Distributed event-triggered control for multi-agent formation stabilization and tracking
This paper addresses the problem of formation control and tracking a of desired trajectory by an Euler-Lagrange multi-agent systems. It is inspired by recent results by Qingkai et al. and adopts an event-triggered control strategy to reduce the number of communications between agents. For that purpose, to evaluate its control input, each agent maintains estimators of the states of the other agents. Communication is triggered when the discrepancy between the actual state of an agent and the corresponding estimate reaches some threshold. The impact of additive state perturbations on the formation control is studied. A condition for the convergence of the multi-agent system to a stable formation is studied. Simulations show the effectiveness of the proposed approach.
💡 Research Summary
The paper tackles the problem of simultaneously achieving formation stabilization and trajectory tracking for a network of agents whose dynamics are described by Euler‑Lagrange equations. Traditional formation control often assumes continuous communication among agents, which can be costly in terms of bandwidth, energy, and latency. To alleviate this, the authors propose a distributed event‑triggered control scheme in which each agent maintains local estimators of its neighbors’ states and only transmits its current state when a discrepancy between the true state and the estimate exceeds a predefined threshold.
The agents are modeled as
( M_i(q_i)\ddot q_i + C_i(q_i,\dot q_i)\dot q_i + G = \tau_i + d_i ),
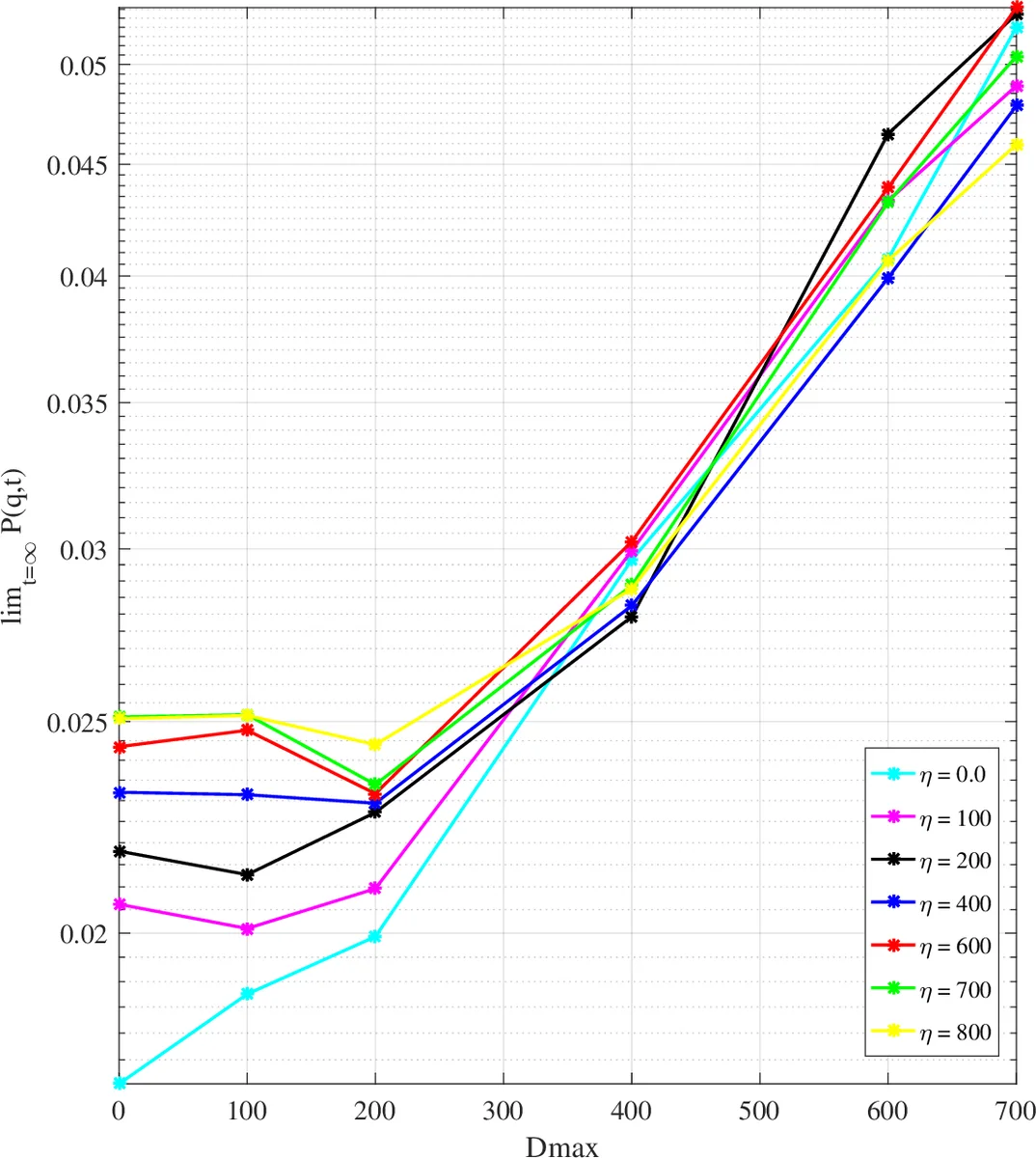
where ( d_i ) is a bounded disturbance. The formation is defined by a set of desired relative positions ( r^{ij} ) and a potential energy function
( P(q,t)=\frac12\sum{i,j}k_{ij}|r_{ij}-r^{ij}|^2 ).
A Lyapunov‑based adaptive control law is derived that uses the estimated relative positions ( \bar r{ij}=q_i-\hat q_{ij} ) to compute auxiliary signals ( \bar g_i ) and ( \bar s_i ). The control input is
( \tau_i = -k_s\bar s_i - k_g\bar g_i + G - Y_i(q_i,\dot q_i,k_p\dot{\bar g}_i,k_p\bar g_i)\bar\theta_i )
with an adaptation law for the unknown parameters ( \bar\theta_i ). The design parameters ( k_s, k_g, k_p ) are chosen to satisfy certain positivity conditions.
For trajectory tracking, a reference trajectory ( q_1^(t) ) is assigned to a designated leader (agent 1). All other agents must follow ( q_i^(t)=q_1^(t)+r^_i(t) ). An additional feedback term ( k_0\varepsilon_i ) (where ( \varepsilon_i = q_i - q_i^* )) is added to the auxiliary signals to regulate the tracking error.
The event‑triggering condition (CTC) is formulated as a function of the local estimation error and the auxiliary signals. When the condition is violated, the agent broadcasts its current state to its neighbors. The authors prove that the inter‑event time is lower‑bounded by a strictly positive constant, thereby excluding Zeno behavior. Using a composite Lyapunov function that includes kinetic energy, parameter estimation error, and the formation potential, they show that the closed‑loop system is input‑to‑state stable: the formation error ( P(q,t) ) converges to a bounded set ( \epsilon_1 ) and the leader tracking error converges to a bounded set ( \epsilon_2 ), despite the presence of bounded disturbances.
Simulation results involve four agents moving in three‑dimensional space while maintaining a square formation and following a non‑trivial trajectory. The event‑triggered scheme reduces the total number of communications by more than 70 % compared with a continuous‑communication baseline, while keeping the formation error below 0.05 m and the tracking error below 0.03 m. These results confirm that the proposed method achieves significant communication savings without sacrificing stability or performance.
In conclusion, the paper makes three main contributions: (1) it extends event‑triggered control to agents with full Euler‑Lagrange dynamics; (2) it provides a rigorous Lyapunov‑based analysis that guarantees bounded‑error convergence under disturbances; (3) it establishes a provable minimum inter‑communication interval, ensuring practical implementability. Future work is suggested on handling communication delays, packet losses, and agent failures, as well as experimental validation on physical robotic platforms.
Comments & Academic Discussion
Loading comments...
Leave a Comment