An EEG pre-processing technique for the fast recognition of motor imagery movements
In this paper we propose a new pre-processing technique of Electroencephalography (EEG) signals produced by motor imagery movements. This technique results to an accelerated determination of the imagery movement and the command to carry it out, within the time limits imposed by the requirements of brain-based real-time control of rehabilitation devices, making thus feasible to drive these devices according to patient’s will. Based on event related desynchronization and synchronization (ERD/ERS) of motor imagery, the received patient signal is first subjected to the removal of environmental, system and interference noise which correspond to normal human activities such as eye-blinking and cardiac motion. Next, power and energy features of the processed signal are compared with the same features of classified signals from an available database and the class to which the processed signal belongs, is identified. The database classification is done off-line by using the SVM algorithm.
💡 Research Summary
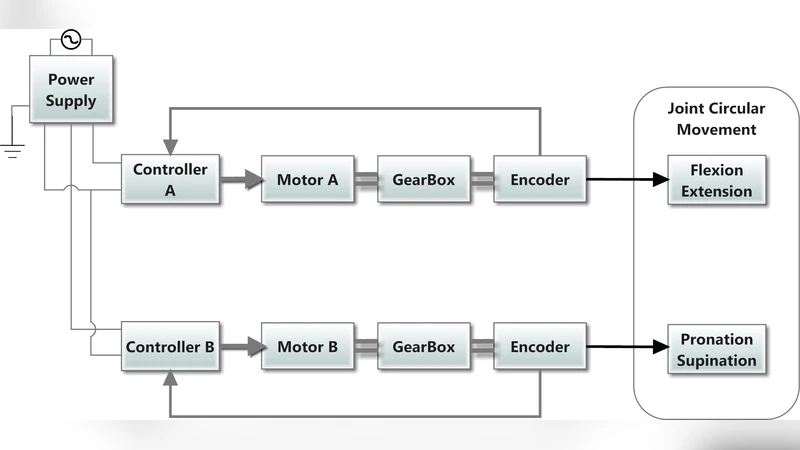
The paper presents a novel EEG pre‑processing pipeline aimed at rapid recognition of motor‑imagery (MI) movements for real‑time control of rehabilitation devices such as continuous passive motion (CPM) machines. The authors argue that allowing patients to drive these devices with their intention can shorten therapy time and improve outcomes, but this requires fast extraction of the event‑related desynchronization/synchronization (ERD/ERS) patterns that characterize MI in the mu (8‑13 Hz) and beta (13‑30 Hz) bands.
The proposed pipeline consists of several stages. First, a high‑pass filter (0.5–90 Hz) removes DC drift, and a 50 Hz notch filter eliminates power‑line interference. Second, blind source separation (BSS) techniques are employed to suppress ocular (EOG) and cardiac (ECG) artifacts. Three BSS algorithms are evaluated: canonical correlation analysis‑based BSS (BSS‑CCA), a fast ICA variant for non‑Gaussian time‑correlated signals (FCOBI), and second‑order BSS (SOBI). Third, only a subset of electrodes over the premotor cortex (FC3, FCz, FC4, C3, C4, etc.) are retained. Within each channel, the ERD and ERS windows are identified, and two simple features are computed for each window: average power (P = \frac{1}{N}\sum x_i^2) and energy (E = \sum x_i^2 \cdot T), where N is the number of samples and T the sampling period.
These power‑energy vectors constitute a low‑dimensional feature set that encodes both the type of movement (left/right hand) and the ERD/ERS state. An offline training phase uses 109 subjects, each providing 64‑channel EEG recordings of several one‑minute baseline runs and multiple two‑minute MI tasks. For every subject, the three BSS methods generate three feature matrices, which are concatenated and fed to a binary Support Vector Machine (SVM). The SVM is trained to discriminate left vs. right hand and ERD vs. ERS simultaneously.
Experimental results demonstrate that the pre‑processing dramatically reduces computational load. With preprocessing, SVM training per electrode averages 0.85 seconds (range 0.8–0.96 s), whereas without preprocessing it takes 3.5–5.2 seconds, a four‑fold speed‑up. Classification accuracy remains essentially unchanged (≈88–94 % correct) regardless of preprocessing, indicating that the essential discriminative information is preserved. In an online test, a randomly selected dataset is processed, its first epoch’s power‑energy features are extracted, and the trained SVM classifies it in about 0.13 seconds with a mis‑classification rate below 12 %.
The authors conclude that their lightweight pre‑processing—comprising basic filtering, BSS‑based artifact removal, and simple power/energy feature extraction—enables fast and reliable MI detection suitable for embedded BCI systems. Future work will explore richer feature sets (e.g., mean power, variance) and real‑time integration with rehabilitation robots to validate closed‑loop control in clinical settings.
Comments & Academic Discussion
Loading comments...
Leave a Comment