provide critical flood information to support real-time flood mitigation decisions. The findings presented would however require further investigations to obtain general conclusions; these further investigations may include the consideration of real terrain representations, real water supply networks and realistic inflows from pipe bursts.
💡 Research Summary
The paper addresses the pressing need for rapid overland‑flow simulation tools that can operate in near‑real‑time, a requirement that traditional physically‑based flood models struggle to meet due to their computational intensity on high‑resolution urban terrain. The authors propose a hybrid approach that couples a fast cellular‑automata (CA) flood model with a Self‑Organizing Map (SOM), a type of unsupervised neural network that performs nonlinear dimensionality reduction while preserving topological relationships.
First, a synthetic benchmark terrain (Test 2 from Néelz and Pender, 2013) is used as the study area. Twenty‑nine random point‑source inflow locations are generated to mimic possible water‑supply pipe bursts. The CA model of Guidolin et al. (2016) is run for each location using the same inflow hydrograph, producing water‑depth fields that serve as training data. Twenty‑two of the locations are reserved for training, while the remaining seven are used for validation.
The SOM is trained on two separate datasets: one containing cells with zero water depth and another containing cells with positive depth. This bifurcated training mitigates the class‑imbalance problem inherent in flood simulations where the majority of grid cells remain dry. Input features for the SOM consist of the 2‑D coordinates of the inflow point and a set of local 3‑D terrain descriptors (elevation, slope, curvature, etc.) extracted around each cell. The output is the final water depth at each grid cell. Training is performed in Wolfram Mathematica and Grasshopper 3D, taking roughly one hour on a standard desktop (Intel Core i7, 8 GB RAM) without parallelisation.
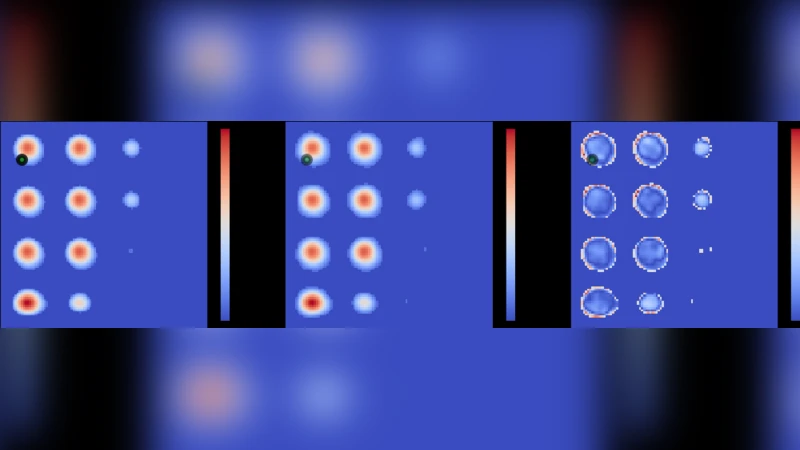
After training, the weight vectors of the two SOMs are combined with a K‑Nearest‑Neighbour (KNN) algorithm to predict water depths for new inflow locations. The validation results show a maximum absolute depth difference of 0.072 m and a mean absolute error of 0.003 m, corresponding to about a 10 % relative error. In terms of speed, the CA model requires approximately 11 seconds per simulation, whereas the SOM‑based prediction completes in about 2 seconds—a reduction of roughly 80 % (five‑fold speed‑up). The authors note that this computational advantage is expected to increase with larger grid sizes and larger flood volumes, and that expanding the training set would further reduce depth and extent errors.
The conclusions highlight that this is the first application of SOMs to two‑dimensional urban flooding driven by point‑source inflows. The results demonstrate that SOMs can deliver flood‑extent and water‑depth information with accuracy comparable to a fast CA model while requiring only a fraction of the computational time. Consequently, SOMs have strong potential for (i) real‑time flood forecasting and (ii) supporting emergency flood‑mitigation decisions such as rapid deployment of sandbag barriers. Their speed also makes them suitable for simulating hazardous‑substance spills and informing emergency services about optimal mitigation actions.
However, the study is limited to a synthetic terrain and a static inflow hydrograph. The authors call for further research that incorporates real, larger, and more complex urban DEMs, realistic water‑supply network topologies, and time‑varying inflow scenarios from pipe bursts. Expanding the training database and testing the approach on actual flood events will be essential to validate the generalisability of the SOM‑based framework for operational flood‑risk management.
Comments & Academic Discussion
Loading comments...
Leave a Comment