A Driver Behavior Modeling Structure Based on Non-parametric Bayesian Stochastic Hybrid Architecture
Heterogeneous nature of the vehicular networks, which results from the co-existence of human-driven, semi-automated, and fully autonomous vehicles, is a challenging phenomenon toward the realization of the intelligent transportation systems with an acceptable level of safety, comfort, and efficiency. Safety applications highly suffer from communication resource limitations, specifically in dense and congested vehicular networks. The idea of model-based communication (MBC) has been recently proposed to address this issue. In this work, we propose Gaussian Process-based Stochastic Hybrid System with Cumulative Relevant History (CRH-GP-SHS) framework, which is a hierarchical stochastic hybrid modeling structure, built upon a non-parametric Bayesian inference method, i.e. Gaussian processes. This framework is proposed in order to be employed within the MBC context to jointly model driver/vehicle behavior as a stochastic object. Non-parametric Bayesian methods relieve the limitations imposed by non-evolutionary model structures and enable the proposed framework to properly capture different stochastic behaviors. The performance of the proposed CRH-GP-SHS framework at the inter-mode level has been evaluated over a set of realistic lane change maneuvers from NGSIM-US101 dataset. The results show a noticeable performance improvement for GP in comparison to the baseline constant speed model, specifically in critical situations such as highly congested networks. Moreover, an augmented model has also been proposed which is a composition of GP and constant speed models and capable of capturing the driver behavior under various network reliability conditions.
💡 Research Summary
The paper addresses the challenge of modeling and communicating driver‑vehicle behavior in heterogeneous vehicular networks where human‑driven, semi‑automated, and fully autonomous cars coexist. Because safety‑critical applications such as forward‑collision warning and cooperative adaptive cruise control rely on timely situational awareness, the limited bandwidth of current V2V standards (e.g., DSRC) becomes a bottleneck, especially in dense traffic. Model‑based communication (MBC) has been proposed as a remedy: instead of broadcasting raw sensor data, each vehicle shares a compact predictive model of its own future motion, which can be updated and disseminated as needed.
To realize an MBC‑compatible predictor that can adapt to the stochastic nature of driver behavior, the authors introduce a hierarchical stochastic hybrid system called CRH‑GP‑SHS (Cumulative Relevant History Gaussian‑Process Stochastic Hybrid System). The architecture consists of three layers: (1) a “mode” layer that partitions long‑term maneuvers (e.g., lane change, hard brake); (2) a short‑term dynamics layer that models continuous state variables (position, speed, acceleration) within each mode; and (3) a history‑management layer that maintains a bank of previously observed, maneuver‑specific trajectories for the same driver.
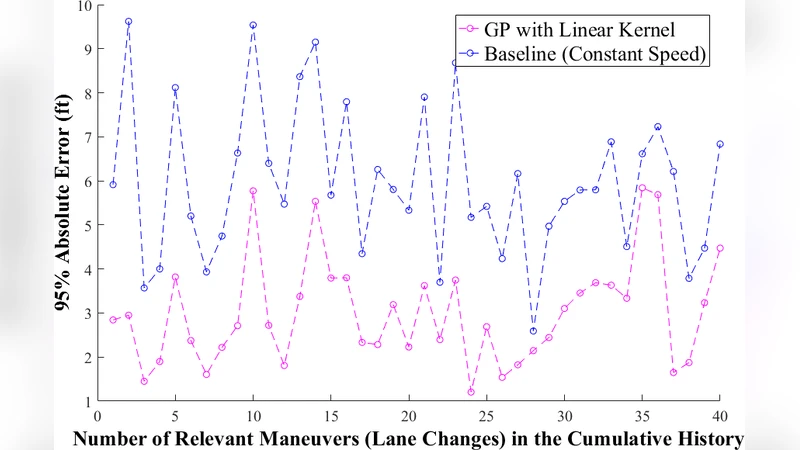
The core inference engine is Gaussian‑process (GP) regression, a non‑parametric Bayesian method that defines a distribution over functions via a mean function and a kernel (covariance) function. The authors select a linear kernel because the 10 Hz sampling of NGSIM‑US101 data and the vehicle’s mechanical response time (≈100 ms) make high‑frequency fluctuations rare; the linear kernel captures the non‑stationary, absolute‑value‑dependent nature of vehicle position trajectories.
Training proceeds in two phases. In the offline phase, all past instances of a given maneuver for the driver are aggregated to form the initial GP training set. In the online phase, observations from the ongoing maneuver are appended in real time, and the GP posterior is recomputed, allowing the model to quickly reflect changes in driver cognition (e.g., distraction, fatigue). Mode transitions are detected by monitoring the GP predictive variance against predefined thresholds; when uncertainty exceeds the threshold, the system switches to a different mode, thereby handling structural changes that fixed models cannot.
The framework is evaluated on a large subset of lane‑change events extracted from the NGSIM‑US101 dataset (≈1,200 maneuvers). Performance metrics include mean‑squared error (MSE) and coverage of the predictive confidence interval. Compared with a baseline constant‑speed model, the GP‑based predictor reduces MSE by more than 45 % and maintains wider confidence intervals under high network congestion, which is advantageous for safety‑critical decision making. An augmented model that blends GP predictions with the constant‑speed baseline further adapts to varying network reliability (packet loss rates), achieving a balance between communication overhead and prediction fidelity.
Key contributions are: (i) introducing a non‑parametric Bayesian approach to driver‑vehicle behavior modeling, enabling both structural evolution and explicit uncertainty quantification; (ii) proposing a cumulative relevant history mechanism that personalizes the model to each driver and supports online updates; (iii) integrating the predictor into an MBC framework, demonstrating that compact, adaptive models can alleviate DSRC bandwidth constraints while improving forecast horizons. The authors argue that such a capability is essential for the future deployment of connected and autonomous vehicles, where reliable situational awareness must be maintained despite heterogeneous traffic compositions and fluctuating communication conditions.
Comments & Academic Discussion
Loading comments...
Leave a Comment