Learning Simplicial Complexes from Persistence Diagrams
Topological Data Analysis (TDA) studies the shape of data. A common topological descriptor is the persistence diagram, which encodes topological features in a topological space at different scales. Turner, Mukeherjee, and Boyer showed that one can reconstruct a simplicial complex embedded in R^3 using persistence diagrams generated from all possible height filtrations (an uncountably infinite number of directions). In this paper, we present an algorithm for reconstructing plane graphs K=(V,E) in R^2 , i.e., a planar graph with vertices in general position and a straight-line embedding, from a quadratic number height filtrations and their respective persistence diagrams.
💡 Research Summary
The paper tackles the problem of reconstructing a planar straight‑line graph (a simplicial complex consisting only of vertices and edges) from a finite set of directional persistence diagrams. Prior work on the Persistent Homology Transform (PHT) showed that a simplicial complex embedded in ℝ³ can be uniquely identified if one has persistence diagrams for all possible height filtrations, i.e., an uncountable family of directions. This requirement is impractical for any real application. The authors therefore ask whether a polynomial‑time reconstruction is possible when only a finite, polynomial‑size collection of directions is available, and they answer this affirmatively for the special case of plane graphs in ℝ².
The core of the method is split into two stages: vertex reconstruction and edge reconstruction.
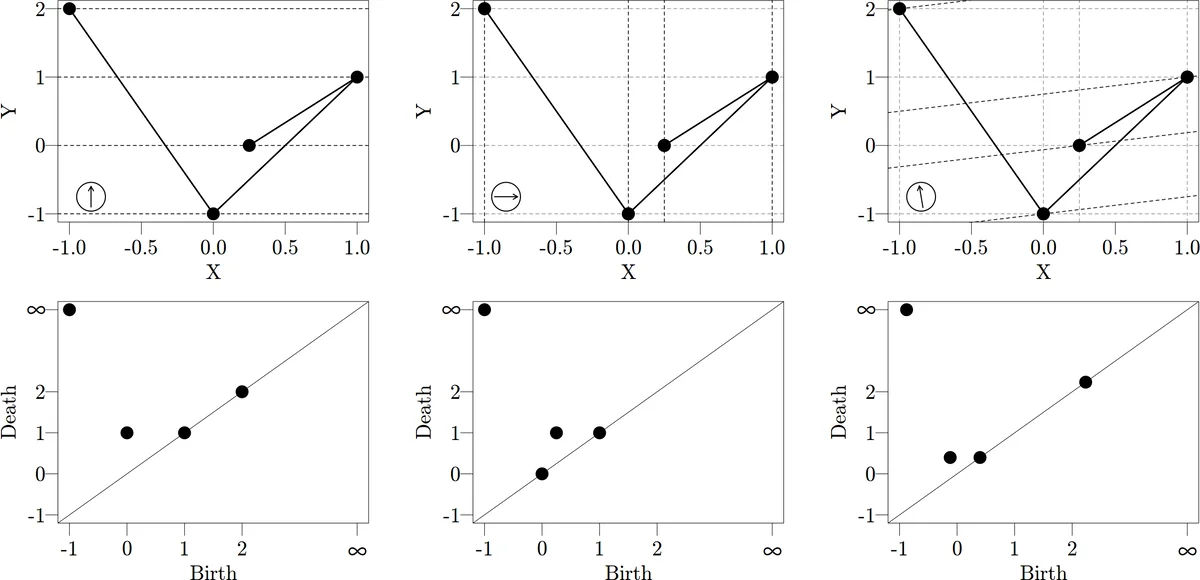
Vertex reconstruction relies on the observation that the 0‑dimensional persistence diagram of a height filtration records a birth event for each vertex at the height where the vertex first appears. For a fixed direction s, the height of a vertex v is hₛ(v)=max_{u∈v} u·s, and the line orthogonal to s passing through the point hₛ(v)·s is called a filtration line. All vertices generate a parallel family of such lines, denoted L(s,V). By taking two linearly independent directions, e.g., s₁=(1,0) (horizontal) and s₂=(0,1) (vertical), one obtains two families of parallel lines whose pairwise intersections form a grid of n² candidate points. Only n of these points correspond to actual vertices. The authors show that a third direction s₃ can be chosen deterministically from the geometry of the bounding box of the grid so that each line in L(s₃,V) intersects the grid exactly once, and each intersection of the three families coincides with a true vertex. Lemma 3 (Vertex Existence Lemma) formalizes this property. The algorithm proceeds as follows:
- Compute D₀(s₁) and D₀(s₂) from two persistence diagrams; each yields the set of filtration lines L(s₁,V) and L(s₂,V) in O(n) time.
