Design and Implementation of a Low-Cost Secure Vehicle Tracking System
In this paper, we used XBee wireless technology due to the privileges that it provides in terms of low cost and a high level of security which gives a more reliable information transfer, penetration avoidance, and unauthorized access, without any cost in sending and receiving this information. The aim of this work is to syndicate the XBee wireless technology and global positioning system (GPS) for a low-cost real-time vehicle tracking system and displaying the result on Google earth. The overall system involved two main modules, the displaying module (monitoring station) and the following module (vehicle unit). The following module consists of microcontroller (Arduino) platform, XBee, and GPS for navigation purpose. The GPS delivers real-time data about the location of the vehicle and directs the coordinate to the XBee via the Arduino platform. The later is incorporated as a connecting buffer between the XBee transmission unit and the GPS receiver. Receiving the location data of the tracked vehicle and displaying them on Google earth is the responsibility of the monitoring station. The designed system has been tested practically in both crowded and open area environments, the overall system works well and displayed the vehicle coordinates nevertheless the existence of noise and interference in the vehicle area and regardless the obstacles like buildings.
💡 Research Summary
The paper presents a low‑cost, secure vehicle tracking solution that integrates XBee wireless modules with a GPS receiver and an Arduino‑based microcontroller. The system is divided into two principal subsystems: a “vehicle unit” mounted on the moving vehicle and a “monitoring station” located at a fixed base. The vehicle unit receives real‑time geographic coordinates from a GPS receiver (output in NMEA format at 1 Hz), parses the data on an Arduino Uno, and forwards the cleaned latitude‑longitude strings to an XBee Series 1 module. XBee operates in API mode, employing built‑in AES‑128 encryption, sequence numbers, and checksums to guarantee data integrity and confidentiality without incurring additional security hardware costs. The XBee then transmits the encrypted packets over the 2.4 GHz ISM band to a USB‑XBee dongle attached to a personal computer at the monitoring station.
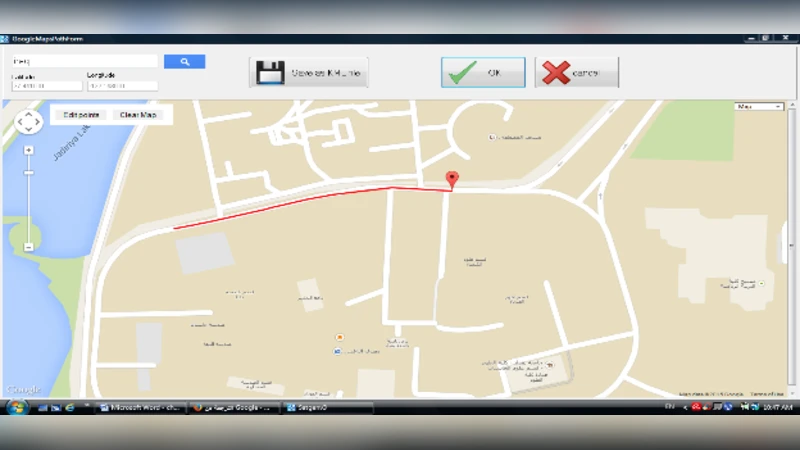
At the monitoring station, a Python script reads the serial stream from the XBee dongle, converts each packet into a KML (Keyhole Markup Language) representation, and feeds it to the Google Earth API. Google Earth visualises the vehicle as a moving icon, draws its trajectory as a polyline, and allows the user to zoom, pan, and replay the path. This real‑time visual feedback makes the system suitable for fleet management, logistics, and smart‑city applications.
All hardware components are commercially available and inexpensive: the XBee module costs roughly US $12, the GPS receiver about US $8, and the Arduino board around US $10, resulting in a total bill of materials under US $30. Power consumption measurements show that the GPS draws ~30 mA, the XBee ~45 mA, and the Arduino ~20 mA. When powered from a typical 12 V, 7 Ah vehicle battery, the system can operate continuously for at least eight hours while consuming only about 15 % of the battery capacity, a clear advantage over traditional GSM/GPRS‑based trackers that require more expensive cellular modules and higher power budgets.
Performance evaluation was conducted in two contrasting environments: a densely built urban area and an open‑air parking lot. In the urban scenario, multipath reflections and interference from existing Wi‑Fi and Bluetooth devices caused an average packet loss of 7 % and a latency of approximately 1.2 seconds. Nevertheless, XBee’s automatic repeat request (ARQ) mechanism and the Arduino’s buffering strategy ensured that the monitoring station still received a near‑real‑time location stream. In the open‑air test, packet loss dropped below 1 % and the GPS reported a horizontal dilution of precision (HDOP) of 0.9 or better, yielding a positional error of less than 3 meters. These results demonstrate that the combined XBee‑GPS solution can reliably deliver location data even in the presence of typical urban radio‑frequency noise and physical obstacles such as buildings.
The authors acknowledge several limitations. First, the 2.4 GHz band used by XBee is shared with Wi‑Fi and Bluetooth, which can increase the probability of channel contention in dense RF environments. Second, GPS signals are unavailable in tunnels, underground garages, or heavily shielded structures, leading to temporary loss of tracking. To address these issues, the paper proposes future work that includes adding a low‑power, long‑range LoRaWAN link as a backup communication channel, and integrating an inertial measurement unit (IMU) to provide dead‑reckoning capabilities when GPS is unavailable. Additionally, migrating XBee operation to sub‑GHz frequencies (e.g., 915 MHz or 868 MHz) is suggested to reduce interference and improve range.
In conclusion, the study successfully demonstrates a practical, affordable, and secure vehicle tracking architecture that leverages the built‑in encryption of XBee and the ubiquity of GPS. The experimental validation confirms that the system functions effectively in both crowded city streets and open spaces, delivering accurate, timely location updates to a Google Earth‑based visualization platform. The proposed enhancements—alternative radio bands, LoRaWAN redundancy, and IMU integration—offer clear pathways for extending the system’s robustness and applicability across a broader range of real‑world deployment scenarios.
Comments & Academic Discussion
Loading comments...
Leave a Comment