Enhanced C-V2X Mode-4 Subchannel Selection
In Release 14, the 3rd Generation Partnership Project (3GPP) introduced Cellular Vehicle--to--Everything (C-V2X) \textit{mode-4} as a novel disruptive technology to support sidelink vehicular communications in out--of--coverage scenarios. C-V2X \text…
Authors: Luis F. Abanto-Leon, Arie Koppelaar, Sonia Heemstra de Groot
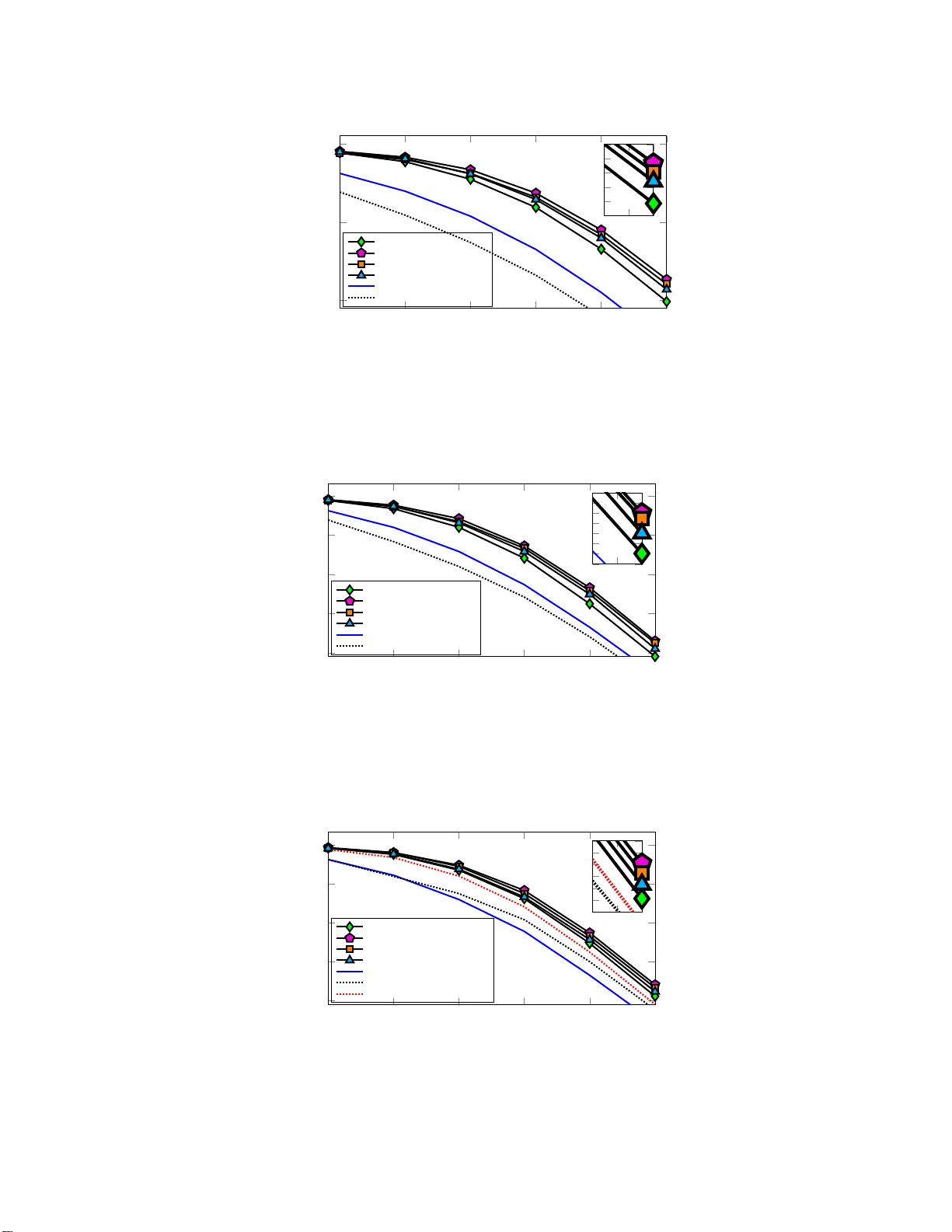
1 Enhanced C-V2X Mode-4 Subchannel Selecti on Luis F . Abanto-Leon † , Arie K oppelaar ‡ , Sonia Heemstra de Groot § † § Eindho v en Univ ersity of T echnology ‡ NXP Semiconductors † l.f.abanto@tue.nl, ‡ arie.koppelaar@nxp.com, § sheemstradegroot@t ue.nl, Abstract In Release 14, the 3rd Generation Partnersh ip Project (3GPP) introduce d Cellular V ehicle–to– Everything (C-V2X) mode-4 as a n ovel disrup tiv e technology to suppor t sidelink vehicular comm u- nications in out–of–coverag e scenarios. C-V2X mode-4 has bee n engineered to o perate in a distributed manner, wherein vehicles autonomou sly monitor the received po wer across sidelink su b channe ls before selecting one for utilization. By me a ns of such an strategy , vehicles attempt to ( i ) discover and ( ii ) reserve subchan nels with low interferen ce th at may have the poten tial to max im ize the reception likelihood o f their own broad casted safety messages. Howe ver , d ue to dy namicity of th e vehicular en vironm e nt, the sub c hannels optimality may fluctuate rapid ly over time. As a con sequence, vehicles are required to make a ne w selection ev ery few hun d reds of millisecond s. I n consonan ce with 3GPP , the subch annel selection phase relies o n the linear average of th e perceived power intensities o n each of the subchann els durin g a mo nitoring win dow . Howe ver , in this paper we p ropose a nonlinear p ower av eraging phase, where th e most up–to–da te measurements are a ssigned h igher prio rity via exp o nential weighting. W e show thr ough simu lations that the overall system per forman ce can be lev eraged in b oth urban an d f r eew ay scenarios. Fur thermor e, th e linear averaging c an be consid e r ed as a special case of the expo nentially-we ig hted moving average, ensuring b ackward comp atibility with the stand ardized method. Finally , the 3GPP mode-4 sched uling approa ch is described in detail. Index T er ms semi-persistent scheduling , vehicular c ommun ications, mod e-4, sidelink, L T E-V , C-V2X I . I N T RO D U C T I O N Cellular V ehicle–to–Everything (C-V2X) comm unications is on e of the nov el p aradigms in- troduced by t he 3rd Generation Partnership Project (3GPP) [1] in Release 14. C-V2X com- 2 munications has been devised to be a dependable technology with t h e capabili ty of displaying robustness in highly dynamic vehicular scenarios with v arying densities, w h ile s atisfying stringent latency and reliability requirements. Thus, C-V2X has t he potential to become a prop itious asset that can be advantageously exploited in sev eral application areas. For instance, vehicles with communication attributes may assis t in pre venting accidents and reducin g the number of casualties [2]. Sim ilarly , these communicatio n s capabil ities can als o be harnessed to optimize road traffic flow , which is anticipated to produce a plethora of posit iv e im pacts across se veral dimensions . W it hin C-V2X, two operation m o dalities are described: mode-3 and mode-4 [1]. T h e former one is a centralized scheme that relies on the a vailability of cellular infrastructure such as eNodeBs in order to distribute the av ail able sidelink subchannels am o ng the vehicles in coverage. eNodeBs may pursue m ultiple different criteria to accompl ish such an objective . For in s tance, [3] con s iders a single sub-band setting where a sequential heuristic approach is proposed in order to