- Sort the lines by their intercepts to obtain the smallest axis‑aligned bounding box B and the maximal horizontal spacing w and minimal vertical spacing h.
- Choose s₃ as a direction slightly shallower than the diagonal of B (Lemma 4 guarantees the required intersection property).
- Compute D₀(s₃) to obtain L(s₃,V) in O(n) time.
- Sort L(s₃,V) according to its intersection order with the leftmost line of L(s₁,V).
- Pair the i‑th line of L(s₂,V) with the i‑th line of L(s₃,V); their intersection yields the i‑th vertex.
The total time is O(n log n) (dominated by the sorting steps) and only three directional diagrams are required.
Edge reconstruction assumes the vertex set is now known. For any vertex v and direction s, the indegree Indeg(v,s) is defined as the number of incident edges whose other endpoint lies lower than v in direction s. The authors prove (Lemma 7) that Indeg(v,s) can be read directly from the persistence diagrams: each death in D₀(s) at height v·s corresponds to an edge that merges two components, and each birth in D₁(s) at the same height corresponds to an edge that creates a 1‑cycle. Consequently, Indeg(v,s) = |{(x,y)∈D₀(s) | y=v·s}| + |{(x,y)∈D₁(s) | x=v·s}|.
To determine whether an edge (u,v) exists, one can query indegrees for a collection of directions S. If for some direction s the indegree of v equals the number of lower neighbours that includes u, then (u,v) is a candidate edge. By using O(n²) directions (for example, all pairwise slopes between vertices), the algorithm can resolve the adjacency for every vertex pair. The edge‑reconstruction phase therefore requires n(n−1) persistence diagrams (both 0‑ and 1‑dimensional) and runs in polynomial time (the dominant cost is the O(n³) verification of candidate edges).
The paper makes several important assumptions: vertices are in general position (no three collinear, no shared x‑ or y‑coordinates), and the embedding is straight‑line. Under these conditions the filtration lines are distinct and the lemmas hold. The authors also discuss the relationship of their finite‑direction bound to the Radon transform, noting that similar direction‑count bounds have appeared independently.
Contributions and significance:
- Provides the first polynomial‑time algorithm that reconstructs a planar simplicial complex from a finite set of persistence diagrams, reducing the infinite‑direction requirement of the PHT.
- Shows that only three carefully chosen directions suffice for exact vertex localization, with O(n log n) runtime.
- Demonstrates that edge recovery can be achieved with O(n²) additional diagrams, using indegree counts derived directly from 0‑ and 1‑dimensional persistence.
- Offers a rigorous theoretical guarantee of correctness, assuming general position.
- Opens the door to practical TDA‑based shape reconstruction where only a limited number of scans or viewpoints are available (e.g., robotics, medical imaging, geographic information systems).
Overall, the work bridges a gap between the theoretical injectivity of the Persistent Homology Transform and practical algorithms that operate with a manageable amount of topological data. While experimental validation is not presented, the detailed proofs and algorithmic analysis lay a solid foundation for future implementations and extensions to higher dimensions or more general simplicial complexes.
Comments & Academic Discussion
Loading comments...
Leave a Comment