Prevention of Metro Rail Accidents and Incidents in Stations Using RFID Technology
Today, metro is one of the urban infrastructure and plays an important role in urban transport. The safety and health of people in a city are always important, and transport in the metro should also be safe. When subway trains operate, it is possible…
Authors: Farshid Sahba, Ramin Sahba
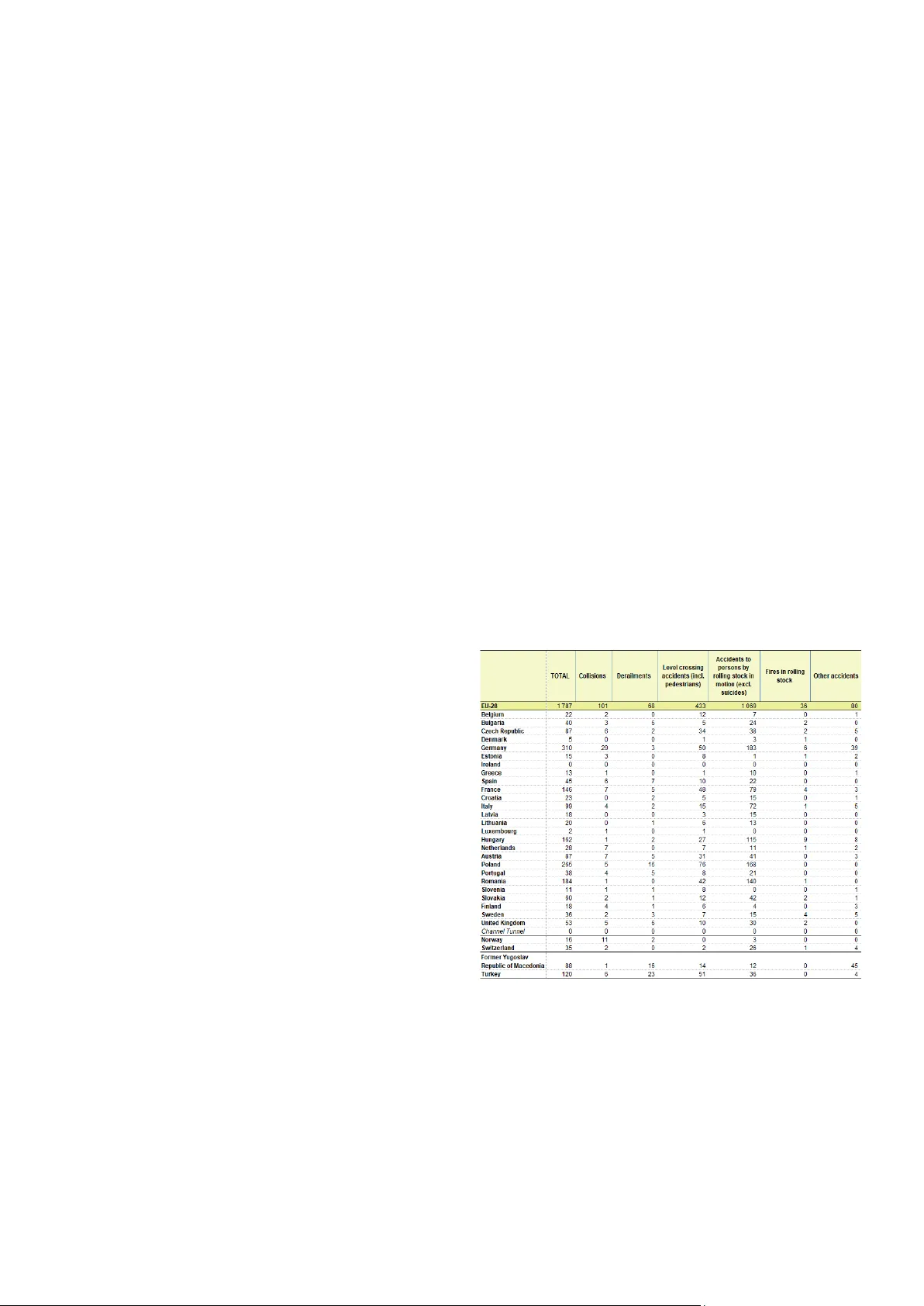
Prevention of Metro Rail Accidents and I ncidents in Stations Using RFID Technology Farshid Sahba Institute for Informatics a nd Automation Prob lems National Academy of Science s of Armenia Yerevan, Armenia f_sahba@yahoo.co m Ramin Sahba Department of Electrical and Computer Engineeri ng The University of Texas at Sa n Antonio San Antonio , T X, USA ramin.sahba@utsa.edu Abstract — Today, m etro is one of the urban infrastructure and plays an important role in urban transport . The safety and health of people in a city are alw ays important, and tr ansport in the metro should also be safe. When subway trains operate, it is possible t o occur various a ccidents such as an exit from the rails or collision with a possible obstacle on the rails (human or another train). I n this paper, a model is pro posed based on RFID technology in which the train is equipped w ith a RFID reader, and a co ntrol circuit w ith a microcontroller as w ell as placing RFID active tags at specific points of the path. When t he train approaches t he tagged points of th e route, the train tag reader scans the tag number, a nd then the microcontroller identifies t he status of the environ ment by retrieving the information from t he internal database. Then, the control circuit adjusts the rotational speed of the electric motor and the train speed consequently based on that data. In this w ay, the speed of the train is adapted automatically and promptly to the conditions and the probability of an accident in unforeseen circum stances is reduced . Keywords — Metro rail system; Metro rail accident; RFID; RFID Tag; RFID Reader I. I NTRODUCTI ON Today, m etro trains are among the most im portant and m ost used vehicles in urban transpo rt. Every day, millions o f people in metropolitan cities around the w orld use metro, and th e safety of this large population is very important when using metro . From time to time, there are horrific in cidents in m etro stations or metr o lin es, and a sy stem that can reduce th ese incidents and increase the safety of metro p assengers is very useful and essentia l. In the near future, the railw ay industry will rely more on tr ansportati on systems eq uipped with smart technol ogies [1] . These smart technol ogies will bring more safety to the train s and the passengers. Radio Frequency Identificati on (RFID) and Wireless Senso r Networks (WSN) are parts of these technologi es. RFID he lps to d etect p resence and locati on of objects, and W SN hel ps to sense and monitor the environm ent [2]. [3] descri bes a WSN architec ture for secu re railw ay s. The proposed sy stem identifies spoil age on railw ays using accelerati on measuremen t and ultrasounds. Researchers in [4 ] propose a system for early earthquake detec tion based on WSN for use in high-speed railway s. [5] presents another system that utilizes electrom agnets and im age processing to detect objects on the railroads. [6 -8] use RFID to secure and control som e other sy stems. In this p aper, we present a model in wh ich several ty pes of RFID r eaders and RFID tags have been use d to reduce t he frequency of station and r ail ac cidents . Accordin g to official news and reports, there have been several terrible r ailroad incidents in the world. Table 1 show s the number o f rail accidents, by