Temporal and Spatial Characteristics of mmWave Propagation Channels for UAVs
Unmanned aerial vehicles~(UAVs) are envisioned to be an integral part of future 5G communication systems. The agile nature of UAVs for serving users at different locations can help to dynamically optimize coverage and quality-of-service (QoS) in future networks. %However, there is very limited literature available for mmWave communications using UAVs. In this work, we explore the small scale temporal and spatial characteristics of mmWave air-to-ground~(AG) line-of-sight~(LOS) propagation channels at $28$GHz in different environmental scenarios: dense-urban, suburban, rural, and over sea using omni-directional antennas employing Wireless InSite ray tracing software. We classify the received multipath components(MPCs) into persistent and non-persistent components. The small scale temporal and spatial characteristics of the AG propagation channel are found to be dependent on the scatterer properties: number, distribution, and geometry. Additionally, clustering of MPCs in the time and spatial domain for different environments is found to be dependent on the scatterer properties and receiver sensitivity. When the height of the UAV is comparable to the height of the scatterers, we observe large temporal and angular spreads.
💡 Research Summary
This paper investigates the small‑scale temporal and spatial characteristics of millimeter‑wave (mmWave) air‑to‑ground (AG) propagation channels for unmanned aerial vehicles (UAVs) operating at 28 GHz. While UAVs are expected to become integral components of future 5G and beyond networks, the literature on mmWave UAV communications remains scarce, especially for short‑range links where ground scatterers have a pronounced impact. To fill this gap, the authors employ the Remcom Wireless InSite ray‑tracing tool to simulate four representative environments: dense‑urban, suburban, rural, and over‑sea. Each scenario is defined by specific building heights, numbers, and layouts (e.g., dense‑urban: 70–180 m tall, 100 buildings; suburban: 4–30 m, 20 buildings; rural: 4–8 m, 10 buildings; sea: no buildings). All structures are modeled with frequency‑sensitive concrete at 28 GHz, and the ground is wet earth; the sea surface is a calm 10‑m‑deep water layer that introduces only additional attenuation through refraction.
The simulation setup uses omnidirectional half‑wave dipole antennas (vertical polarization) at both transmitter and receiver. The ground transmitter is placed 2 m above the surface, while the UAV receiver follows a straight‑line trajectory at four discrete altitudes: 2 m, 50 m, 100 m, and 150 m. The UAV flies at a constant speed of 15 m/s, starting 40 m horizontally from the transmitter, and the total link length is limited to 1.2 km to keep path loss manageable. Transmit power is 30 dBm, and the receiver sensitivity is set to –110 dBm, a critical parameter for mmWave systems because it determines how many multipath components (MPCs) can be captured.
The channel impulse response (CIR) is expressed as a sum of L(t) MPCs, each characterized by amplitude αₗ(t), time‑of‑arrival τₗ(t), phase ψₗ(t), departure angles θₗ(t) (elevation and azimuth), and arrival angles φₗ(t). The authors classify MPCs into two groups: (i) persistent components, consisting of the direct line‑of‑sight (LOS) path and the ground‑reflected component (GRC); and (ii) non‑persistent components, encompassing all other non‑LOS (NLOS) paths that appear and disappear as the UAV moves. Persistent components are deterministic, governed by geometry, free‑space loss, and antenna misalignment captured by a monotonic function g(φₑ). The GRC further includes the ground reflection coefficient, which depends on the grazing angle. Non‑persistent components are modeled as a birth‑death stochastic process whose statistics depend on the number, distribution, height, and material of scatterers.
Power analysis reveals distinct behaviors depending on UAV altitude. When the UAV and transmitter share the same height (e.g., 2 m), antenna alignment loss is negligible (g(φₑ)≈1) and all MPC powers decay monotonically with distance, following the free‑space path‑loss law. At higher UAV altitudes (e.g., 150 m), the initial segment of the trajectory suffers from significant elevation‑plane misalignment, causing a temporary increase in received power as the UAV moves away and the alignment improves, after which free‑space loss dominates and power declines. The GRC experiences larger fluctuations because the ground‑reflection coefficient amplifies misalignment effects.
Temporal characteristics are examined through the distribution of TOAs. Cumulative distribution functions (CDFs) show that persistent components produce an almost linear CDF, reflecting their predictable, distance‑dependent delay. In contrast, non‑persistent components generate spread and irregularities that are highly environment‑dependent. Over‑sea links, lacking scatterers, exhibit near‑linear CDFs across all UAV heights. Rural and suburban scenarios display minor deviations only when the UAV flies at low altitudes (2 m or 50 m), where a few small buildings can generate NLOS paths. Dense‑urban environments produce the widest TOA variance at all heights because many buildings are comparable to or taller than the UAV, creating numerous NLOS reflections and diffractions.
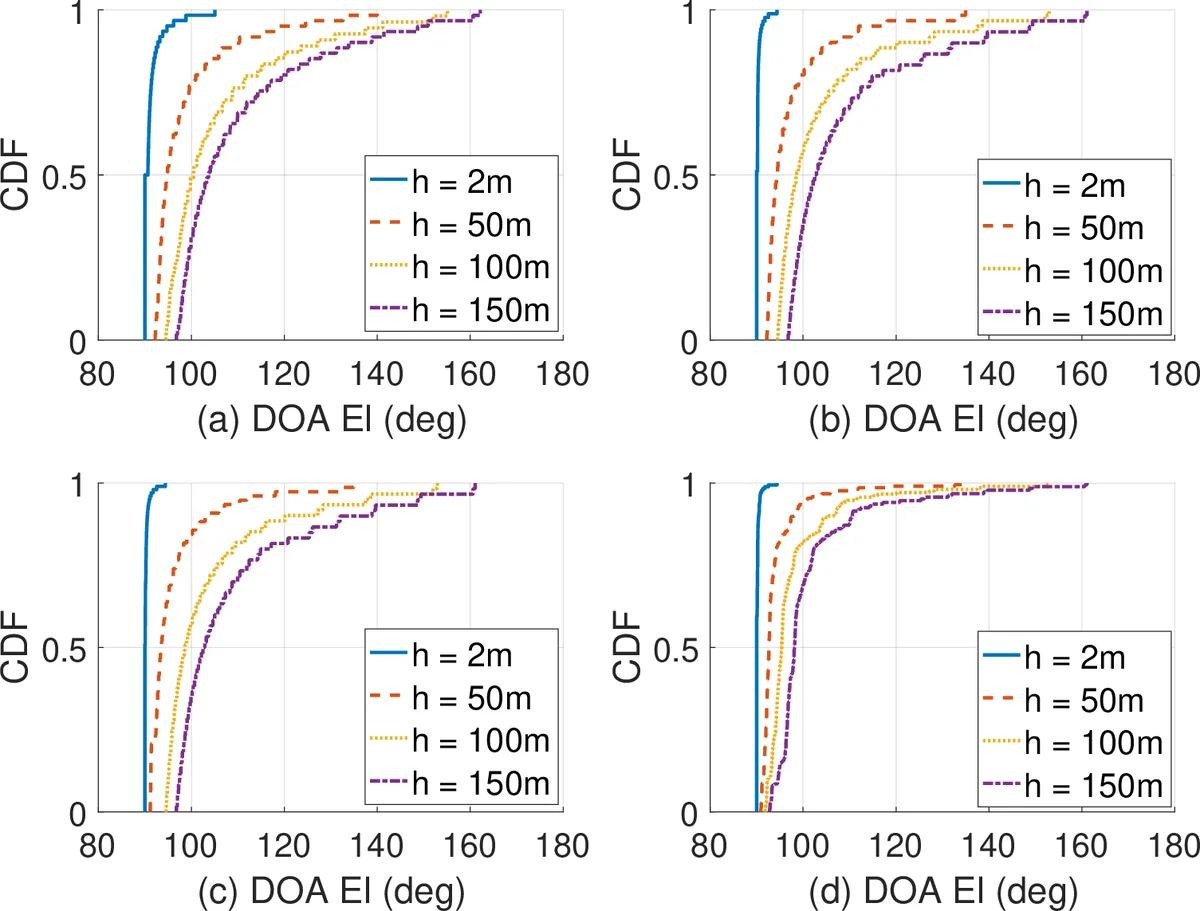
Spatial characteristics focus on direction‑of‑arrival (DoA) and direction‑of‑departure (DoD) in both azimuth and elevation. In sparse environments (sea, rural), DoA clusters tightly around the LOS and GRC angles, especially at higher UAV altitudes where NLOS paths are unlikely to reach the UAV. In suburban areas, low‑altitude UAV flights encounter occasional NLOS reflections from modest buildings, widening the azimuth spread modestly. Dense‑urban scenarios, however, generate a rich angular spectrum: at any altitude, the DoA azimuth distribution spans a broad range, and elevation spreads become large when UAV height approaches building heights. This indicates that UAVs operating in cityscapes must account for significant angular dispersion, which impacts beamforming, tracking, and interference management.
Overall, the study demonstrates that mmWave UAV‑AG channels are far more sensitive to UAV altitude and surrounding geometry than conventional terrestrial channels. Persistent components are predictable and can be modeled analytically, but the non‑persistent component statistics require environment‑specific stochastic models that capture building density, height distribution, and material properties. The findings suggest that future 5G/6G standards and system designs for UAV communications should incorporate altitude‑aware channel models, adaptive beamforming that can handle large angular spreads, and receiver sensitivity specifications that balance hardware complexity with the need to capture sufficient multipath for reliable link performance.
Comments & Academic Discussion
Loading comments...
Leave a Comment