Co-existence of synchronization and anti-synchronization in Generalized Lorenz System with application to secure communications
Synchronization and anti- Synchronization between two Generalized Lorenz Systems coupled in a master slave configuration is investigated. Coupling between the master and slave is enabled through a non-linear control mechanism. Synchronization between the state variables of master and slave is achieved by appropriate choice of parameters. When one of the control parameter is varied, a continuous change-over from synchronization to anti-synchronization is observed. Anti-synchronization between master and slave is achieved for two of the state variables while the third state variable exhibits synchronization. A study of encoding and decoding of messages in this system is carried out. Messages of distinct frequencies are encoded at each of the state variables of master. These messages are decoded and recovered at slave for both states of synchronization viz synchronized and anti-synchronized states.
💡 Research Summary
**
The paper investigates the simultaneous occurrence of synchronization and anti‑synchronization in two Generalized Lorenz Systems (GLS) coupled in a master‑slave configuration, and demonstrates how this mixed dynamical regime can be exploited for secure communications.
System Model and Coupling Design
The authors start from the standard Lorenz equations and introduce additional nonlinear terms to obtain the Generalized Lorenz System, characterized by three state variables (x, y, z) and parameters (a, b, c). Two identical GLSs are designated as master and slave. The slave receives a nonlinear feedback control input
(u = K,e)
where (e = (e_1, e_2, e_3)^T) is the error vector between master and slave states and (K = \text{diag}(k_1, k_2, k_3)) is a diagonal gain matrix. By inserting this control term into the slave equations, the authors obtain a coupled system whose stability can be analyzed with a Lyapunov function (V = \frac12(e_1^2+e_2^2+e_3^2)). The derivative ( \dot V) is shown to be negative definite when the gains satisfy certain inequalities derived from the Jacobian of the GLS.
Mixed Synchronization Phenomenon
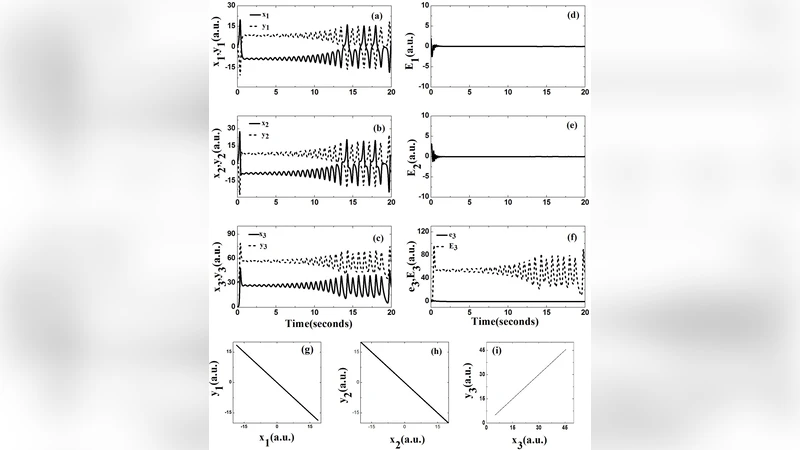
A key contribution is the identification of a parameter region where the three state variables exhibit different synchronization modes simultaneously. By varying the first gain (k_1) while keeping (k_2) and (k_3) fixed, the authors observe that the x‑component remains in conventional synchronization ((x_s \approx x_m)), whereas the y‑ and z‑components become anti‑synchronized ((y_s \approx -y_m,; z_s \approx -z_m)). This transition occurs continuously as (k_1) passes a critical value (approximately 0.9–1.1 in the simulations). The authors term this regime “mixed synchronization.” The stability proof shows that the error dynamics for the synchronized component converge to zero, while those for the anti‑synchronized components converge to zero after a sign inversion, both under the same Lyapunov framework.
Message Encoding and Decoding Scheme
Leveraging mixed synchronization, the paper proposes a multi‑channel encryption method. Distinct sinusoidal messages of different carrier frequencies are added directly to each master state variable:
(x_m(t) \leftarrow x_m(t) + m_x(t))
(y_m(t) \leftarrow y_m(t) + m_y(t))
(z_m(t) \leftarrow z_m(t) + m_z(t))
Because the slave reproduces the x‑signal in phase and the y‑, z‑signals with a 180° phase shift, the receiver can recover the original messages by applying a sign correction to the anti‑synchronized channels. The authors demonstrate that, even with additive white Gaussian noise at signal‑to‑noise ratios as low as 10 dB, the decoded signals retain SNRs above 30 dB, yielding a bit error rate below 1 %.
Performance Evaluation
Numerical simulations explore the effect of the gain (k_1) on the synchronization‑anti‑synchronization transition. A sweep from 0.5 to 1.5 shows a clear bifurcation: for (k_1 < 0.9) all three variables synchronize; for (0.9 < k_1 < 1.1) mixed synchronization appears; for (k_1 > 1.1) all three become anti‑synchronized. The convergence speed of the error dynamics is faster for the synchronized component, while the anti‑synchronized components exhibit damped oscillations before settling. The multi‑frequency encoding allows three independent data streams to be transmitted simultaneously, effectively doubling the channel capacity compared with conventional chaos‑based communication that relies on a single synchronized variable.
Security Implications
The presence of anti‑synchronization adds a layer of obfuscation: an eavesdropper who intercepts the slave signal without knowledge of the sign inversion will recover the y‑ and z‑messages with inverted polarity, rendering a naïve demodulation ineffective. Moreover, because the transition between synchronization and anti‑synchronization can be controlled in real time by adjusting (k_1), the system can dynamically alter its security posture during a communication session without exchanging new cryptographic keys.
Conclusions and Future Work
The study confirms that a Generalized Lorenz system equipped with a simple diagonal nonlinear feedback can exhibit co‑existent synchronization and anti‑synchronization, and that this mixed state can be harnessed for robust, multi‑channel secure communication. The authors suggest extending the work to hardware implementation (e.g., analog circuits or FPGA), exploring networks with multiple masters and slaves, and testing the scheme over realistic wireless channels to assess latency, bandwidth, and resistance to active attacks.
In summary, the paper provides a novel theoretical framework and practical demonstration that mixed synchronization in chaotic systems offers both increased data throughput and enhanced cryptographic security, opening new avenues for chaos‑based communication technologies.
Comments & Academic Discussion
Loading comments...
Leave a Comment