maximize the reuse distance among vehicles broadcasting in the same subchannel, and thus leading to co-channel interference (CCI) reduction. On the other hand, [4] describes a multiple sub-band settin g where maximization of the system sum-capacity i s sought based on the s ubchannels signal–t o –interference–plus–noise ratio (SINR) th at vehicles report to eNod eBs. Furthermore, [5] extends the previous work i ncluding additional constraints where differentiated QoS requirements per vehicle are considered. Regardless of t he optimization criteria, once an eNodeB has comput ed a suitable di stribution of subchann el s , vehicles will be notified of the resul- tant allocation via downlink. T hereupon, vehicles will engage in sidelink direct commun ications with their counterparts using the allotted resources. Contrasting ly , mode-4 has been devised to operate in the absence of network cov erage. In particular , such kind of si t uations might arise when cellular infrastructu re h as not been deployed i n the area o r when network coverage is not reliable enough to reckon on. As a consequence, vehicles will hav e to monit or the recei ved powe r intensity on each subchannel and select a suitabl e one for utilization. Expressly , a vehicle will self-allocate a subchannel which may be uno ccupied or experiences low interference in order t o improve the li kelihood of its o wn transmitted messages being received reliabl y . Although diffic ult to guarantee as a result of ( i ) t he di stributedness of the scheme and ( ii ) th e unpredictabil ity of channel fluctuations in the en vironment—by means of such an strategy of sensin g before selecting —not only do vehicles attempt to improve the reception probability of their messages but also strive not to impin g e on the condit i ons of other subchannels being reserved by neigh b oring 3 vehicles. In this m anner , every vehicle in t h e s ystem continuousl y endeav ors to m aintain an equilibrium point where interference can be min imized. The com parativ e advantage of m ode-3 i s t h e m o re efficient uti lization of sub channels that can be attained as a consequence of the hum ongous knowledge t h at eNodeBs can coll ect from all vehicles in cover age. Therefore, conflict-free subchannel assign m ents with minim al interference are realizable. Non etheless, sig naling between vehicles and eNodeBs via upl i nk/downlink consti- tutes a challenging task in terms of the rigorous latency exigencies that are required. Con versely , in mode-4 there is n o n eed of a central controller t o dictate assignments and therefore lat ency due to data collection is non existent . A noticeable drawback of mode-4 is the restricted local knowledge of each vehicle, which m ay cause the most satisfactory subchannels not to be alwa ys selected. Furthermore, due to incoordin at i on, se veral vehicles may compete over the same subset of su b channels, and therefore leading to persistent con flicts and seve re packet receptio n ratio (PRR) degradation. In order to dimin i sh the occurrences of conflicts, 3GPP st andardized a semi-persistent schedul- ing (S PS) scheme whereby vehicles can reserve subchannels on a quasi-steady basis —in the order of a fe w hundreds o f mill iseconds—unti l re-scheduling is requi red. Thus , any recei ving vehicle is capable of acqui ri n g a degree of understanding on the s ubchannels util i zation since short- term predictabilit y is presumed. In dense scenarios, howe ver , most of t h e subchannels mig h t be u nder u tilization and therefore vehicles must guide their selection based on the recei ved power intens ity , i . e. potential interference. When t h e reservation period of a su b channel has expired, a vehicle may h ave to process a new selection. Th is procedure consists in ( i ) monitorin g the recei ved power on every subchannel during an observ ation wi n dow; ( ii ) performing linear power ave raging over such measurements in order to synthesi ze a metric representative of the interference level per subchannel; and finally ( iii ) randomly s electing a subchannel amo n g the best candidates. It has been proved by 3GPP thro u g h extensive sim ulations th at such an strategy is consistent and robust enough to provide a fair basis of knowledge for vehicles to make a con venient selection while reducing the am o unt of concurrent conflicts. Gi ven the necessity of further boosting reception reliabilit y of m ess ages, we prop ose a slight modi fication i n the subchannel selection stage. Instead o f relying on p ower linear aver aging [1], in the proposed approach t h e m ost recent m easurements—withi n the observation wi ndow—are prioritized with higher weighting fac tors whereas recei ved power intensit i es collected earlier in time are assig ned lesser va lues. T o wi t , the most up-to-date values are more relev ant for s u bchannel selection as 4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . T w = 1 00 (m s) time wind ow t − 11 T w = 1 00 (m s) time wind ow t − 10 T w T w T w = 1 00 (m s) time wind ow t − 1 T w = 1 00 (m s) time wind ow t T S P S . . . selection window po wer averaging ov er the last 1000 ms SPS transmission in subchannel s (2 , 3) SPS transmission in subchannel s (2 , 3) SPS transmission in subchannel s (2 , 3) ne w SPS transmission in subchannel s ( f ,k ) CAMs are receiv ed and po wer is sensed CAM is t r ansmitted CAMs and power cannot be recei ved due to HD limitation pack et genera tion ev ery 10 0 ms Fig. 1: C-V2X m ode-4 scheduling these are representativ e of the current and short-term future util ization patterns. In addition , an optio nal feature allows vehicles to o mit re-scheduling and reselect t he currently reserved subchannel with some probability [6] [7]. W e show throu gh simulatio ns that this profile attribute perfectly dovetails wit h the introduced exponentially-weight ed moving ave rage and can further boost the overall performance of the whole system. The paper is structured as follows. In Section II, the 3GPP SPS scheduling scheme for mo de-4 communication s is explained in detail. Section III d escribes the proposed exponential weighting var iant for power av eraging. Section IV is dev oted to discussing s imulation resul t s obtained from real vehicular traces. Finally , Section V summarizes the conclus ions of our work. I I . 3 G P P M O D E - 4 W e hav e considered a 10 MHz in t elligent transp ortation sys tems (ITS) channel for exclusive support of si d elink vehicular communi cations. Th us, the whole channel is divided i nto sev eral time-frequency resource partitio ns—hereinafter called sub channels. Each has dim ens ions of one subframe (1 m s) in time and a numb er of resource blocks (RBs) in frequency . A s u bchannel i s assumed to be capable of carrying a cooperative aw areness message (CAM) and consi s ts of two main compon ents: data and cont rol. The former one is also k n own as transport block (TB) and carries impo rt ant i n fo rm ation of each vehicle, e.g. positi on, s peed, directio n , etc. [8]. Th e latter portion is known as sidelink control informati on (SCI) [1] and t ransports relev ant parameters— such as modulatio n and coding scheme (MCS), t he number o f resource blocks per subchannel, 5 ε ( n,f ,k ) i = X j = { u | v u ∈V ( n,k ) } u 6 = i I p P j G t · G r X ( n ) ij · P L ( n ) ij + P σ , if k = { m | S ( n ) i ∩ { s (1 ,m ) , s (2 ,m ) , . . . , s ( F, m ) } = ∅} ∞ , otherwise (1) priority of the message, etc.—that will be employed for TB decoding and s cheduling. In th i s work we have assumed a nomin al m ess age rate of ∆ C AM = 1 0 Hz for all the vehicles in t he system, and therefore t he maximum amount o f time divisions is 100. When a vehicle self-allocates a subchannel in a semi-persistent manner , it will p eriodically broadcast on such resource d u ring T S P S ms, upo n whose termination a new reserv ation will be required. For instance, Fig. 1 depicts the transm ission and reception instances from a si ngle vehicle perspectiv e. It can be not i ced that subchannel s (2 , 3) —located at the i ntersection of sub-band f = 2 and subframe k = 3 —is being persistently utilized ev ery T w ms and such reserv ation pattern remains unchanged during T S P S /T w consecutiv e time wind ows. Then—at the packet generation instance in the last reserved time wi ndow t − 1 —the vehicle s elects its next SPS s u bchannel. In the following, we proceed to d escrib e th e 3GPP mod e-4 scheduling scheme in more detail. A. Stage 1: P ower Sensing W it hin a 10 MHz ITS channel, there exist F sub-bands adjacent in frequency . Let s ( f ,k ) denote the s ubchannel in sub-band f (for f = 1 , 2 , . . . , F ) and subframe k (for k = 1 , 2 , . . . , 1 00 ) as depicted in Fig. 1. Thus, S = { s (1 , 1) , s (1 , 2) , . . . , s ( F, 100) } represents th e complete set of |S | = 100 F subchannels for allocation. Sin ce the value of T S P S = { 5 00 , 600 , . . . , 15 00 } i s randomly drawn by each vehicle from a set of predetermined values [6], the reserv ation period changes on a per vehicle basis, thus contributing to decorrelating the schedulin g procedure among vehicles. During any specific time window n , a vehicle v i is persistently transmitt ing a CAM message of size M C AM bytes on a determined s ubchannel. Due to half-duplex PHY assumption, vehicle v i will be able to either transmit or receiv e at a t i me. Thus, as illustrated in Fig. 1, th e CAM messages i n some subchannels and therefore their power intensiti es will not be recei ved by the vehicle. L et ε ( n,f ,k ) i denote the recei ved power perceived by vehicle v i on a RB belong i ng 6 to subchannel s ( f ,k ) at any time window n . The power is comput ed as shown in (1) 1 , where V ( n,k ) represents th e set o f all t he vehicles v j broadcasting on subchannels of sub frame k in time window n . On the other hand, S ( n ) i denotes the subset o f s u bchannels that vehicle v i is utilizi n g in t he current s ubframe n 2 . Note from (1) t h at e very subchannel belongi ng to a subframe—where vehicle v i has broadcasted—has had it s power int ens ity set to ∞ . The reason to this procedure is that the power could not be sensed due t o half-duplex limitati ons and in order to preclude the sel ecti o n of subchannels in unmo n i tored sub frames, such power leve ls were assigned h i gh values. The no rm alized RB t ransmit power of vehicle v j is represented b y P j = P T , which is assumed to be the same for all units . Th e antenna gains of the transmit ter and recei ver are G t and G r , respectiv ely . The parameter X ( n ) ij is a log-normal random variable wit h standard deviation X σ representing the shadowing experienced by the lin k between vehicles v i and v j at time window n . In addi t ion, P L ( n ) ij = max { P L ( n, free-spac e ) ij , P L ( n,B 1 ) ij } depicts the path loss between v i and v j . The first term represents the power att enu at i on based on the free-space model whereas the second term has been comput ed according to WINNER + UMi (B 1 ) [9] specifications. P σ represents th e norm al i zed noise floor per RB. I p is a factor that represents the influence of either co-channel interference (CCI) or in -band emissions (IBE) contributed by the any vehicles using subchannels of subframe k . I p is defined as the element in positi on | p − f + 1 | of a vector I , where p = { ˜ f | s ( ˜ f ,k ) ∈ S j } . Th e elements of vector I represent the average energy l evel leaked from adjacent subchannels. For inst ance, in a configuration wi t h F = 3 sub-bands, I = [1 0 . 0 047 0 . 0015] whereas for F = 4 , I = [1 0 . 0047 0 . 0 015 0 . 0 005] . In-band emissions , path-loss and correlated shadowing hav e been modeled as specified in [10]. Thus, t h e av erage power ˜ ε ( n,f ,k ) i percei ved by vehicle v i at t ime win d ow n is com puted on the basis of measurements during the pre vious 10 time windows { n − 1 , n − 2 , . . . , n − 1 000 } —i.e. a total o f 1000 m s—where each subchannel will be a veraged over 10 power sampl es. B. Stage 2: Subchannels Cate gorization Some subchannels wil l be e xcluded from selection based on the intensity of the (linear) a ve rage recei ved power —obtained from t he reference signals o f the TB. Th u s, if the average PSSCH- 1 It is important to specify that the received po wer in this stage is calculated considering only the RBs pertaining t o the reference signals within the T B. This metric i s referred to as P hysical Sidelink S hared Channel - Reference Signal Receiv ed Power (PSSCH-RSRP). 2 The nu mber of subchannels utilized by each vehicle can be 1 or 2 depen ding on whether retransmissions are enabled or not. 7 RSRP over the past 1000 ms exceeds a certain threshold γ RS RP 3 , those subchannels will be excluded as candidat es for the new scheduling process . At this st age, the subchannels whose power coul d not be moni tored, ha ve been implicitly e xcluded as their power was set to ∞ . If after this stage, the amount of allotable subchannels is less than 20% of the initial number |S | = 1 00 F , the threshold γ RS RP is incremented by 3 dB and this process is iteratively repeated until the number of candidate s ubchannels is at least 0 . 2 | S | . By means of increasing the threshold, the optimalit y of the candi d ate subchannels for scheduling is progressiv ely relaxed. Thus, a vehicle becomes m ore permi s siv e in in cluding su b chann el s with slig h tly higher interference lev el at t he expense of increasing the cardinality of the candidate s et. C. St age 3: Sub channel Selection Once the num ber of candidate subchannels is at least 0 . 2 |S | , each vehicle v i will rank the subchannels in ascending o rder based on the linear a verage Received Signal Strength Indicator (RSSI)—which is computed across all the RBs of each subchannel. Thus, the selecti on process consists on each vehicle v i creating a set with the best 2 0 F subchannels and th en randomly choosing o n e for SPS transm ission. In addit ion, an opt ional feature allows th e vehicle—with probability p k eep —to sk ip re-scheduling and maintai n the current subchannel [6] [7]. In such a case a new T S P S value wi l l als o be drawn. I I I . E X P O N E N T I A L L Y - W E I G H T E D M OV I N G A V E R A G E This procedure is applied to both Stages 2 and Stage 3 , i. e. for PSSCH-R SRP and RSSI a veraging. Al though the linear average can provide a reliable impression of th e interference degree, it has been noti ced that by prioritizin g the mo s t recent measurements with higher weighting values, th e performance of the system can be improved. T hus, the aver age received power of a RB—belonging to subchannel s ( f ,k ) —at time window n is computed employing the exponentially-weighted measurements over the l ast 10 t ime w i ndows, as shown i n (2) ˜ ε ( n,f ,k ) i = " 10 X l =1 α l # − 1 10 X l =1 α l ε ( n − l,f ,k ) i , (2) where α ≤ 1 is an exponential weighting factor . When α = 1 , the procedures in S tage 2 and Stage 3 remain u naltered since the s tandardized linear average will be computed. 3 This threshold is obtained considering the prioriti es of the CAM messages receiv ed in the subchan nels and the priority of the message to be transmitted by v i . In this work, we hav e assumed that the priority for all the messages is uniform and equal to 0. Thus, based on [7], γ RS RP = − 128 dBm. 8 I V . S I M U L A T I O N S In t his section, we compare the standardized 3GPP schedul ing m ethod against t he p roposed var iant. W e e v aluate t wo classes of vehicular scenarios— urban and freew ay—and assess th eir performance in terms of the PRR us i ng MA TLAB. In addition , inspired by [11], the types of error causing mi ssed or undecodable packe ts are classified. For t he urban case, a high vehicle density re gion of the T AP AS Cologne database [12] was cho s en, where an av erage number of 2000 vehicles over 60 seconds was observed. For the free way case, a total number of 600 vehicles—distributed among 2 groups of 3 l anes per direction— with a verage density of 100 vehicles per kilo m eter was generated using Poisson poin t processes. In addi t ion, the relev ant parameters for the experiments are shown in T able I. T ABLE I: Simulation parameters Descripti on Symbol V alue Units Number of RBs per subchannel (pe r subfra me) - 30 - Number of sub-bands F 3 - Number of subchannel s per sub-ba nd - 100 - Number of subchannel s - 300 - CAM message rate ∆ C AM 10 Hz CAM siz e M C AM 190 bytes MCS - 7 - Tra nsmit po wer per CAM - 23 dBm Tra nsmit po wer per RB P T 6.67 mW Effe cti v e coded throughp ut (24 CRC bits) ρ 0.9402 bps / Hz Throughput loss coef ficient [13] λ 0.6 - SINR th reshold γ T 2.9293 dB Distance be tween T x and Rx D x 50-300 m Scheduli ng period [7] T S P S 0.5-1.5 s Antenna gai n G t , G r 3 dB Shado wing standa rd de viat ion X σ 7 dB Shado wing corre lation distanc e - 10 m Fig. 2 and Fig. 3 compare the performance of the two approaches in a urban scenario with p k eep = 0 . T h e type of PRR shown in Fig. 2, i.e. PRR disk , represents th e m ainstream metric that counts all the s uccessfully decoded packets consid ering e very vehicle wit hin a di s k of radius D x from t h e transmitter . The second m etric, namely PRR ring , considers on l y the vehicles located in t he ring between D x and D x − 50 . Thi s latter m etric was introduced by 3GPP in [10] 9 50 100 150 200 250 30 0 0.8 0.9 1.0 D x [meters] Pack et Reception (PRR disk ) 3GPP / α = 1 Proposed / α = 0 . 4 Proposed / α = 0 . 6 Proposed / α = 0 . 8 3GPP - Random / α = 1 3GPP - Greedy / α = 1 280 290 300 0.79 0.80 0.81 0.82 0.83 0.84 Fig. 2: PRR disk for an urban scenario with p k eep = 0 50 100 150 200 250 30 0 0.6 0.7 0.8 0.9 1.0 D x [meters] Pack et Reception (PRR ring ) 3GPP / α = 1 Proposed / α = 0 . 4 Proposed / α = 0 . 6 Proposed / α = 0 . 8 3GPP - Random / α = 1 3GPP - Greedy / α = 1 280 290 300 0.58 0.59 0.60 0.61 0.62 0.63 0.64 0.65 Fig. 3: PRR ring for an urban scenario with p k eep = 0 50 100 150 200 250 30 0 0.6 0.7 0.8 0.9 1.0 D x [meters] Pack et Reception (PRR ring ) 3GPP / α = 1 Proposed / α = 0 . 4 Proposed / α = 0 . 6 Proposed / α = 0 . 8 3GPP - Random / α = 1 3GPP - Greedy / α = 1 3GPP / α = 1 ( p keep = 0 ) 280 290 300 0.60 0.61 0.62 0.63 0.64 0.65 0.66 Fig. 4: PRR ring for an urban scenario with p k eep = 0 . 2 10 in order to ev alu at e the performance of a specific tar get grou p . In addition, the performance curves for greedy and random selection hav e been included. In the former case, sev eral vehicles experiencing sim i lar su b channel cond i tions m ay un knowingly select the same resources; thus leading to an increased am ount of collisi ons. In t he latt er case, the quantity o f packets colliding decreases since the whole set of candidate subchannels is S . Nev ertheless, subchannels with high interference may be selected and thus impingi n g o n the PRR. The performance of bo th rando m and greedy approaches i s suboptim al com p ared to t he stand ardized metho d. On the other hand, we can observe that the proposed variant can produce PRR im provement in t h e near- field and far -field of each transmittin g vehicle. This behavior is ob served in bo th kinds of PRR, where the g ain s for α = 0 . 4 at D x = 300 are 2.82% and 3.98 %, respective ly . It was ob s erved that values small er than 0.4 tended to decrease performance, to extents lower than when α = 1 . Fig. 4 shows th e PRR ring performance when p k eep = 0 . 2 . It can be observed that this opti onal feature has t he potential t o b o ost the performance wh en compared to th e case wi t h p k eep = 0 . Howe ver , wh en p k eep > 0 . 2 t he dynamism du e subchannel allo cati o n changes is ins u fficient and therefore the PRR suf fers de gradation due to stasis. Furthermore, the propo sed approach dov etails suitably with parameter p k eep and their join t u tilization is adva ntageous for enhancing th e system performance. It can also be noticed that the random allocatio n is unaff ected by p k eep whereas the greedy selection is greatly benefited t o th e extent th at it s urpasses t he former approach. The packet errors have been classi fied in sev eral categories as shown in T able II and T able III. In order of hi erarchy , the fol lowing mut ually exclusiv e classes are recognized: ( i ) half-duplex impairment at s ubchannel level (HD-SC); ( ii ) half-dupl ex impairm ent at su b frame level (HD- SF); u n d ecodable packets due t o ( iii ) propagation, ( iv ) co-channel interference and ( v ) in-band emissions. Basing our observations on PRR ring , in urban scenarios the most detrimental cause for lost packets is CCI while IBE and propagation are responsible for most of the remainin g errors. Unrecei ved p ackets due to half-duplex (HD-SC and HD-SF) amount l ess than 1%. On the o ther hand—in t h e freew ay scenario—because t he channel parameters have not been changed with respect to the urban case, we can observe a si milar amount of lost packets due to propagati o n. Howe ver , in this case CCI is more relev ant since the di stribution of vehicles i s m ore condensed; therefore the s ubchannel reuse distance among vehicles is shorter t h an in th e urban scenario. As a consequence of vehicles being closely packed, the power leakage due to IBE is also more impactul and affects t h e PRR com parativ ely more se vere than in the urban case. Note: Across all the sim u lations, t he PRR is computed checking whether every pair of vehicles 11 T ABLE II: Classification in percentage of missed/un d ecodable packets - Urban scenario with α = 1 and p k eep = 0 Distance PRR HD-SF HD-SC Propagation CCI IBE PRR HD-SF HD-SC Propagation CCI IBE (Disk) (Disk) (Disk) (Disk) (Disk) (Disk) (Rin g) (Ring) (Ring) (Ring) (Ring) (Ring) 50 98.8194 0.1262 0.1050 0.0000 0.8664 0.0830 98.8194 0.1262 0.1050 0.0000 0.8664 0.0830 100 97 .7037 0.2167 0.1093 0.0031 1.5919 0.3753 96.7375 0.2952 0.1131 0.0058 2.2195 0.6289 150 95 .4630 0.3354 0.1076 0.0799 2.9353 1.0788 91.9840 0.5197 0.1036 0.1990 5.0226 2.1711 200 91 .8708 0.4291 0.1025 0.6057 5.0871 1.9048 84.0963 0.6320 0.0916 1.7436 9.7441 3.6924 250 86 .5511 0.5163 0.1017 2.3065 7.8852 2.6392 72.4718 0.7469 0.1005 6.8081 15.2899 4.5828 300 79 .8627 0.5623 0.1148 5.5492 10.7124 3.1986 59.0403 0.7051 0.1553 15.6443 19.5148 4.9402 T ABLE III: Classification in percentage of mi s sed/undecodable packets - Freewa y scenario wit h α = 1 and p k eep = 0 Distance PRR HD-SF HD-SC Propagation CCI IBE PRR HD-SF HD-SC Propagation CCI IBE (Disk) (Disk) (Disk) (Disk) (Disk) (Disk) (Ring) (Ring ) (Ring) (Rin g) (Ring) (Ring) 50 97.8500 0.0911 0.2265 0.0000 1.5033 0.3291 97.8500 0.0911 0.2265 0.0000 1.5033 0.3291 100 94 .8317 0.0940 0.4026 0.0032 3.2755 1.3930 93.1256 0.0957 0.5021 0.0050 4.2773 1.9943 150 91 .2680 0.0999 0.4870 0.0611 5.2521 2.8318 84.4430 0.1113 0.6486 0.1721 9.0375 5.5875 200 87 .1069 0.1088 0.5463 0.4599 7.4548 4.3233 73.9374 0.1369 0.7341 1.7222 14.4259 9.0434 250 82 .6517 0.1193 0.5834 1.5996 9.4906 5.5553 62.7991 0.1661 0.7489 6.6780 18.5624 11.0456 300 78 .0224 0.1350 0.6020 3.6732 11.1518 6.4157 51.2963 0.2256 0.7088 15.6445 20.7422 11.3826 v i and v j is within the awareness distance D x or not. If af firmativ e, the SINR γ ( f ,k ) ij experienced by v i upon reception of a packet transmitt ed by v j on subchannel s ( f ,k ) is compared against a threshold γ T = 1 0 · log 10 (2 ρ/λ − 1) [13], which is derive d from th e parameters in T able I. It is assumed that a mes s age can be correctly decoded if its SINR is larger than γ T . V . C O N C L U S I O N W e h a ve proposed an alternative to the stand ardi zed linear po wer av eraging procedure—for PSSCH-R SRP and RSSI resource blocks— which has shown a positive im pact in terms of PRR performance. In additi on, we have shown through simulations that in two different en vironments, namely urban and freew ay , the proposed variant is capable of excelling the standardized method. It shoul d be noted that such a gain is only due to an improved management of subchannel selection in the schedul ing procedure si nce no oth er features su ch as congesti on control were introduced. For this reason, we foresee the potential of t h is modification to be combin ed wi t h 12 more advanced processes and functionalities. In addition, the propo s ed technique can be adaptive and tune i ts o wn parameters based on the sensed subchannels congestion. R E F E R E N C E S [1] ”3GPP TS 36.213; T echnical Specification Group Radio Access Network; Evolv ed Univ ersal T errestrial Radio Access (E-UTRA); Physical l ayer procedu res; (Release 15) V15.0.0, ” December 2017. [2] ”Crash Data Analyses for V ehicle-to-Infrastructure Communications for Safety Applications, ” FHW A-HR T -11-040, No vem- ber 2012. [3] G. Cecchini, A. Bazzi, B. M. Masini, A. Zanella, ”Localization-Based R esource Selection Schemes for Network-Controlled L T E-V2V , ” IEEE ISWCS 2017, August 2017. [4] L . F . Abanto-Leon, A. K oppelaar , and S. M. Heemstra de Groot, ”Graph-based resource allocation with conflict av oidance for V2V broadc ast communications”, IEEE PIMRC 2017 , October 2017. [5] L . F . Abanto-Leon, A. K oppe laar , and S. M. Heemstra de Groot, ”S ubchann el Allocation for V ehicle–to–V ehicle Broad cast Communications in Mode-3, ” IEEE WCNC 2018, April 2018. [6] ”3GPP TS 36.321; T echnical Specification Group Radio Access Network; Evolv ed Univ ersal T errestrial Radio Access (E-UTRA); Medium Access Control (MA C) protocol specification (Release 15), ” December 2017. [7] ”3GPP TS 36.331; T echnical Specification Group Radio Access Network; Evolv ed Univ ersal T errestrial Radio Access (E-UTRA); Radio Resource Control (RRC); Pr otocol specification (Release 15), ” January 2018. [8] ”E T SI TR 102 861; Intelligent Transp ort Systems (ITS); STDMA recommended parameters and settings for cooperati ve ITS; Access Layer Part, ” January 2012. [9] J. Meinila, P . Kyosti, L. Hentil a, T . Jamsa, E. Suikkanen , E. Kunnari, and M. Naran dzic, ”D5.3: WINNER+ Final Chan nel Models, ” Wireless W orld Initiativ e New Radio, CEL TIC CP5-026, June 2010 . [10] ”3GPP TR 36.885; T echnica l Specification Group Radio Access Net work; St udy on L TE-based V2X Services; (Release 14), ” June 2016. [11] R. Molina-Masegosa and J. Gozalvez, ”System Le v el Evaluation of L TE-V2V Mode 4 Communications and Its Distributed Scheduling, ” IEE E VTC Spring 2017, June 2017. [12] ”T AP ASCologne Project, ” a v ailable at http:/ /kolntrace.pro ject.citi-lab.fr/ . [13] A. Bazzi, B. Masini, A. Zanella, and I. Thibault, ”On the Performance of IEEE 802.11 p and L TE-V2V for the Coo perativ e A wareness of Connected V ehicles, ” IEE E Transactions on V ehicular T echnology , V ol. 66, No. 11, pp. 10419-1043 2, Nov ember 2017.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment