Real time state monitoring and fault diagnosis system for motor based on LabVIEW
Motor is the most widely used production equipment in industrial field. In order to realize the real-time state monitoring and multi-fault pre-diagnosis of three-phase motor, this paper presents a design of three-phase motor state monitoring and fault diagnosis system based on LabVIEW. The multi-dimensional vibration acceleration, rotational speed, temperature, current and voltage signals of the motor are collected with NI cDAQ acquisition equipment in real time and high speed. At the same time, the model of motor health state and fault state is established. The order analysis algorithm is used to analyze the data at an advanced level, and the diagnosis and classification of different fault types are realized. The system is equipped with multi-channel acquisition, display, analysis and storage. Combined with the current cloud transmission technology, we will back up the data to the cloud to be used by other terminals.
💡 Research Summary
The paper presents a comprehensive real‑time monitoring and fault‑diagnosis system for three‑phase industrial motors, built around National Instruments (NI) cDAQ hardware and LabVIEW software. The authors first motivate the need for continuous condition monitoring of motors, noting that early detection of minor faults can prevent catastrophic failures and costly downtime. They then enumerate system requirements: multi‑channel acquisition of vibration acceleration (triaxial), rotational speed, temperature, current and voltage at sampling rates ranging from 1 kS/s to 25 kS/s; real‑time preprocessing (filtering, amplification, conversion to physical units); visualization of current parameters and motor state on an industrial PC (IPC); advanced analysis for fault source identification; and data archiving at 10 ms intervals in a MySQL database with redundant storage on both a local server and an Alibaba Cloud instance.
Hardware architecture consists of an NI cDAQ‑9188 Ethernet chassis hosting three NI modules: the 9232 (3‑channel, 102.4 kS/s vibration/acceleration board), the 9205 (16‑bit, 32‑channel voltage/current board), and the 9211 (4‑channel temperature board). These modules acquire raw sensor signals and transmit them via TCP/IP to the IPC. The software, developed in LabVIEW 2015, follows a two‑tier producer‑consumer pattern: a data‑acquisition loop (producer) reads the cDAQ streams and places raw samples into a buffer; a processing loop (consumer) pulls data for filtering, scaling, and analysis. Kalman filtering reduces measurement noise, after which each channel is scaled to physical units.
Two levels of analysis are implemented. The first, a threshold‑based assessment, compares each parameter against pre‑defined upper and lower limits; violations trigger visual alarms on the GUI. The second, more sophisticated level, employs order (or “o‑d”) analysis to detect mechanical faults that manifest as changes in vibration spectra relative to rotational speed. The authors model the rotor angle θ as a polynomial function of time, estimate its coefficients via least‑squares, and compute equal‑angle sampling points for resampling the acceleration signal. After interpolation, a Fast Fourier Transform (FFT) yields the order spectrum. By tracking the amplitude of specific orders (e.g., 10th and 14th) across speed variations, the system can pinpoint fault sources such as bearing defects or gear mesh issues.
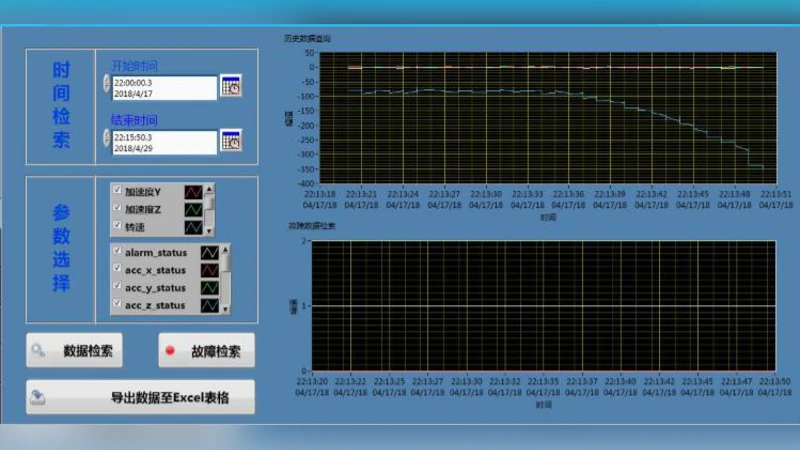
All processed data, along with status flags and alarm records, are written to a MySQL 5.7.20 database every 10 ms. The database schema comprises four tables (sensor values, state flags, alarm logs, and user settings). LabSQL toolkit enables remote queries to the cloud‑hosted MySQL instance, while a built‑in GUI provides historical data browsing, charting, and export to Excel.
The system was field‑tested from March 2018 for two months. During this pilot phase, it demonstrated stable operation with data latency well below the 10 ms requirement, no observable data loss, and reliable cloud backup. Comparative order spectra of a healthy motor and an intentionally damaged motor showed markedly higher amplitudes at the 10th and 14th orders for the faulty case, confirming the diagnostic capability of the order‑analysis module. The user interface displayed real‑time waveforms, status indicators, and alarm messages, and allowed operators to retrieve and export historical records.
In conclusion, the authors have delivered a functional, LabVIEW‑centric platform that integrates high‑speed multi‑sensor acquisition, real‑time preprocessing, dual‑level fault analysis, and robust data management with cloud redundancy. While the solution leverages proprietary NI hardware and LabVIEW, which may affect cost and scalability, it effectively meets the targeted industrial monitoring needs. Future work is outlined to incorporate additional advanced algorithms (e.g., machine‑learning classifiers), improve edge‑computing capabilities, and explore more cost‑effective hardware alternatives.
Comments & Academic Discussion
Loading comments...
Leave a Comment