Generation of planar tensegrity structures through cellular multiplication
Tensegrity structures are frameworks in a stable self-equilibrated prestress state that have been applied in various fields in science and engineering. Research into tensegrity structures has resulted in reliable techniques for their form finding and analysis. However, most techniques address topology and form separately. This paper presents a bio-inspired approach for the combined topology identification and form finding of planar tensegrity structures. Tensegrity structures are generated using tensegrity cells (elementary stable self-stressed units that have been proven to compose any tensegrity structure) according to two multiplication mechanisms: cellular adhesion and fusion. Changes in the dimension of the self-stress space of the structure are found to depend on the number of adhesion and fusion steps conducted as well as on the interaction among the cells composing the system. A methodology for defining a basis of the self-stress space is also provided. Through the definition of the equilibrium shape, the number of nodes and members as well as the number of self-stress states, the cellular multiplication method can integrate design considerations, providing great flexibility and control over the tensegrity structure designed and opening the door to the development of a whole new realm of planar tensegrity systems with controllable characteristics.
💡 Research Summary
The paper introduces a bio‑inspired, cell‑based methodology for the simultaneous identification of topology and form in planar tensegrity structures. Traditional tensegrity design separates form‑finding (determining node positions that satisfy equilibrium) from topology synthesis (choosing which members are present). This separation often requires iterative numerical procedures and limits the designer’s ability to control the number of self‑stress states, which are crucial for stability and load‑bearing capacity.
The authors build on the concept of a “tensegrity cell,” the smallest stable self‑stressed unit in two dimensions. A planar tensegrity cell consists of three compression struts and three tension cables arranged in a triangular configuration. It possesses six geometric degrees of freedom and a one‑dimensional self‑stress space. Prior work has shown that any planar tensegrity can be decomposed into a collection of such cells, providing a universal building block.
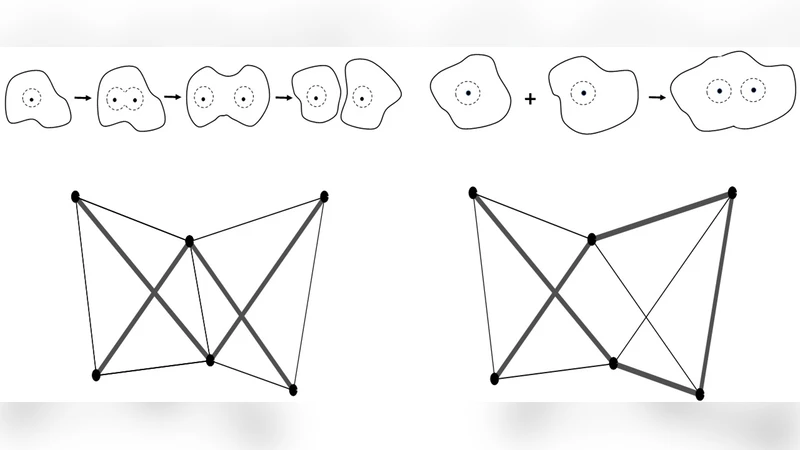
Two elementary operations—cell adhesion and cell fusion—are defined as the mechanisms for “cellular multiplication.”
- Adhesion adds a new cell to an existing structure by sharing one or more nodes. The new members are independent of the old ones, so the rank of the global equilibrium matrix either stays the same or increases by one, leading to a possible increase of one in the dimension of the self‑stress space.
- Fusion removes overlapping portions of two cells and reconnects the remaining parts. If (k) overlapping members are eliminated and (l) new connections are introduced, the self‑stress dimension changes by (-k + l). Fusion can therefore reduce, preserve, or increase the number of independent self‑stress states, depending on the specific geometry.
Mathematically, each cell contributes a local equilibrium equation (A_i t_i = 0), where (A_i) encodes the geometry (node‑member incidence) and (t_i) contains the internal forces. By assembling all local equations into a global matrix (A), the null‑space of (A) yields the self‑stress space (\mathcal{S}). The dimension of (\mathcal{S}) is given by (\dim(\mathcal{S}) = m - \operatorname{rank}(A)), with (m) the total number of members. The paper derives explicit rank‑change formulas for each adhesion and fusion step, allowing designers to predict how many self‑stress states will be present after any sequence of operations.
A systematic procedure for constructing a basis of (\mathcal{S}) is presented. After the final topology is generated, the global equilibrium matrix is formed and its null‑space is computed using singular value decomposition or Gaussian elimination. The resulting basis vectors correspond to independent self‑stress modes; each can be visualized by assigning color or thickness to members according to the sign and magnitude of the internal force. Designers can then allocate prestress to achieve desired stiffness, shape control, or robustness against external loads.
The methodology is illustrated through several examples: a simple triangular tensegrity, a square lattice, and a more complex polygonal assembly. For each case the authors detail (i) the initial cell layout, (ii) the sequence of adhesion and fusion operations, (iii) the resulting counts of nodes, members, and self‑stress states, and (iv) the explicit basis vectors. Numerical simulations show that the proposed approach reproduces known tensegrity configurations while offering precise control over the self‑stress dimension—something that conventional form‑finding algorithms cannot guarantee without additional constraints. Moreover, by assigning appropriate prestress values to the basis vectors, the structures exhibit significantly higher stiffness under prescribed external loads, confirming the practical advantage of controlling the self‑stress space.
The discussion acknowledges limitations. The current framework is restricted to two‑dimensional systems; extending the cell concept to three dimensions would require a different minimal cell (e.g., a tetrahedral tensegrity cell) and more complex fusion rules. Additionally, geometric collisions between cells must be checked during the multiplication process, which may necessitate a collision‑avoidance algorithm. Finally, as the number of self‑stress modes grows, the physical implementation of the required prestress (e.g., cable tensioning) becomes more involved.
Future work is outlined in three directions: (1) formulation of 3‑D tensegrity cells and corresponding multiplication operations, (2) development of automated optimization algorithms that select adhesion/fusion sequences to meet multi‑objective criteria (minimum weight, maximum stiffness, prescribed self‑stress count), and (3) experimental validation through physical prototypes fabricated with modern additive manufacturing and tensioning hardware.
In conclusion, the paper delivers a novel, mathematically rigorous, and practically useful strategy for generating planar tensegrity structures. By treating tensegrity cells as modular units and controlling topology through adhesion and fusion, designers gain direct command over the number of nodes, members, and independent self‑stress states. This integrated topology‑form approach reduces reliance on iterative numerical form‑finding, enhances design flexibility, and opens a pathway toward a new class of planar tensegrities with tailor‑made mechanical characteristics.
Comments & Academic Discussion
Loading comments...
Leave a Comment