Graph-Based Resource Allocation with Conflict Avoidance for V2V Broadcast Communications
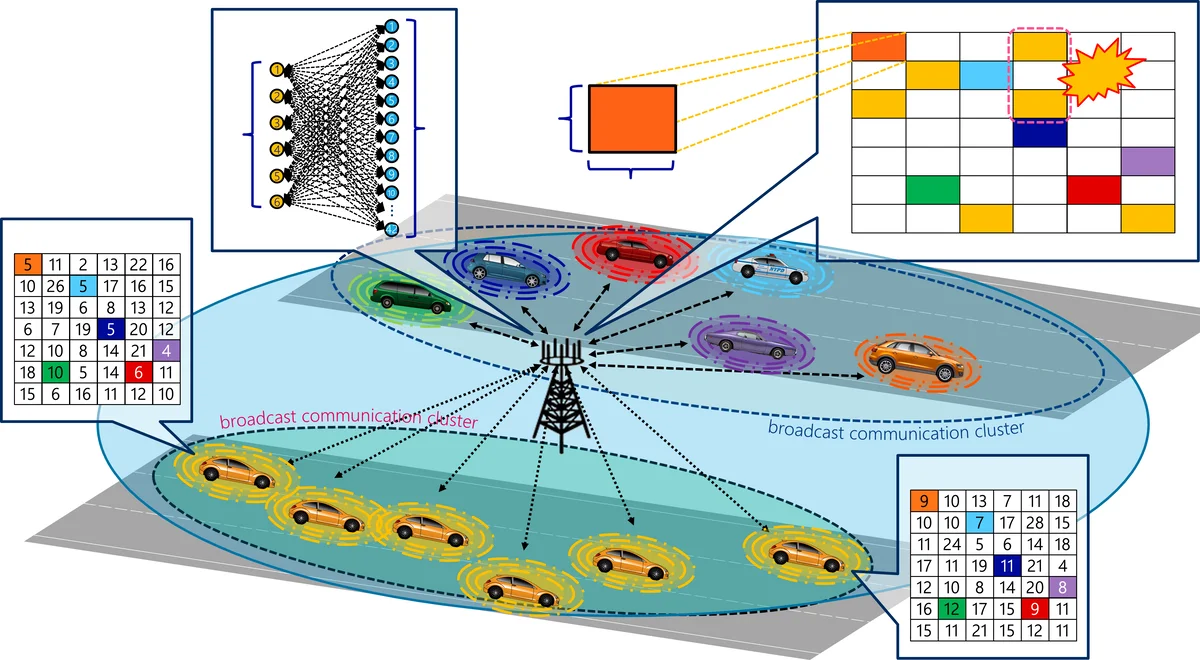
In this paper we present a graph-based resource allocation scheme for sidelink broadcast vehicle-to-vehicle (V2V) communications. Harnessing available information on the geographical position of vehicles and spectrum resources utilization, eNodeBs are capable of allotting the same set of sidelink resources to several different vehicles in order for them to broadcast their signals. Hence, vehicles sharing the same resources would ideally be in different communications clusters for the interference level-generated due to resource repurposing-to be maintained under control. Within a communications cluster, it is crucial that vehicles transmit in orthogonal time resources to prevent conflicts as vehicles-with half-duplex radio interfaces–cannot transmit and receive simultaneously. In this research, we have envisaged a solution based on a bipartite graph, where vehicles and spectrum resources are represented by vertices whereas the edges represent the achievable rate in each resource based on the signal-to-interference-plus-noise ratio (SINR) that vehicles perceive. The aforementioned constraint on time orthogonality of allocated resources can be approached by aggregating conflicting vertices into macro-vertices which, in addition, narrows the search space yielding a solution with computational complexity equivalent to the conventional graph matching problem. We show mathematically and through simulations that the proposed approach yields an optimal solution. In addition, we provide simulations showing that the proposed method outperforms other competing approaches, specially in scenarios with high vehicular density.
💡 Research Summary
The paper addresses the problem of allocating sidelink radio resources for vehicle‑to‑vehicle (V2V) broadcast communications in 5G Mode 3, where an eNodeB centrally schedules resources that vehicles use to transmit cooperative awareness messages (CAMs). A key requirement is that vehicles belonging to the same communication cluster must transmit in orthogonal time slots because their half‑duplex radios cannot transmit and receive simultaneously. Consequently, the resource allocation problem must enforce a “time‑orthogonality” constraint in addition to maximizing the overall system throughput.
To model the problem, the authors construct a complete bipartite graph G = (V,R,E). The left‑hand vertex set V represents the vehicles in a cluster, the right‑hand set R represents the available sidelink resources (each resource corresponds to a specific sub‑band in a given subframe), and each edge (i,j) carries a weight c₍ᵢⱼ₎ = B·log₂(1 + SINRᵢⱼ), i.e., the achievable data rate for vehicle i on resource j. In the classic unconstrained weighted bipartite matching formulation, the objective is to select a set of edges forming a perfect matching that maximizes the sum of the selected weights. This problem can be solved optimally in O(N³) time by the Kuhn‑Munkres (Hungarian) algorithm, where N = |V| = |R|.
However, the time‑orthogonality requirement introduces an additional constraint: no two vehicles may be assigned resources that belong to the same subframe. The authors capture this by grouping the K resources that share a subframe into a macro‑vertex Rα (α = 1…N). Each macro‑vertex thus contains K individual resources. The new constraint can be expressed as “for each macro‑vertex, at most one of its constituent resources may be matched to any vehicle.” This transforms the original problem into a constrained weighted matching problem that cannot be directly tackled by the Hungarian algorithm.
The core contribution is a mathematical transformation that eliminates the macro‑vertex constraint while preserving optimality. The authors first observe that for any vehicle i, the binary variables xᵢⱼ and xᵢₖ (both incident to i) cannot both be 1 if j and k belong to the same macro‑vertex, i.e., xᵢⱼ·xᵢₖ = 0. Using this property, they rewrite the objective function as a sum of squared terms and add zero‑valued cross‑terms without affecting the optimum. By defining a new binary variable yᵢα = ∑_{j∈Rα} xᵢⱼ (which indicates whether vehicle i uses any resource in subframe α), the problem reduces to:
max ∑_{i,α} dᵢα yᵢα
subject to ∑_α yᵢα = 1 ∀i, ∑_i yᵢα = 1 ∀α, yᵢα ∈ {0,1}
where dᵢα can be shown to equal max_{j∈Rα} cᵢⱼ, i.e., the best achievable rate for vehicle i in subframe α. This formulation is exactly an unconstrained bipartite matching between vehicles and macro‑vertices, which can again be solved optimally by the Hungarian algorithm with the same O(N³) complexity as the original unconstrained problem. The authors provide two parallel derivations—one based on summation notation and another using matrix (tensor) representation—to substantiate the equivalence.
To validate the approach, extensive simulations are performed under realistic V2V channel models, varying vehicle densities, numbers of subframes (N), and resources per subframe (K). The proposed macro‑vertex matching is compared against three baselines: (i) random resource assignment, (ii) conventional weighted matching that ignores time‑orthogonality, and (iii) heuristic conflict‑avoidance schemes. Results show that the proposed method consistently yields higher aggregate throughput (up to 30 % gain), improves the minimum SINR experienced by any vehicle, and achieves a higher Jain’s fairness index, especially in high‑density scenarios (e.g., >200 veh/km²). The simulations also confirm that the algorithm respects the half‑duplex constraint, eliminating any intra‑cluster transmission collisions.
The paper discusses practical considerations: the need for the eNodeB to acquire accurate vehicle positions and channel state information, the handling of overload situations (when the number of vehicles exceeds the number of subframes), and the possibility of inserting dummy vehicles to preserve the |R| = K·|V| relationship. Complexity analysis confirms that the macro‑vertex aggregation reduces the effective search space by a factor of K while keeping the computational load identical to the classic Hungarian algorithm, making the solution suitable for real‑time scheduling in cellular networks.
In summary, the authors present a novel graph‑theoretic framework that transforms the V2V sidelink resource allocation problem with strict time‑orthogonality constraints into a standard maximum‑weight bipartite matching problem. By aggregating resources into macro‑vertices, they preserve optimality, achieve polynomial‑time solvability, and demonstrate superior performance over existing schemes, thereby offering a practical and theoretically sound solution for reliable, low‑latency V2V broadcast communications in dense vehicular environments.
Comments & Academic Discussion
Loading comments...
Leave a Comment