ty pe of accide nt, in Europe in 20 16 [9]. The model presente d in this article has been developed for dealing with comm on types of train incidents including collision with human, collision with another train, and running off the r ails (derailm ent) [ 10 -14]. Table 1. Number of rail a ccide nts, by type of a ccident, in Europe in 2016 [9 ] II. M ODELING The subw ay train is a vehicle on the rails , and the most important parameter for controllin g this vehicle is its speed. This speed is between zero and 200 km/h, and the speed paramete r m ust be chan ged appro priately at th e sta tion, t he This paper p resented at 12th Inter national Sy mposium on I ntellig ent Automation and C ontrol, World Automation C ongress 201 8 , Stevenson, Washington, USA , Ju ne 201 8. curves, the straight path, the slopes , and w hile facing possible obstacles [1 5-18]. The speed is directly proportion al to the motor rotati onal spee d, so by controllin g the rotational speed of the electri c motor and, therefore , the vehicl e speed, it is possible to control the train to prevent possible acciden ts [1 9, 20 ]. Fortunate ly, locom otives of metro trains have elect ric motors, so it is possible to control the rotational speed of the electric motor using a co ntrol circuit equipped with a processor [ 21 ]. The process or must de cide on the received data from the environm ent and set the rotati onal speed of the ele ctric m otor based o n that. In the propose d model of this paper, we install RFID act ive t ags in the physical envi ronment of th e metro system , especially the haz ardous points of it, and equip the front part of the train with an RFID r eader to r eceive data from the envir onment. The RFID reader then, when the train moves on the rails and approaches the hazardous points of the path, reads the number in the tag and sends it to t he processor . T he processor finds out the status of the environment b y accessi ng data in a predefine d database stored in the ROM, and adjusts the rotati onal speed o f the electric motor based on that. Hazardous p oints inclu de curves, stati ons, slopes, and obstacles (hum ans or other trains ). RFID activ e tags w ill be installe d on the tunnel walls, curves, slopes, the stations and the exterior part of the body of the rear wagons . For the p asseng ers, the tag can be placed in the mobile phone, smart watch , smart card or wristband . In Figure 1, the statu s of the rails, the train , and th e tags in a curve, the station, and confrontat ion with a p ossible obstacle are schem atically show n. In addition to essentia l hardw are infrastructu re, this sy stem requires well designed software to manage and control the situation [ 22 -29]. T he software is implemente d and run in the system processor and determine how the processor commands control th e elect ric m otor of th e tra in. Fig. 1. statu s o f the rails, the train , and the tags in a curve , the station, and c onfrontati on with a possi ble obst acle In the first algorithm , when the train reaches sloping routes (uphill or downhill), the rotational speed of the electric motorincr eases or decreases based on the conditions . The pseudocod e of this algori thm is show n in Figure 2. void Slope_Resolver() { cin>> Tag_Code; Slope_Condition = Restore(Tag_Code, DataBase); cin>> Motor_Revolution; while (!(Is_Suitable(Motor_Revolution, Slope_Condition))) { if (Slope_Condition > 0) ++Motor_Revolution; else --Motor_Revolution; cin>> Tag_Code; Slope_Condition = Restore(Tag_Code, DataBase); } } Fig. 2 . Pseudocode of the algorithm for controlling train electric motors based on s lope of the route. In the second algorithm of this system , the train is controll ed in a way that in right turns or left turns of the path, rotation speed of the right wheels or left wheels can be reduced de pen ding on the c onditions . Figure 3 show s the pseudocode of this alg orithm. void Bend_Resolver() { cin>> Tag_Code; Bend_Condition = Restore(Tag_Code, DataBase); cin>> Right_Wheel_Revolution >> Left_Wheel_Revolution; while (!( (Is_Suitable(Right_Wheel_Revolution, Bend_Condition)) && (Is_Suitable(Left_Wheel_Revolution, Bend_Condition)))) { if (Bend_Condition > 0) --Right_Wheel_Revolution; // Turn to Right else --Left_Wheel_Revolution; // Turn to Left cin>> Tag_Code; Bend_Condition = Restore(Tag_Code, DataBase); } } Fig. 3. Pseudoco de of the algo rithm for controlling rotation speed of the right and le ft wheels o f the train based on the turns in the path. In th e thir d alg orithm of the system , the tr ain will slow down its speed and stop when reaching the station , or confronting obstacles such as another train or a hum an o n the rails. Like previously defined algorithm s, this algorithm also starts with reading the tag code. T he pseudocode o f this algorithm is sh own in Fig ure 4. void Stop_Train() { cin>> Tag_Code; Stop_Condition = Restore(Tag_Code, DataBase); cin>> Train_Speed; while (!(Is_Suitable(Train_Speed, Stop_Condition))) { --Train_Speed; cin>> Tag_Code; Stop_Condition = Restore(Tag_Code, DataBase); } } Fig. 4. P seudo code of th e algorithm for slowing do wn the train speed an d stopping it b ased on observed conditi ons. Formulas for determining the suitabilit y of train speed, rotation al speed o f the right wheel or the left wheel, and the rotation al speed of the electric motor on the slope that are used in the Is_Suit able() procedu re are based on the train weight, distance to the barrier or st ation , rout e slope , and the route curve as well as the power of the motor and its current rotation al speed [ 30 , 31 ]. Calculation of these formulas needs technical know ledge in the field of mechanics which is out of scope of th is pa per w ith an I T view to the pr oblem. It should be mentione d that the distance to the hotspots or obstacles can be calculated from the intensity of the received radio signals [ 32 ]. Also, the detection of the rotational speed of the electric motor and th e weigh t o f the train requires appropria te sens ors. III. E XPER I MENT A ND RESULTS To evaluate the effectivenes s of a model, specific test scenari os are neede d, an d di fferent mo dels re quire different methods [33-43]. To test the effectiv eness of the designed model, th e program w as c oded in Code Vision at the mechatroni cs lab o f Ray an Shid Nama Eng. Co. ( RSN) and was loaded onto the Atm ega16 microcontr oller. Then, the microcont roller w as installed on the inte rface ci rcuit boa rd w ith command relays. The interfacin g circuit w as placed on a small model train with tw o electric motors (one o n each side o f the train), and the wiring was d one in such a way that the r elay s could comm and electric motor s. T hen the train w as placed on a laboratory railway track, which was somewhat similar to the actual metro rails, and moved on. Figure 5 shows the small model train on its railw ay trac k in the st ation. Fig. 5 . The mo del train in the s tation In first experim ent, the implemented system based o n the proposed method was ac tivat ed on the m odel train. 60 trips were carri ed out on replica rails, 16 o f wh ich had an acci dent- prone situat ion (human obstacle, other trains, or sharp turn), which resulted in a total of 58 safe trips and only 2 incidents . The same experimen t was retested while the implemented system was deactivate d. Again , out of 60 tri ps, 16 of which had a dangerous situati on. T he outcome included 46 safe trips and 14 inci dents. However, it shoul d be menti oned that in an actual situation, due to the presence of a train driver, the probability of a disaster will be relatively less in both cases. It is b ecause the human agent's alertness in the control of the train has a very impactfu l effect on its safety a nd preventin g inci dents. IV. C ONCLU SION With the e xperiments cond ucted i n the imple mented model, we can say that the efficie ncy o f the proposed system in this article was relati vely e ffective to the reduction of disasters. However, for the definitive conclusion, this system should be installed on a pilot basis on urban su bways and further investigated. The strengths of this s ystem ar e the simplicit y, affordability and availability of needed hard ware and software to launc h it. However, the implementatio n of this system needs installing o f r equired eq uipment at the m etro stati ons and tracks, which takes ti me and is fairly expensive. The s ystem proposed in this paper can be developed to b e used for safety of transportation in urban streets, road transportation, carr ying mater ials and workers i n mines, transporting of m aterials, products and equip ment in agricultural fields, as well as the sa fety o f the tra nsportation in inter-city trains. R EFERENCES [1] P. Fraga-Lamas, T. M . Fernández-Caramés, L. Castedo, “ Towards the Internet of smart trains: A review on industrial IoT-connected railways ” , Sensors, vol . 17, no. 6, pp. 145 7, Jun. 2017. [2] Jain P.C., Vijay gopalan K.P., “ RFID and Wireless Sensor Networks ” , Procee dings of ASCNT , CDAC, Noida, I ndia, pp. 1 - 11 , 2010. [3] Ab oelela, E.; Edberg,W .; Papakonstantinou, C.; Vokkarane, V. Wireless Sensor Network Based Model for Secure Railway Operations. In Procee dings of t he 2 5th IEEE International Conference on Performance, Computing, and Communications Conference, Phoenix, AZ, US A, 1 0 – 12 April 2006. [4] Wang, D.; Yiqing, N. Wirele ss Sensor Networks for Ea rthquake Early Warning Systems of Railway Lines. In Procee dings of the 1st International Workshop on High-Spee d and I ntercity Railways, Shenzhen/Hong K ong, China, 19 – 22 July 2011; pp. 417 – 426. [5] Daliri, Z.S.; Shamshirband, S.; Besheli, M. Ra ilway security th rough the use of wireless sensor networks based on fuzzy logic. I nt. J. Phy s. Sci. 2011, 6, 448 – 458. [6] Farshid Sahba et al., "Wireless Sensors and RFID in Garden Automation", Inter national Journal of Computer and Electron ics Research, vol. 3, no. 4, Augus t 2014. [7] Farshid Sahba, "Museum automation with RFI D", Proceedings of the 2014 Worl d Automation Cong ress (WA C), pp. 19-22, Aug 2014. [8] Farshid Sahba, Z ahra Nourani, "Smar t tractors in pi stachio or chards equipped with RFID", presented at the 2016 Worl d Automation Congress, 2016. [9] "Rail accident fatalities in the EU", Eurostat Statistics Explained, http://ec.europa .eu/eurostat/st atistics-explained/ [10] 1 . L. Bolotnyy, S. Krize , and G. Robins. The practicality of multi -tag rfid systems. I n Proc. International Workshop on RFID Technology - Concepts, Applications, Challe nges ( IW RT 2007 ), Madeira, Portugal, June 2007. [11] 2. L. Bolotnyy and G. Robins. The case for multi -tag rfid systems. I n International Conference on Wire less Algorithms, Sy stems a nd Applications (W ASA ), Chicago, August 20 07. [12] 3. L. Bolotnyy a nd G. Robins. Physically unclonable function -based security and privacy in rfid systems. In Proc. IEEE International Conference on Perv asive C omputing and Comm unications (PerCom 2007), New York, March 20 07. [13] 4 . Marketsandmar kets.com. Smart Railways Market by Solution (Passenger Information, Freight Information, Rail Communicatio n, Advanced Security Monitoring, Rai l Analytics), Component, Se rvice (Professional, Managed), and Region — Global Forecast t o 2 021; Technical Repor t; Marketsandm arkets: Pune, India, Nov ember 2016. [14] 5 . I nternational Transport For um (2011). Available online: http://www .itf-oecd.org/sites/def ault/files/docs/ 1 1outlook.pdf (accessed on 1 April 2017). [15] 6 . Ai, B.; Guan, K .; Rupp, M.; Kurner, T .; Cheng, X.; Yin, X.-F.; Wang, Q.; Ma, G.-Y.; Li, Y.; Xiong, L.; et al. Future railway services- oriented mobil e communica tions netw ork. IEEE C ommun. Mag. 2015, 53, 78 – 85. [16] 7 . Hofe stadt, H. GS M-R: Global Sy stem for Mobile radio communications for Railways. In Proceedings of th e Internatio nal Conference on Electric Railway s i n a United Europe, Amsterdam, The Netherlands, 2 7 – 30 March 1995; pp. 111 – 115. [17] 8 . HORI ZON 2020 Work Programme 2016 – 2017 11. Smart, Gree n and Integr ated Transport, EC Decision C(2016)4614, July 20 16. Available online: https://ec.europa .eu/research/par ticipants/data/re f/h2020/w p/ 2016_2017/main /h2020-wp1617-tran sport_en.pdf (accessed on 1 April 2017). [18] 9 . Rodríguez-Piñeiro, J.; Fraga-Lamas, P.; García-Nay a, J.A.; C astedo, L. Long term evolution security analysis for railway communications. In Procee dings of the I EEE Congreso de Inge niería en Electro-Electrónica, Comunicaciones y Computación (ARANDUCON 2012), Asunción, Paraguay, 28 – 30 Nov ember 2012. [19] 10 . Liu, L.; Tao, C.; Chen, H.-J.; Zhou, T.; Sun, R.-C.; Qiu, J.-H. Survey of wireless channe l measurement and characterization for hi gh-speed railway sce narios. J. Commu n. 2014, 35, 115 – 127. [20] 11 . Zh ang, Y.; He, Z .; Z hang, W.; Xiao, L .; Zhou, S. M easureme nt based delay and doppler charac terizations for high-speed railway hilly [21] Lehner, A.; Rico García , C.; Strang, T. On the performance of TETRA DMO short data se rvice in r ailw ay V ANETs. Wirel. Pers. C ommun. 2013, 69, 1647 – 16 69. [22] A. Sah ba, J. Prevost “Hypercube Based Clusters in Cloud Computing” presented at 11th I nternatio nal Symposium on Intell igent Automation and Control, W orld A utomation Congress 2016, P uerto Rico, J uly 2016. [23] A. Sahba, R. Sahba, and W.-M. L in, "Improving IPC in Simultaneo us Multi-Threading (SMT ) Processors by Capping IQ Utilization According to Dispatched Memory Instructions," p resented at the 2014 World A utomation Congre ss, Waikoloa Vill age, HI , 2014. [24] P. Shahmaleki and M. Mahzoon, ”Designing a hi erarchi cal fuzzy controlle r f or ba cking- up a four wheel aut onomous robot,” 2008 American Contro l Confere nce, Seattle, W A, 2008, pp. 48 93 -4897. [25] P. Shahmaleki, M. Mahzoon, a nd V . Shahmale ki, ”Desig ning Fuz zy Controlle r and Real T ime Expe rimental Studies on a N onholono mic Robot”. IFA C Proceedings Vol umes, 42(15) , pp.312 -319, 2009. [26] Dabbaghjamanesh, M., A. Moeini, M. Ashkaboosi, P. Khazaei, and K. Mirzapalangi. "High performance control of grid connected cascaded H - Bridge active rectifier based on type II-fuzzy logic controller with low frequency modulation technique." International Journal of Electrical and Computer Enginee ring 6, no. 2 ( 2016): 484. [27] Dabbaghjamanesh, M orteza, Shahab Mehraeen, Abdollah Kavousifar d, and Mosayeb Afshari Igder. "Effec tive scheduling operation of coordinated and uncoordinate d wind -hydro and pumped-storage in generation units with mod ified JAYA algorithm." In Industry Applications So ciety A nnual Meeting, 20 17 IEEE, pp. 1-8. I EEE, 2017. [28] Erol, B. A., Vaishnav, S., Labrado, J. D., Benavidez, P., & Jamshidi, M. (2016, July). C loud-based C ontrol and vSL AM through coo perative Mapping and Localization. In World A utomation Congress (WAC), 2016 (pp. 1-6). I EEE. [29] Labrado, J. D., Erol, B. A., Ortiz, J., Benavidez , P., Jamshidi, M., & Champion, B. (2016, June). Propose d testbed for the modeling and control of a system of au tonomous vehicles. In System of Systems Engineering Confe rence (So SE), 2016 11th (p p. 1-6). IEEE. [30] Van Den Abeele, D.; Berbineau, M.; W ahl, M. Procede d e Transfert d e Donnees D’alerte En tre un Veh icule Ferr oviaire en Panne et un Centre de Controle, Dispositif Associe. International Patents WO201 0125321 A1, 4 Novembe r 2010. [31] Lehner, A.; Rico García, C.; Strang, T. On the performance of TETRA DMO short data se rvice in r ailway VANETs. Wirel. Pers. Commun. 2013, 69, 1647 – 16 69. [32] Van Den Abeele, D.; Berbineau, M.; W ahl, M. Procede d e Transfert de Donnees D’alerte En tre un Veh icule Ferr oviaire en Panne et un Centre de Controle, Dispositif Associe. International Patents WO201 0125321 A1, 4 Novembe r 2010. [33] P. Shahmaleki, M. M ahzoon, A. Kazemi, a nd M. Basiri, ”Visionbased hierarchical fuzzy controller and real time results for a wheele d autonomous ro bot.” Motion Co ntrol. InTech, 201 0. [34] P. Shahmaleki, M . Mahzoon and B. Ranjbar, ”Real t i me experime ntal study of truck backer u pper problem with fuzzy c ontroller,” 2008 Worl d Automation Co ngress, Haw aii, HI, 2008, pp. 1- 7. [35] Erol B.A., Majumdar A ., Lwowski J., Benavidez P., Rad P., Jamsh idi M. (2018) I mproved Dee p Neural Netw ork Object T racking System for Applications in Home Robotics. In: Pedrycz W., Chen SM. (eds) Computational Intellige nce for Pattern Recognitio n. Studies in Computational I ntellige nce, vol 777. Spri nger, Cham. [36] A. Sahba, Y. Zhang, M. Hays and W.-M. Lin, "A Real-Time Per-Threa d IQ -Ca pping Te chnique for Simultaneo us MultiThre ading (SMT) Processo rs", In the Proce edings of the 11th Inter national C onfere nce on Information T echnology New Generation (l TNG 2014), April 2014. [37] M. Bag heri, M. Madani, R. Sah ba, and A . Sahba, "Real time object detection using a novel adaptive color thresholding method", International ACM workshop on Ubiquitous meta user interface s (Ubi - MUI'11), Scotts dale, AZ , November 2011. [38] Dabbaghjamanesh, Morteza, Shahab M ehraeen, Abdollah Kavousi Fard, and Farzad Ferdowsi. "A New Efficient Stochasti c Energy M anagement Technique for I nterconnected AC Mi crogrids." arXiv pre print arXiv:1803.03 320 (2018). [39] Ashkaboosi, Mary am, Seyed Mehdi Nourani, Peyman Khazaei, M orteza Dabbaghjamanes h, and Amirhoss ein M oeini. "An opt imization technique based on p rofit of in vestme nt and mark et clearing in wind power systems." American Journal of Electrical and Electronic Engineering 4, no. 3 (2016): 85-91. [40] H. Bouzary , F. F rank Ch en, "Serv ice opt imal selection and composition in cloud manufacturing: a comprehe nsive survey," The International Journal of A dvanced Manufact uring T echnology , 2018. [41] H. Davarikia, F. Znidi, M. R. Aghamohamma di, K. I qbal. Identification of coherent groups of generator s based on synchronization c oefficien t. 2016 I EEE Power a nd Energ y S ociety General Meeting (PESG M). 2016:1- 5. [42] Jahangiri, Vahid, Hadi Mira b, Reza Fathi, and Mir Mohammad Ettefag h. "TLP Structural Heal th Monitoring Based on Vibratio n Signal of Energy Harvesting System." Latin American Journal of Solids a nd Structures 13, no. 5 (2016): 897-915. [43] Mirab, Hadi, Reza F athi, Vahid Jahangiri, Mir Mohammad Ettef agh, and Reza Hassannejad. "E nergy harvesting f rom sea wave s w ith consideration of airy and JONSWAP theory and optimization of energy harvester para meters." Journal of Marine Science and Application 14, no. 4 (2015): 440-449.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment