Adaptive Matching Pursuit based Online Identification and Control Scheme for Nonlinear Systems
The complexity of adaptive control of nonlinear time-varying systems requires the use of novel methods that have lower computational complexity as well as ensuring good performance under time-varying parameter changes. In this study, we use adaptive …
Authors: Hamid Khodab, ehlou
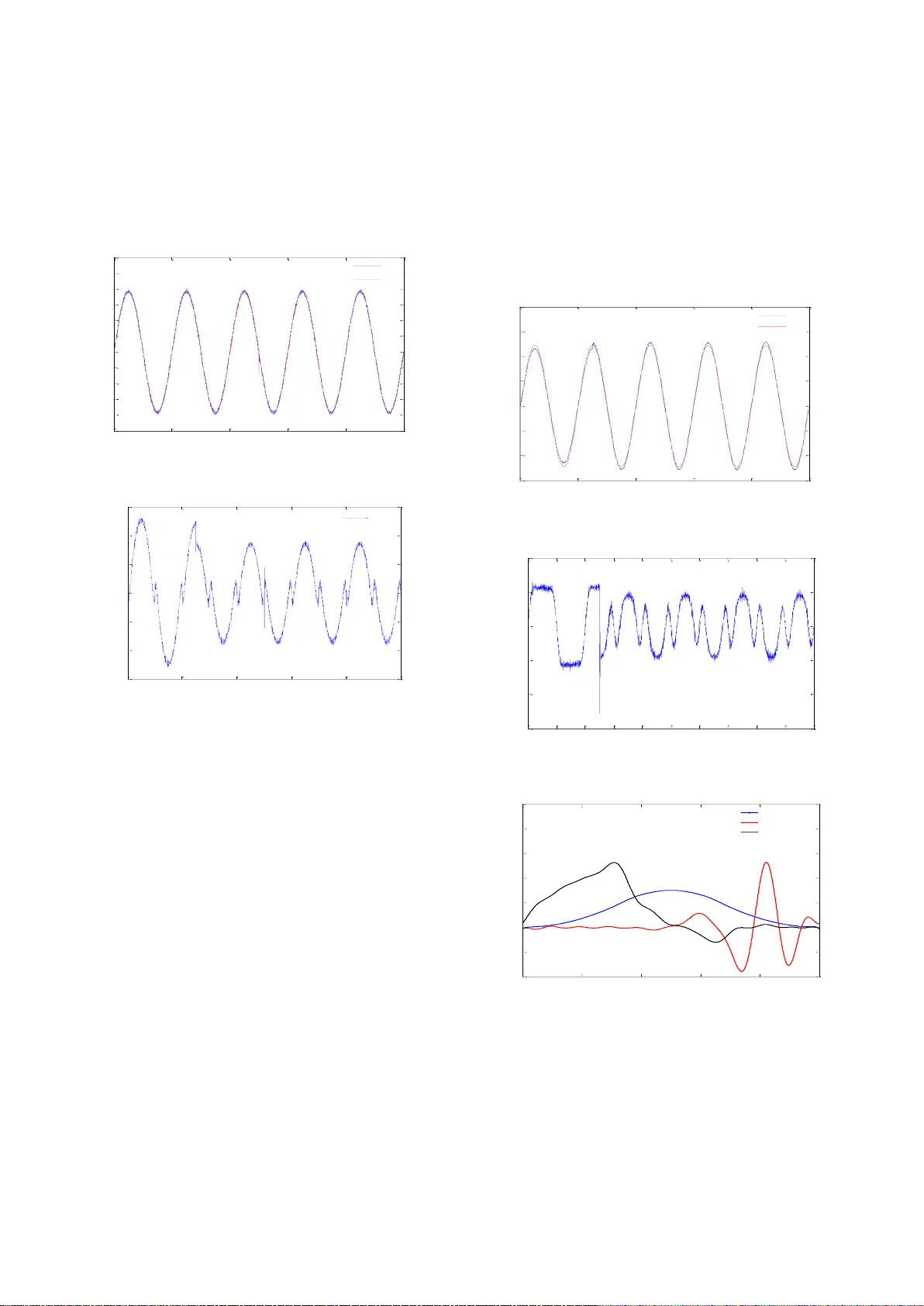
Adaptive Matc hing Pursu it based O nline Ident ification and Co ntrol Schem e For Nonlinear Sy stem s Hamid Khodabandehlou Electrical and Biomedical E ngineering Depart ment, Universi ty of Nevada, Reno Reno, NV, USA e-mail: hkho dabandehlou@nevada .unr.edu Abstract: Complexity of adaptive control of nonlinear time varying systems requires the use of novel methods that ha ve lo wer co mputational co m plexit y as well as insuring good perfor mance under time varying parameter changes. I n this s tudy, we use adaptive matching pursuit algorithm with wavelet bases for an o nlin e identificatio n and control of nonlinear s ystem with time var ying parameters. We apply the proposed online identificatio n and co ntrol scheme to two different benc hmark exa m ples of nonlinear system identification a nd control . Simulation results s how that the propo sed algorithm, using adaptive matching pursuit with wavelet bases, can effectively identify and co ntrol the nonlinear system eve n in presence of time varying par ameters . Keywords: Online id entification, matching pursuit, wavelets . 1. INTRODUCTI ON Allgöwer and Zheng (2000) ar gued that despite availability of various ad aptive control m ethods, application of these methods requires the knowled ge and accessibility to an accurate mathematical model of the s ystem. Ho wever, there are often un-modeled dynamics in most of real- world applications that raises serious questions o n the p erformance of model-based control systems. As such any atte mpt u sing model free met hods that have accep table performance fo r controlling no nlinear systems are co nsidered to be o f great importance. Findeisen and Allgöwer (2000) noted that while t here are different model-based methods for adaptive control of li near systems, any novel ap proach in dealing w ith nonlinear systems requires also the use of s uitable ad aptive control method to insure satisfactor y performance in such systems Artificial neural net works have proven to b e able to approximate any nonlinear system with desired accuracy hence ne ural networks received great deal o f atte ntion in identification of n onlinear systems (Khdabandehlou and Fadali, 2017) . Neural net w ork w as u sed by Han et al. (2 005) as an ident ifier for nonlinear sys tem and u sing the model obtained b y neural network; generalized predictive controller is designed and applied to nonlinear system. However, despite the advantages gained by neural networks in nonlinear system identification, their s low convergence rate and co mputational complexity raises serious q uestions on their application for an onl ine identification and co ntrol of nonli near systems. To r esolve this problem, control en gineers have proposed the use o f wavelet net w ork where the structure of this network is co m pletel y similar to neural networks and where the onl y difference is in ac tivation functions. I n wavelet networks acti vation functions are wavelets which may have different scale s and shifts. Q.zhang and B eneveniste (19 92) showed t hat wavelet networks can approxi m ate an y nonlinear function the same as do ne by neural networks. They also ar gued that for given nonlinear s ystem a nd desired accuracy of ap proximation, wavelet neural network ma y have fewer nodes as compared with artificial neural networks a nd hence wavelet neural networks may b e a better choice for an online identification and co ntrol of nonlinear systems. Sou sa et al. (2002) used a wavelet net work as a model identifier for identification and control of robot an d the results are compared with t he case of using neural network. Stability of th e closed loop sy stem is insured based on the s econd method of Lyapunov. Zayeni and Ahmadi applied a R adial w avelet network for identification of nonlinear syste m. Structure of this network is similar to structure of Radial basis fun ction networks in w hich learning method used is also si m ilar to this network where the only difference is that n odes activation functions are wavelets. Self-Recurrent wavelet neural network with adaptive learning rate w as used as a m odel identifier by Yoo et al. (2006). Based on this model, generalize d p redictive co ntroller is designed for nonlinear syste m and where the stability of the close loo p system is proved using the Lyapunov met hod. Wavelets have been widely used in identificatio n and control of linear and nonlinear systems. Khodab andehlou et. al. (2018 ) used wavelet neural net w ork and model predictive co ntroller to control a seismically isolated structure during earthquak e. Their simulation results s how th at wavelet neural network based controller can effectivel y control the structure during near fault and far field ground motions. Khod abandehlou and Fadali (20 17) used wavelet n eural network with feedforward component to control an unmanned vehicle over the communication channel. T heir simulation results sho w th at wavelet neural net work with feedforward co m ponent c an effectively identify the m odel of the unmanned vehicle in presence of fixed and random network dela ys and packet loss. Shmilovici a nd Maimon applied adap tive matching pu rsuit algorithm to identification o f nonlinear system and using this method w ith Spline bases, they identi fied and co ntrolled nonlinear system. Algorithm is applied to several nonli near systems in which si mulation results show that alg orithm y ields high performance in identification of nonlinear systems. I t is shown that due to localization proper ty o f wavelets during approximation, algor ithm has low co m putational co mplexity and where with current d evices can be implemented ea sily. In this work we use adaptive matching pursuit with wavelet bases for identification and co ntrol of nonlinear ti me var ying system. W e appl y the algorithm to two type of no nlinear time varying systems: systems with slo w parameter changes an d systems with fast cha nges in parameters. Simulation results show that wavelet bases can lead to hig h p erformance i n identification and control of the giv en process w here cha nges in par ameters i n both cases p oses no major difficulty on the tracking o f the clo sed loop system. It i s shown that t he changes in parameters may have direc t effect on the clo sed loop input where based on the ca se we stud y , they ma y cause the control input to beco m e smaller or gre at. Sections o f this paper are or ganized as follows. Section 2 describes the matchin g pursuit algorith m as pro posed by S.G.Mallat. Sectio n 3 describes the ad aptive matc hing pursuit algorithm and sectio n 4 d escribes the applicat ion o f ad aptive matching pursuit to adaptive control follo wed b y the illustration of simulatio n results shown in section 5. 2. MATCHING P URSUIT The m atching p ursuit prop osed by S.G. mallat solves the following proble m : Given a collection o f vectors {} Dg in the Hilbert space where all the vectors have unity nor m, it is d esired to describe a given function f using these base s. T his met hod is similar to the Projection Pursuit that is used in Statistics. Collection of vectors D is referred to as dictionary where vectors are called ato m s analo gous to atoms a s b asic entities of the given ensemble. T he p roblem of vector/functio n expansion using D can b e formulated as follows: Assume that {} Dg be a dictionary with PN Atoms of unity nor m which belong to the Hilbert space. T his dictionary has N linearly independent vector s that form a basis for N C . A rep resentation of the f orm of eq.(1) for functio n f is to be f ound where v P indicates th e orthogonal projection on space {} V sp an g n . P f a g v n n n (1) The Algorithm begins with projection of f onto 0 gD and calculation of resid ue Rf : 00 , f f g g R f (2) And hence Rf is orthogonal to 0 g : 2 22 0 , f f g Rf (3) For minimizing Rf , the atom 0 gD have to be chosen such that 0 , fg is maximum. In the next iteration, 1 , Rf g is chosen to be maximum and algorithm continues the same way. In the M’th i teration o f t he al gorithm, an intermediate representation of function f can be expressed as follows: 1 , 0 M mM f R f g g R f mm m kk f R f (4) In general, in each iteration of the algorith m , t he following operations have carried -out.: 1) Calculate the projection of k Rf on all of the dictionary elements. 2) Fin d the index 1 k for which the pro jection is maximal. 1 1 sup , k k k R f g ( 5 ) 3) Update the model 3. IDENTIFICATI ON WITH ADAPTIVE MATCHING PURSUI T Schmilovici a nd Mai m on ar gued t hat u nder the conditio n where the signal to noise ratio is high enoug h and the identification proce ss is sufficiently faster than the chan ges of system dynamics, t hen the subspace at a ny given ti me can be approximated as a single point of fH . So at any instance, it is sufficient to m o dify only o ne of the model coefficients that prod uce the largest residual erro r and the other coefficients will re main unchanged. Implementation of the algorithm i n finite vec tor space depends on the definition o f t he nonlinear functio n to be identified. In this work we will consider the model as a nonlinear auto - regressive with exogeno us input (NARX) as in (6). ( ) ( ( 1 ), ..., ( ); ( 1 ), ..., ( )) ( ) y k f y k y k p u k u k q n k (6) Where f is the function to be identified and , u y R are system input a nd output respec tively and , pq are positive integers and () nk is the measure ment noise which is as sumed to be white (due to NARX for mulation). De fine: 1 [ ( ) , ..., ( )] [ ( 1 ), ..., ( ); ( 1 ), ..., ( )] n kk y k y k p u k u k q (7) In general, w e wa nt to approximate a function of measurements in t he form of basis expansion as given in the following form. ˆˆ ( ( )) ( ) ( ) ( 1 ) T f k f k g k k (8) Where () k is an n dimensional vector that co ntains the model coefficients at iteration k and therefore we have: 12 ( ) [ ( ( )) , ... , ( ( )) ] g k g k g k (9) Where ( ( )) i gk represents the projection o f vector () k on the basis i g . For an online implementation of the algorit hm, a process in t he form o f ( 10) is t o be found to update to follo w the changes of f . ( ) ( 1 ) ( ) k k w k (10) Where () wk repr esents the c hanges in the para meters vector due to approximation and ad aptation error s. W ith this assumption, the follo wing proced ure is proposed for updating : 1) Calculate () gk 2) Fin d index ( ) [ 1 , ... , ] m k n for which the element () ( ( )) mk gk in the vector () gk is maximum. 3) Update the model. Define: ( 1 ) ( ) ( ) ( 1 ) T e k y k g k k Consequently, the equation a ccording to which is updated w ill be as (12). (11) 1 ( ) 1 ( ) ( ) 1 () ( ) [ ( 1 ), ..., ( 1 ), ( 1 ) ( 1 ) , , ..., ( )] ( ( )) m k m k m k n mk kk kk ek k gk (12) Due to point wise estimatio n, the sensitivity of the algorithm to the number of b asis functions is not too high. Ho w ever in practical im plementations, since the num ber of b asic functions has great effect o n the computatio nal complexity, convergence rate o f the algorith m and the erro r covariance, selection of suitable basis functions is of g reat importance. Simulation results sh ow that if the number o f b asis functions is low er than n , the approximation error may increase rapidl y which will lead to high tracki ng error which in t urn leads to output distortion which will be explained in next section. In or der to avoid suc h proble m s, the conser vative choice w ould be t o choose at least n basis functions. The co nvergen ce of algorithm , as in other adap tive methods, depends on the statistical p roperties of the algorit hm inputs. Shmilovici and Maimon pr oposed a p roof to algorithm wit h certain assumptions on t he algorithm inputs. T hese assumptions are too co nservative and ar e us ually violated i n real world applications. Using lemma pr oposed by Lju ng and Priouret (2007), the assumpti ons can b e r elaxed so that the convergence of t he algorithm can be insured. The prop osed method under relaxed assumpt ions is still conver gent and also able to identify t he n onlinear system but the convergence limit is different and th e identification error is g reater than the previous case. 4. APPLICATI ON TO ADAPTIVE CONTROL In this p aper the no nlinear time varying system is conside red as (13). ( ) ( ( 1 ), ..., ( ); ( 1 ), ..., ( )) ( ) y k f y k y k p u k u k q u k (13) Where f is the nonlinear s ystem to be id entified and , u y R are system inp ut a nd output respectively and the vector [ ( 1 ) , ... , ( ) ; ( 1 ) , ... , ( ) ] y k y k p u k u k q is assumed to b e measurable. T he co ntrol objective is that th e system output f ollows the output of the n’th or der lin ear stable system as (14 ). ( ) ( ) ( ) 1 n y k s y k i r k mm i i (14) Where 1 {} i i n s are the c oefficients o f the reference m odel characteristic equatio n and () rk is the reference i nput. With this assumption, the r eference input will go through the lo w pass filter which smoothens the reference signal that in turn will lead to smoothness of the closed loop input an d smaller closed loop input because sharp changes in refere nce signal may force the controller to i mply great controlling input. T he 1 {} i i n s should b e chosen s o that all o f the desired r oots of the characteristic eq uation 1 1 () nn n h z z s z s lie in the unit circle so that the desired model be stab le and well behaved. The error between the system output and the reference model output can be defined as ( ) ( ) ( ) e k y k y k m . The nonlinear system approximation error can be defined as ˆ ( ) ( ) ( ) k f k f k , where ˆ () fk is the approximation of the nonlinear function () fk at iteration k . () k is referred to as matching condition. The obj ective of the adaptation algorithm objective is to insure asympto tic tracking as give n by (15 ) as follows. 1 ( ) ( 1 ) 0 n e k s e k s (15) In the case of pr efect matching condition, ( ) 0 k , therefore it is expected that lim ( ) 0 ek k w hich can be which can be achieved b y the control law as given below. ( ) [ ( ) ( )] T u k f s k r k (16) By s ubstituting (1 6) in (13) and s ubtracting t he result from (14),the (15) will be ob tained. Ho wever, since the no nlinear function is unkno wn, i n (16) f will be rep laced with ˆ k f obtained from (8). T herefore the control law will be as (17 ). ˆ ( ) [ ( ) ( )] T ck u k f s k r k (17) This eq uation is called th e certaint y equivale nce controller which implies that in the c ase of prefect matching, this controller will be equivalent to the controller that is designed if the nonlinear function was known. In the pr evious sectio n it was mentioned that if the number of basis functions be lower than n will lead s to output distortio n . From (1 3) and (17) it is obvious that ( ) ( ) ( ) m y k y k k and from this equation it can be realized that the identification error directly affects the s ystem output. T he general schem e of identification and co ntrol is shown in the Fig.1 Fig.1 : general sche m e of identificat ion and control 5. SIMULATION RESULTS As an ill ustration of t he applica tion o f the pr oposed method , we appl y the al gorithm to t w o sets of systems: 1) system with slow para m eter cha nges and 2) system with s ufficiently fast parameter c hanges. The systems are chosen based o n the systems used by sh milovici,Maimon and Zayeni, Ahmadi w ith some modifications. In order to have nonlinear time varying behavior, time varying coe fficients are co nsidered in the models. The sensitivity of the algorithm to t he number of basis functions i s not too high, but we have chosen at lea st n basis functions to ensure a desirable identification perfor mance. Also the al gorithm is indifferent to the t ype of basis functions but f or good id entification and tracking per formance, it is preferable to choo se the basis f unctions that ha ve similar behavior as the given nonlinear function to be identified which can be d one by having a set o f input -output data of t he system. I n this work, depending on the nonlinear function, DB2, DB3, DB3, DB4, DB5, BIOR3. 1, BIOR3.3 w avelets a nd their corr esponding scaling functions are used as ba sis functions. Since the values of the co nsidered wavelets and scaling fu nctions ten d to zero around 10 ts , basis functions were shifted to fully cover this region. In recursive methods, one of the convergence conditions is that the input signal to be enough exciting. In this case it can be concluded that the algorit hm co nverges rapidly, i f m y be enough exciting . Also it s hould be mentioned that t he numerical estimat ion of this wavelets an d scaling functions have been calculated using MATLAB. Due to po int wise esti mation of the algorit hm, the simulation time is fast e nough and the algorithm can b e implemented in on line identificatio n a nd control ap plications. 5.1 Example 1 In thi s example the nonli near t ime varying system is expressed as follows: ( ) [ ( 1 ), ( 2), ( 1 )] ( ) ( ) y k f y k y k u k u k n k (18) Where 2 2 2 [ ( 1 ), ( 2), ( 1 )] ( 1 )[ ( ) ( 1 ) ( 2) 2.5 ] 1 ( 1 ) ( 2 ) ( 1 ) f y k y k u k y k a k u k y k y k y k u k And () ak is time var y ing coefficient whose value is i nitially one and increased 20 % from 0 ts to 25 ts . According to (18) at least three b asis functio ns are required . T he characteristic equation of the reference m odel whos e output is to be followed by the system is considered of order three and is expressed as (19). ( ) 1.3 ( 1 ) 0.7 2 ( 2) 0.1 6 ( 3 ) ( ) m m m m y k y k y k y k r k (19) Where () rk is the reference input. Reference mod el has three poles in unit circle which are placed at 0.5 and 0 .4 0. 4 i .using (16) the closed loo p input can be expres sed as (20). ˆ ( ) ( ) 1.3 ( 1 ) 0.72 ( 2) 0.1 6 ( 3 ) ( ) c m m m u k f k y k y k y k r k (20) Where the reference input is s inusoidal and t he measure ment noise, () nk , is assumed to be w hite Gaussian n oise with standard deviation of 0 .01. Basis fu nctions are d efined in th e region [0 ,10 ] seconds and assumed to b e periodic ( Fig.2 ). In Fig.3 the system output and the reference model outp ut are shown where Fig.4 depicts the closed lo op input. Fig.2. Basis functio n of example 1 In 50 ts it is observed that the erro r increases substantially(Fig.2) which can be explained accor ding to (12) in which () ( ( ) ) mk gk tends to zero in some periods of time which in t urn will be prob lematic because of division to zero in (12). T he intuitive idea would be to consider a very s mall 0 2 4 6 8 10 -1.5 -1 -0.5 0 0.5 1 1.5 2 2.5 3 Time[s] first basis secon d basis third basis value ( ) in the denominator of (12) in such cases. However this choice seems to be suitable, but this small value tends t o undesirable increase o f one of the coefficients. This ca n result in an unacceptable err or for long time. Hence it is preferred that the value o f not to be too small. However large values for will lead to the output similar to the one shown in t he fig.3. Fig.3. System output and the reference model output Fig.4. Closed loop input 5.2 Example 2 The nonlinear syste m of this exa m ple is based on [6] wh ich is also modified to have time varying behaviour. T he nonli near system is as follo ws: 2 2 ( 1 ) ( ) ( 0.8 0.5 ) ( 1 ) ( ) ( 1 ) (0.3 0.9 ) ( 2) 0.1sin( ( 1 )) ( 1 ) ( ) yk y k e y k a k yk e y k y k u k n k (21) Where () ak is ti m e varying coefficient w hose value is initially o ne a nd cha nges to th ree at 25 ts and () nk is the measurement noise which is assu m ed to be white Ga ussian noise with standard d eviation of 0.01. In spite of this c hange, the controller performance is acceptable and the effect of this variation on t he closed loop input is noticea ble. T he reference model poles are placed at 0.4 and 0 .2 0. 2 i Using (16) , the closed loop input w ill be as given by (22). ˆ ( ) ( ) 0.8 ( 1 ) 0.24 ( 2) 0.032 ( 3 ) ( 1 ) ( ) cm mm u k f k y k y k y k u k r k (22) In this example tracking error and control input depend on the choice of the poles of refere nce model and a s t he re ference model poles get closer to the o rigin, the co ntroller performance in trackin g improves whereas closed loop input tends to be oscillating which is undesirable hence there should be a trade- off b etween tracing error and the closed loop input smoothness. Fig.5 shows the system outp ut and the reference model output whereas Fig.6 an d F ig.7 are showing the closed loop input and basis function respectivel y. Fig.5. System output and the reference model output Fig.6. Closed loop input Fig.7. Basis functio n of example 2 From fig.4 and fig.7 it can be concluded that the measurement noise has direc t effect on the closed loop input and will make it to be oscillating. 6. CONCLUSION In this paper, ad aptive matching pursuit algorithm with wavelet base s was used for an on -line identificatio n and control o f nonlinear ti m e var ying system. T ime varying 0 20 40 60 80 100 -5 -4 -3 -2 -1 0 1 2 3 4 5 6 Output an d Desi red Output Ti m e( s) y y m 0 20 40 60 80 100 -3 -2 -1 0 1 2 3 T ime[s] in put 0 10 20 30 40 50 -3 -2 -1 0 1 2 3 4 Tim e[s] Output A nd De s i re d Output y y m 0 5 10 15 20 25 30 35 40 45 50 -1.5 -1 -0.5 0 0.5 1 In p ut 0 2 4 6 8 10 -1 -0.5 0 0.5 1 1.5 2 2.5 Time[s] first b asi s sec ond basis third b asis coefficients ar e set to slow and fast variations. Simulatio n results show that controller perfor m ance is acceptable even if model coefficients are time varying and have high variations as of exa m ple 2. it was als o shown that the variation of parameters will affect th e closed loop input, an d depending on the manner these par ameters are changed as well as the given nonlinear s ystem, a c hange is observed in the closed loo p inpu t and base o n the nonlinear system, the co ntrol input ma y became smaller o r greater. In the ca se of fast var ying coefficients, a great identification erro r occurs which in turn will lead to great change i n control input. REFERENCES Allgöwer.F and Zheng.A(2000) , No nlin ear Model Predictive Control. B irkhäuser , Basel. Findeisen.R and Allgöwer.F, An Introduction to Nonlinear Model Pr edictive Control , Benelux Meetin g on Systems and Control, Veidhoven Han.Min , G uo.Wei and Jincheng .Wang ( 2005) , “ Predictive control based on feed for w ard neural network for strong nonlinear s ystem ,” IEEE International J oint Conference on neural network , Vol: 4, pp:2266 -2271. Khodabandehlou H., Fadali M. S. (2016) , Networked co ntrol of unmanned veh icle using wavelet-based generalized predictive controller , Neural Networks (IJCNN) , 2016 International Joint Confere nce on, 5226 -5233 Khodabandehlou H. , Fadali M. S. (2017), A qu otient gradient method to train artificial neural networks, Ne ural Networks (IJCNN), 2017 International Joint Conference on, 2576 -2581 Zhang.Q , Benveniste. A (199 2) ,“ wavelet networks ,” IEEE Trans. Neural Net w orks vol: 3 , pp. 889 – 898 De Sousa. C, Hemerl y .Jr, Galvao.E.M, R.K.H(2002), Adaptive control for mobile rob ot using wavelet networks, IEEE Trans on Systems, Ma n, and Cybernetic s , Vol: 3 2, pp:493 -504 Zayeni.M , Noubari.H.A( 1995), “Nonlinear System Identification Using Radial Wavelet Networks ,” Paper presented at SIAM meeting, St. Louis, Miss. Yoo.S.J, Choi.Y.H, P ark.J.B (2 006) , “ Generalized Predictive Control B ased on Self-Recurrent Wavelet Neural Net w ork for Stable Path Tracking of Mobile Robots: Adaptive Learnin g Rates Approach ,” IEEE Tr ans on cir cuits and systems -I: regular papers, vol. 53, No. 6 , pp.1381 -1394 Shmilovici.A, Maimon.O (19 98), Application of adap tive matching p ursuit to adaptive control o f nonlinear dynamic systems, IEEE Proceedings - Vol 145, I ssue 6, p p:575 – 581 Mallat. S. G (1998) , A W avelet T our of Signal Processing, Academic Press, San Die go Ljung .L , Pr iouret.P (2007) , “Remarks on the mean square tracking error ”, International Journal of Adaptive Control and signal processin g, Vol 5, pp:395 -403,
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment