Multi-Step Knowledge-Aided Iterative ESPRIT for Direction Finding
In this work, we propose a subspace-based algorithm for DOA estimation which iteratively reduces the disturbance factors of the estimated data covariance matrix and incorporates prior knowledge which is gradually obtained on line. An analysis of the …
Authors: S. F. B. Pinto, R. C. de Lamare
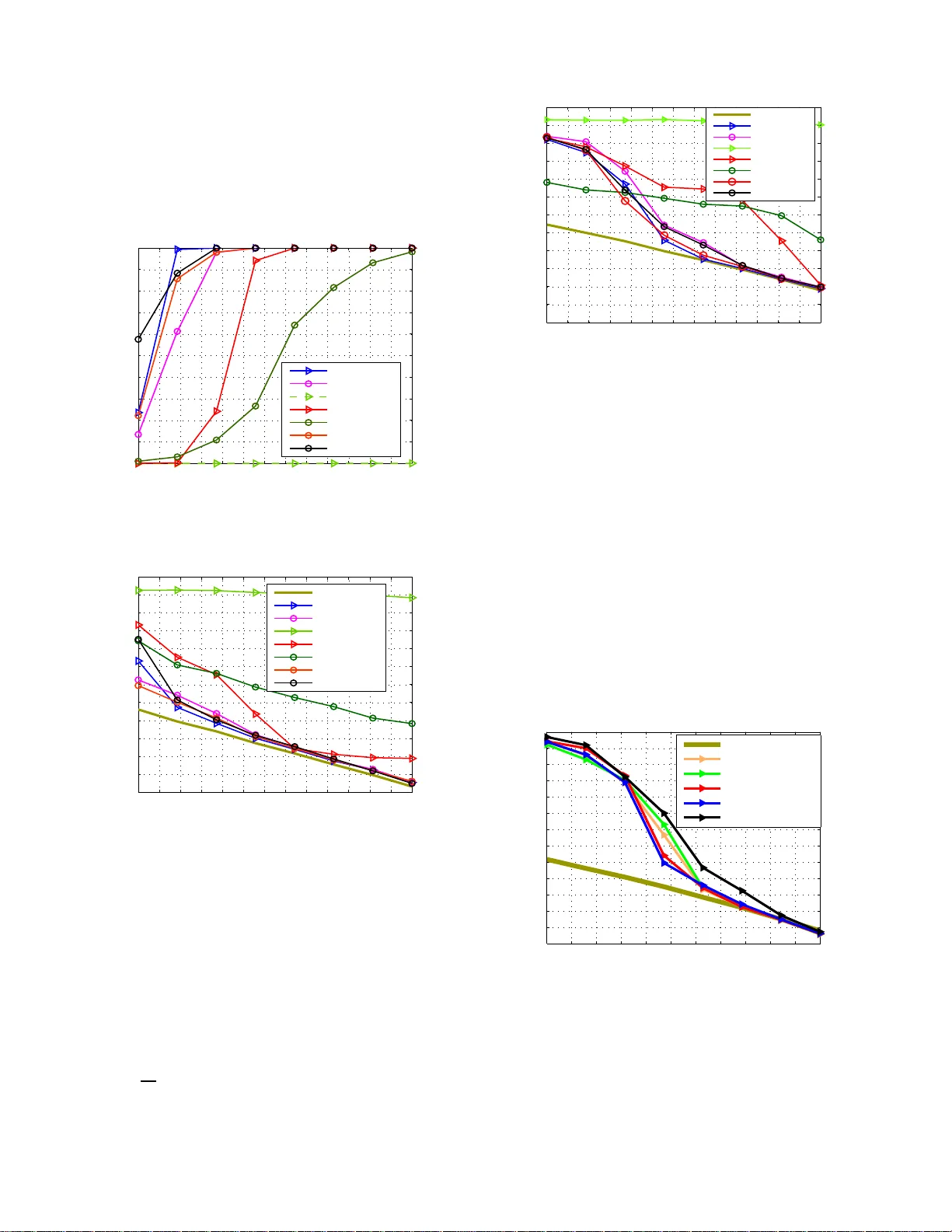
1 Multi-Step Kno wledge-Aided Iterati ve ESPRIT for Direction Finding Silvio F . B. Pinto 1 and Rodrigo C. de Lamare 1 , 2 Center for T elec ommunications St u d ies (CETUC) 1 Pontifical Catholic University of Rio de Ja neiro, RJ, Brazil. 2 Department of Electronics, University of Y ork, UK Emails: silviof@cetuc.puc -rio.br , delamare@ce tuc.puc-rio.br Abstract —In this work, we propose a subspace-based algo- rithm fo r DO A estimation which iteratively reduces the dis- turbance factors o f t he estima ted data co variance matrix and incorporates prior kno wledge which is gradually obtained on line. An a n alysis of the MSE of the reshaped d ata cov ariance matrix is carried out along with comparisons between computational complexities of the proposed and existing algorithms. Simulation s fo cusi ng on closely-spaced sources, where they are uncorrelated and correlated, illu strate the improv ements achieved. I . I N T RO D U C T I O N In array signal processing, d ir ection-of- arriv al (DO A) esti- mation is a key tas k in a b road range o f importan t app lications including radar an d son ar systems, wireless commun ications and seismology [1]. T raditional high-r esolution metho ds for DO A estimation such as the multiple signal classification (MUSIC) method [2], the roo t-MUSIC algo rithm [3], th e estimation of signal param eters via rotatio nal in variance tech- niques (ESPRIT) [4] and subsp ace techniques [5], [ 6], [7], [8], [9], [10], [11 ], [12], [26], [14], [15 ], [16], [17], [18], [19], [20], [21], [22], [23], [24], [ 25], [26], [27], [ 2 8], [29], [ 30], [3 1], [32], [33], [37], [35], [ 36], [37], [38], [ 3 9], [40], [ 41], [4 2], [43], [44], [45], [46], [ 47], [48], [49], [ 5 0], [51], [ 52], [5 3], [54], [5 5], [56],[5 7], [58], [5 9] exploit the eigenstructure of the input d ata ma trix. These techn iques may fail for red u ced data sets or lo w signal-to-no ise ratio (SNR) le vels where th e expected estimation e r ror is not asymptotic to the Cram ´ er- Rao b ound (CRB) [ 6 0]. The accuracy of the estimates of the covariance matrix is of f undamen tal impo rtance in p arameter estimation. Low lev els of SNR or short data r ecords can result in significant divergences between th e tru e and the sample data covariance matrices. In p ractice, only a modest number o f data snapshots is av ailab le and when the nu mber of snap sh ots is similar to the numb e r of sensor arr ay elements, the estimate d and the true subspaces can differ significantly . Sev eral approaches h av e b een de veloped with the aim of enhancin g the com putation of the c ovariance m a trix [6 1]-[70] and for dealing with large sensor-array systems large [ 71], [72], [73], [74], [75], [ 76], [77], [78], [ 7 9], [80], [ 81], [8 2], [83], [84], [85], [86], [ 87], [97], [88], [ 8 9], [90], [ 91], [9 2], [93], [9 4], [95], [96], [98], [99],[100], [1 01], [102], [103], [104], [10 5], [106], [1 11], [1 0 8], [109], [ 1 10], [111], [112], [113], [11 4], [1 1 5], [118], [11 7], [11 8], [119], [120]. Diagonal loading [61] and shrinkage [62], [63], [6 4] tech- niques can en hance the estimate o f the data covariance matrix by weighin g and individually increasing its dia g onal by a real constan t. Nevertheless, the eigenvectors remain the same, which leads to unaltered estimates of the signal an d noise projection matrices ob tained fr om the enhan ced covariance matrix. Add itionally , an improvement o f the estimates of the covariance matrix can be achieved by employing for- ward/backward a verag in g and spatial smoo th ing approa c hes [65], [66]. The former lead s to twice the nu mber o f the original samp les and its corre sp onding enhancem ent. The latter extracts the array cov arianc e matrix as the av erag e of all covariance matrices fr om its sub- arrays, resulting in a greater nu mber of samples. Both techniqu e s ar e employed in signal d ecorrelation . An approac h to improve MUSI C dealing with the con dition in which the nu mber of snapshots and the sen so r eleme n ts approac h in finity was presented in [6 7]. Nev er th eless, this technique is no t that effectiv e f or r educed number of snapshots. Oth er ap proach e s to deal with redu ced data sets or low SNR levels [68], [70] con sist o f reiterating th e proced u re of adding pseudo-n oise to the observations which results in new estimates of the covariance matrix. Th en, th e set of solution s is co m puted from pr eviously stored DOA estimates. In [ 1 21], two aspects resulting f rom the com putation of DO As for redu ced data sets or low SNR levels hav e been studied using the roo t-MUSIC techniq ue. The first aspect dealt with the probab ility o f estimated signal ro ots taking a smaller magnitude than th e estimated noise roots, wh ich is an anomaly th at lead s to wron g cho ices of the closest roots to the un it circ le . T o mitigate this pro blem, different group s of roots are con sidered as p otential so lu tions for the signal sour ces and the most likely one is selected [122]. The second aspect previously me n tioned, sho wn in [12 3], refers to the fact that a reduced part of the tru e sign al eig e nvectors exists in the sam p le noise subspace (an d vice -versa). Such coexistence h as b een expressed by a Frob enius n orm of the related irregularity m a tr ix an d in troduced its mathematical found ation. An iterative techniqu e to enhance the ef ficacy of root-MUSIC by reducing this anomaly makin g use of th e grad - ual reshaping of the sample d ata cov arian ce matrix has been reported . Inspired by the work in [ 121], we have developed an ESPRIT -based meth od known as T wo-Step KAI- ESPRIT (TS-ESPRIT) [ 124], which co mbines that modification s of the sample d a ta covariance matrix with the use of prior knowledge [125]-[131] a bout the covariance matrix of a set of imp inging signals to en hance the estimatio n accur a cy in th e finite sample size r egion . In p ractice, this prior k nowledge cou ld be from the signals co ming fro m known base stations o r fro m static users in a system. TS- ESPRIT deter mines the value of a correction factor that reduces the undesirable ter m s in the estimation of 2 the signal and noise subspaces in an iter ati ve process, resulting in better estimates. In this w ork [132], [133], we p resent the Multi-Step KAI ESPRIT (MS-KAI-ESPRIT) appr o ach that re fin es the covariance matrix of the input data via mu ltiple steps o f reduction of its u n desirable terms. This work pr esents the MS-KAI-ESPRIT in further detail, an analysis of th e mean squared error (MSE) o f the data covariance matrix free of undesired ter ms (side effects), a more accurate study of the computatio nal co mplexity and a compreh e nsi ve stud y of MS- KAI-ESPRIT and othe r com peting techniqu es for scenar ios with b oth uncor related and correlated signals. U n like TS- ESPRIT , which makes use of only one iteratio n and available known DO As, M S-KAI-ESPRIT employs mu ltiple iteratio ns and ob tains prior knowledge on line. At each iteration of MS- KAI-ESPRIT , the initial V andermo nde matr ix is upd ated by replacing an increasing numb er of steering vector s of initial estimates with their correspo nding refined versions. In other words, at each iter ation, the knowledge obtained on line is updated , allowing th e d ir ection finding algor ithm to co rrect th e sample covariance matrix estimate, wh ich y ields more accur ate estimates. In summary , this work has the following contributions: • The pr oposed MS- KAI-ESPRIT techniqu e. • An MSE analy sis o f the covariance matr ix o btained with the propo sed MS-KA I -ESPRIT alg orithm. • A comp rehensive performance study o f MS-KAI-ESPRIT and comp eting techn iques. This paper is organized as follows. Section I I describ es the system model. Section I II p resents the p roposed MS- KAI-ESPRIT algorithm. In section I V , an analytical study of the MSE o f the data covariance matrix free o f side- e ffects is carr ied o ut to gether with a study of the co mputation a l complexity o f th e prop o sed a n d competing a lg orithms. In Section V , we present a n d discuss th e simulation r e sults. Section VI co ncludes the paper . I I . S Y S T E M M O D E L Let us assum e that P nar rowband signals from far-field sources imp inge on a un iform linear array (ULA) of M ( M > P ) sensor elements f r om dir ections θ = [ θ 1 , θ 2 , . . . , θ P ] T . W e also consider th at the sensors are spaced fr om each other by a distance d ≤ λ c 2 , where λ c is the signal wa velength , and that without loss of g enerality , we h av e − π 2 ≤ θ 1 ≤ θ 2 ≤ . . . ≤ θ P ≤ π 2 . The i th d ata snapshot of the M -dimension al array ou tput vector can be modeled as x ( i ) = A s ( i ) + n ( i ) , i = 1 , 2 , . . . , N , (1) where s ( i ) = [ s 1 ( i ) , . . . , s P ( i )] T ∈ C P × 1 represents the zero- mean source data vector, n ( i ) ∈ C M × 1 is th e vector of white circular co mplex Gaussian n oise with z e r o mean and variance σ 2 n , and N den otes the number of available snapsh ots. The V andermond e matrix A ( Θ ) = [ a ( θ 1 ) , . . . , a ( θ P )] ∈ C M × P , kn own as the arra y manifold, contains the array steering vectors a ( θ j ) correspo nding to the n th source, which can be expr essed as a ( θ n ) = [1 , e j 2 π d λ c sin θ n , . . . , e j 2 π ( M − 1) d λ c sin θ n ] T , (2) where n = 1 , . . . , P . Using the fact that s ( i ) and n ( i ) are modeled as uncor related linearly indepen dent variables, th e M × M sign al cov ar ia n ce matrix is calcu lated by R = E x ( i ) x H ( i ) = A R ss A H + σ 2 n I M , (3) where th e superscrip t H an d E [ · ] in R ss = E [ s ( i ) s H ( i )] an d in E [ n ( i ) n H ( i )] = σ 2 n I M denote the Hermitian transposition and the expectation operator and I M stands fo r the M - dimensiona l iden tity matrix. Since the true signal covariance matrix is unk n own, it must be estimated and a widely -adopted approa c h is the samp le a verag e formula given by ˆ R = 1 N N X i =1 x ( i ) x H ( i ) , (4) whose estimation accu racy is dep endent o n N . I I I . P R O P O S E D M S - K A I - E S P R I T A L G O R I T H M In this section, we present the proposed MS-KAI-ESPRIT algorithm and detail its main fe a tures. W e star t by expan ding (4) using (1) as derived in [121]: ˆ R = 1 N N X i =1 ( A s ( i ) + n ( i )) ( A s ( i ) + n ( i )) H = A ( 1 N N X i =1 s ( i ) s H ( i ) ) A H + 1 N N X i =1 n ( i ) n H ( i ) + A ( 1 N N X i =1 s ( i ) n H ( i ) ) + ( 1 N N X i =1 n ( i ) s H ( i ) ) A H | {z } ” undesirableterm s ” (5) The first two terms of ˆ R in (5) can be con sidered as estimate s of the two summan ds of R given in (3), which represent the sign al and the n oise com ponents, respectively . The last two terms in (5) are un desirable side effects, which can be seen as estimates fo r the cor relation between the signal and the no ise vectors. The system model un der study is based on noise vectors which ar e zero-mean and also ind ependen t of the signal vectors. Thus, the signal an d n oise componen ts are un correlated to each other . As a co nsequence , for a large enoug h number of samples N , the last two ter ms of (5) tend to zero. Nevertheless, in p ractice the numb er of available samp les can be limited. In such situation s, the last two terms in (5) may have significan t values, wh ich causes the deviation of th e estimates of the signal and the noise subspaces fro m the true signal and no ise sub sp aces. The key poin t of the propo sed MS-K A I -ESPRIT algorith m is to mod if y the sample d ata cov ar iance matrix estimate at e ach iteration by gradually incorp o rating the knowledge pr ovid ed by the n ewer V andermond e matr ices w h ich pro gressiv ely em- body the refine d estimates f rom the pr eceding iteration . Based on these u pdated V and ermonde matr ices, refined estimates of the projection matrices of the signal and n oise sub spaces ar e calculated. These estimates of projection m a tr ices associated with the initial sample covariance matrix estimate and the reliability factor are employed to r educe its side effects and allow the a lg orithm to choose the set of estimates that has the h ighest likelihoo d of being the set of the true D OAs. Th e modified covariance matrix is c o mputed by comp u ting a scaled version o f the und esirable terms of ˆ R , as p ointed out in ( 5). 3 The steps o f the pr oposed algor ithm are listed in T ab le I. The algo rithm starts by comp uting the sample data covariance matrix (4). Next, the DO As are estimated using the ESPRIT algorithm . T he su perscript ( · ) (1) refers to the estimation task perfor med in the first step. N ow , a proced ure consisting of n = 1 : P iter ations starts b y for ming the V an dermond e matrix using the DOA estima tes. Then , the amp litudes of th e sou r ces are estimated such that the sq u are n orm of th e differences between the observation vector and the vector containin g estimates and the av ailable known DOAs is m inimized. This problem can be formulated [121] as: ˆ s ( i ) = ar g min s k x ( i ) − ˆ A s k 2 2 . (6) The min imization of (6) is achieved using the least squ ares technique and th e solu tion is described by ˆ s ( i ) = ( ˆ A H ˆ A ) − 1 ˆ A x ( i ) (7) The noise com ponent is then estimated as th e dif fer ence between the estimate d signal and the observations mad e b y the arra y , as given by ˆ n ( i ) = x ( i ) − ˆ A ˆ s ( i ) . (8) After estimating th e sig nal an d no ise vectors, the thir d term in (5) c a n be co mputed as: V , ˆ A ( 1 N N X i =1 ˆ s ( i ) ˆ n H ( i ) ) = ˆ A ( 1 N N X i =1 ( ˆ A H ˆ A ) − 1 ˆ A H x ( i ) × ( x H ( i ) − x H ( i ) ˆ A ( ˆ A H ˆ A ) − 1 ˆ A H ) o = ˆ Q A ( 1 N N X i =1 x ( i ) x H ( i ) I M − ˆ Q A ) = ˆ Q A ˆ R ˆ Q ⊥ A , (9) where ˆ Q A , ˆ A ( ˆ A H ˆ A ) − 1 ˆ A H (10) is an estimate of th e projection m atrix o f the signal subspace, and ˆ Q ⊥ A , I M − ˆ Q A (11) is an estimate of the projection matrix o f the noise sub sp ace. Next, as par t of the proced ure consisting of n = 1 : P iterations, the modified data covariance m a trix ˆ R ( n +1) is obtained by comp uting a scaled version of the estimated ter ms from the initial sample d ata covariance matrix as g iv en by ˆ R ( n +1) = ˆ R − µ ( V ( n ) + V ( n ) H ) , (12) where the sup erscript ( · ) ( n ) refers to the n th iteration pe r- formed . The scaling or reliability facto r µ in creases from 0 to 1 incrementa lly , r esulting in modified data covariance matrices. Each of them gives origin to new estimated DO As also denoted by the superscript ( · ) ( n +1) by using th e ESPRIT algor ith m, as briefly describ e d ahe ad. In this work, the rank P is assumed to be known, wh ich is an assumption frequ ently found in the literature. Alternatively , the rank P could be estimated by model-ord er selection schemes such as Akaike´s Info rmation Theoretic Criterion ( A I C) [14 4] and the Minim u m Descriptive Length (MDL) Criterion [1 45]. In or der to estimate the signal and the o rthogo nal subspac es from the data records, we may co n sider two ap proach e s [146], [ 147]: the direct data a p proach an d the cov arian ce approa c h . The direct data appro ach makes use of singular value dec omposition( SVD) of th e data m atrix X , com p osed of the i th d ata snapsho t (1) of the M -dimensiona l array data vector: X =[ x (1) , x (2) , . . . , x ( N )] = A [ s (1) , s (2 ) , . . . , s ( N )] + [ n (1) , n (2) , . . . , n ( N )] = A (Θ) S + N ∈ C M × N (13) Since the num ber of th e sources is a ssum ed k nown or can b e estimated by A I C[144] o r MDL[14 5] , as p reviously mentioned , we can wr ite X as: X = ˆ U s ˆ U n ˆ Γ s 0 0 ˆ Γ n ˆ U H s ˆ U H n , (14) where the diago nal ma tr ices ˆ Γ s and ˆ Γ n contain th e P largest singular values an d the M − P smallest singular values, respectively . The estima ted sig n al subspace ˆ U s ∈ C M × P consists of the sing ular vectors correspo nding to ˆ Γ s and the orthog onal su bspace ˆ U n ∈ C M × ( M − P ) is related to ˆ Γ n . I f the signal subspace is estimated a rank- P ap proximatio n of the SVD can be ap plied. The covariance approach applies the eig en value decompo- sition (EVD) of th e samp le covariance matrix (4 ), which is related to the data ma trix (13): ˆ R = 1 N N X i =1 x ( i ) x H ( i ) = 1 N X X H ∈ C M × M (15) Then, the EVD o f (15) can be car ried o ut as fo llows: ˆ R = ˆ U s ˆ U n ˆ Λ s 0 0 ˆ Λ n ˆ U H s ˆ U H n , (16) where the diagonal matrices ˆ Λ s and ˆ Λ n contain th e P largest and the M-P smallest e igen values, respectively . The estimated signal subspace ˆ U s ∈ C M × P correspo n ding to ˆ Γ s and the orthog onal subspace ˆ U n ∈ C M × ( M − P ) complies with ˆ Γ n . If the signal subspace is estimated a ra n k-P appro x imation of the EVD can be applied . W ith in fin ite precision arithmetic, both SVD an d EVD c a n b e consider ed eq uiv alent. Howe ver, as in practice, finite p recision ar ithmetic is emp loyed, ’ squarin g’ the data to o btain the Gramian X X H (15) can result in rou n d-off errors an d overflow . These a r e po tential p r oblems to be aware when using the covariance ap proach. Now , we can briefly revie w ESPRIT . W e start by for ming a twofold subarr ay config u ration, as ea c h row of the array steering matrix A ( Θ ) cor r esponds to one sensor element of the antenna array . The sub arrays ar e sp ecified b y two ( s × M ) - dimensiona l selection matrices J 1 and J 2 which ch oose s elements of the M existing sensors, respe cti vely , where s is in th e rang e P ≤ s < M . For max im um overlap, the matr ix J 1 selects the first s = M − 1 elements a n d the matrix J 2 selects the last s = M − 1 rows o f A ( Θ ) . 4 Since the m atrices J 1 and J 2 have now been co mputed, we can estimate the operato r Ψ by solving the approximatio n of the shift inv arian c e equ ation ( 17) giv en by J 1 ˆ U s Ψ ≈ J 2 ˆ U s . (17) where ˆ U s is ob tained in (16). Using the least sq uares (LS) metho d, wh ich yields ˆ Ψ = arg min Ψ k J 2 ˆ U s − J 1 ˆ U s Ψ k F = J 1 ˆ U s † J 2 ˆ U s , ( 1 8) where k · k F denotes the Frobenius no rm and ( · ) † stands for the pseud o-inv er se. Lastly , the eig en values λ i of ˆ Ψ con tain the estimates o f the spatial freq uencies γ i computed as: γ i = ar g ( λ i ) , (19) so that the DO As can b e calculated as: ˆ θ i = ar csin γ i λ c 2 π d (20) where for (1 9) and (20) i = 1 , · · · , P . Then, a new V and ermond e matrix ˆ B ( n +1) is for m ed by the steering vectors of th ose refin e d estimates o f the DOAs. By using this u pdated matrix , it is possible to comp ute the refined estimates of th e p rojection matrices of the signal ˆ Q ( n +1) B and the no ise ˆ Q ( n +1) ⊥ B subspaces. Next, emp loying the refined estima te s of the p rojection matrices, the in itial samp le data matrix , ˆ R , and the number of sensors an d sources, the stoch astic m aximum likelihood objective function U ( n + 1 ) ( µ ) [122] is c o mputed for each value of µ at the n th iteration, as follows: U ( n + 1 ) ( µ ) = ln det ˆ Q ( n +1) B ˆ R ˆ Q ( n +1) B + T race { ˆ Q ⊥ ( n +1) B ˆ R } M − P ˆ Q ( n +1) ⊥ B . (21) The previous compu tatio n selects the set of unavailable DO A estimates th at have a higher likelihood at each itera- tion. Then , th e set o f estimated DOAs correspo n ding to the optimum value o f µ that minimizes (2 1) also at ea ch n th iteration is de termined. Finally , th e output of the pr oposed MS- KAI-ESPRIT alg orithm is fo r med by the set of the estimates obtained at the P th iteration, as describe d in T able I. I V . A N A L Y S I S In this sectio n , we carry out an analy sis of the MSE o f the data c ovariance ma tr ix fr ee of side effects along with a study of th e com putational complexity of the p roposed MS-KAI- ESPRIT and existing dir ection fin ding algorithms. A. MSE An alysis In this sub section we show that at the fir st of the P iterations, the MSE of the d ata covariance matrix fr ee of side effects ˆ R ( n +1) is less than or eq u al to the MSE of th at of the original one ˆ R . Th is can be formulated as: MSE ˆ R ( n +1) ≤ MSE ˆ R (22) or , alter n ativ ely , as MSE ˆ R ( n +1) − MSE ˆ R ≤ 0 (23) The proo f of th is inequality is provided in the Appendix. T ABLE I P R O P O S E D M S - K A I - E S P R I T A L G O R I T H M Inputs: M , d , λ , N , P Recei ved vectors x (1) , x (2) , · · · , x ( N ) Outputs: Estimates ˆ θ ( n + 1 ) 1 ( µ opt ) , ˆ θ ( n + 1 ) 2 ( µ opt ) , · · · , ˆ θ ( n + 1 ) P ( µ opt ) First step: ˆ R = 1 N N P i =1 x ( i ) x H ( i ) { ˆ θ (1) 1 , ˆ θ (1) 2 , · · · , ˆ θ (1) P } E S P R I T ← − − − − − − ( ˆ R , P, d, λ ) ˆ A (1) = h a ( ˆ θ ( 1 ) 1 ) , a ( ˆ θ ( 1 ) 2 ) , · · · , a ( ˆ θ ( 1 ) P ) i Second step : fo r n = 1 : P ˆ Q ( n ) A = ˆ A ( n ) ( ˆ A ( n ) H ˆ A ( n ) ) − 1 ˆ A ( n ) H ˆ Q ( n ) ⊥ A = I M − ˆ Q ( n ) A V ( n ) = ˆ Q ( n ) A ˆ R ˆ Q ( n ) ⊥ A fo r µ = 0 : ι : 1 ˆ R ( n +1) = ˆ R − µ ( V ( n ) + V ( n ) H ) { ˆ θ ( n +1) 1 , ˆ θ ( n +1) 2 , · · · , ˆ θ ( n +1) P } E S P R I T ← − − − − − − ( ˆ R ( n +1) , P , d, λ ) ˆ B ( n +1) = h a ( ˆ θ ( n + 1 ) 1 ) , a ( ˆ θ ( n + 1 ) 2 ) , · · · , a ( ˆ θ ( n + 1 ) P ) i ˆ Q ( n +1) B = ˆ B ( n +1) ( ˆ B ( n +1) H ˆ B ( n +1) ) − 1 ˆ B ( n +1) H ˆ Q ( n +1) ⊥ B = I M − ˆ Q ( n +1) B U ( n + 1 ) ( µ ) = ln det ( · ) , ( · ) = ˆ Q ( n +1) B ˆ R ˆ Q ( n +1) B + T race { ˆ Q ⊥ ( n +1) B ˆ R } M − P ˆ Q ( n +1) ⊥ B ! µ ( n +1) opt = arg min U ( n + 1 ) ( µ ) DOAs ( n +1) = ( ∗ ) , ( ∗ ) = { ˆ θ ( n + 1 ) 1 ( µ opt ) , ˆ θ ( n + 1 ) 2 ( µ opt ) , · · · , ˆ θ ( n + 1 ) P ( µ opt ) } ˆ A ( n +1) = n a ( ˆ θ ( n + 1 ) { 1 , ··· , n } ) o S n a ( ˆ θ ( 1 ) { 1 , ··· , P } − { 1 , ··· , n } ) o end for end for B. Compu tational Comp lexity An alysis In this section, w e ev aluate the computatio nal cost of the pro posed MS-KAI-ESPRIT algo r ithm which is compare d to the f ollowing classical subsp ace m e thods: ESPRIT [4], MUSIC [2], Root-M USIC [ 3], Conjug ate Gradient ( CG) [ 138], Auxiliary V ector Filterin g (A VF) [13 9] and TS-ESPRIT [ 124]. The ESPRIT and MUSIC-based m ethods use the Sing ular V alue Decomp o sition ( SVD) of the sample covariance matr ix (4). The co mputationa l complexity o f MS-KAI-E SPRIT in terms of num ber of multiplications and addition s is d epicted in T able II, where τ = 1 ι + 1 . The incremen t ι is defined in T able I. As c an b e seen, for th is specific configu ration u sed in the simulatio n s V MS-KAI-ESPRIT shows a relatively high computatio nal burden with O ( P τ ( 3M 3 + 8MN 2 )) , where τ is ty pically a n integer that ranges from 1 to 20 . It can be noticed th at fo r the configur ation used in th e simu latio ns 5 ( P = 4 , M = 40 , N = 2 5 ) 3 M 3 and 8 M N 2 are compar able, resulting in two domin ant terms. It can also be seen that the number of multiplicatio ns requir e d by the pr oposed algo r ithm is more significan t than the numbe r o f ad ditions. For this reason, in T able II I, we comp uted only the co mputation a l burden of the previously mention e d algorith m s in terms o f multiplications for th e p u rpose o f co mparisons. In th a t table, ∆ stands fo r the search step. Next, we will evaluate the influence of the number of sensor elemen ts on the number of mu ltiplications based on the specific configur ation described in T able II. Supposing P = 4 n arrowband signals imp inging a ULA of M sensor elements an d N = 2 5 av ailable sn apshots, we ob tain Fig. 1. W e can see the ma in trend s in terms of computational cost measured in mu ltip lications of the pr oposed and an alyzed algorithm s. By examining Fig. 1, it can be n oticed that in th e range M = [20 7 0] sensors, the curves describing th e exact number o f multiplication s in MS-KAI-ESPRIT and A VF ten d to merge. For M = 40 , this ratio ten ds to 1 , i.e. the num ber of multiplicatio n s a r e almost equiv alent. T ABLE II C O M P U TA T I O NA L C O M P L E X I T Y - M S - K A I - E S P R I T Multipl ications P τ [ 10 3 M 3 + M 2 (3P + 2) + M ( 5 2 P 2 + 1 2 P + 8N 2 ) MS-KAI +P 2 ( 17 2 P + 1 2 )] -ESPRIT (Proposed) +P [2M 3 + M 2 (P) + M( 3 2 P 2 + 1 2 P) + P 2 ( P 2 + 3 2 )] +2M 2 (P) + M (P 2 − P + 8N 2 ) + P 2 (8P − 1) Addition s P τ [ 10 3 M 3 + M 2 (3P − 1) + M ( 5 2 P 2 − 9 2 P + 8N 2 ) +P(8P 2 − 2P − 5 2 )] +P [2M 3 + M 2 (P − 2) + M ( 3 2 P 2 − 1 2 P) − P(P + 1 2 )] +2M 2 (P) + M (P 2 − 4P + 8N 2 ) + P(8P 2 − P − 2) T ABLE III C O M P U TA T I O NA L C O M P L E X I T Y - O T H E R A L G O R I T H M S Algorith m Multipl ications MUSIC [2] 180 ∆ [M 2 + M(2 − P) − P] + 8MN 2 root-MUSIC[3] 2M 3 − M 2 P + 8MN 2 A VF [139] 180 ∆ [M 2 (3P + 1) + M (4P − 2) + P + 2] +M 2 N CG [138] 180 ∆ [M 2 (P + 1) + M (6P + 2) + P + 1] + M 2 N ESPRIT[4] 2M 2 P + M(P 2 − 2P + 8N 2 ) + 8P 3 − P 2 τ [ 3M 3 + M 2 (3P + 2) + M ( 5 2 P 2 − 3 2 P + 8N 2 ) +P 2 ( 17 2 P + 1 2 ) + 1] TS-ESPRIT [124]* +[ 2M 3 + M 2 (3P) + M( 5 2 P 2 − 3 2 P + 8N 2 ) +P 2 ( 17 2 P + 1 2 )] V . S I M U L A T I O N S In this section, we examin e the p erform a nce o f the pro posed MS-KAI-ESPRIT in terms o f pro bability of resolution and RMSE and compare them to th e standard ESPRIT [4], the Iterative ESPRIT (I ESPRIT), wh ich is also dev elop ed here by combin ing the app r oach in [121] that exploits k nowledge of the structure of the c ovariance m atrix and its p e rturbation terms, the Con jugate Gradient (CG) [138], the Roo t-MUSIC 5 10 15 20 25 30 35 40 45 50 55 60 65 70 75 80 85 90 95 100 10 4 10 5 10 6 10 7 10 8 10 9 Number of sensors Number of multiplications as powers of 10 MUSIC Root−MUSIC[3] ESPRIT[4] TS−ESPRIT[20]* MS−KAI−ESPRIT CG[33] AVF[34] Fig. 1. Number of multiplic ations as powers of 10 versus number of sensors for P = 4 , N = 25 . [3], and the MUSI C [2] algorithm s. Despite TS- ESPRIT is based o n the knowledge of available known DOAS and the propo sed MS- K AI -ESPRIT d oes not have access to prior knowledge, TS-ESPRIT is plotted with the aim o f illustrating the co mparisons. For a fair comparison in terms of RMSE and p robability of resolu tion of all studied algorithm s, we suppose that we do no t have prio r knowledge, that is to say that although we have available known DOAs, we compute TS-ESPRIT as th ey were unavailable. W e em ploy a ULA with M=40 sensors, inter-element spacing ∆ = λ c 2 and assume ther e ar e four u ncorrelate d com plex Gaussian signals with equal power imp inging o n the array . Th e clo sely-spaced sources ar e separated by 2 . 4 o , at (10 . 2 o , 12 . 6 o , 15 o , 17 . 4 o ) , and the number of a vailable snap sh ots is N =25. For TS- ESPRIT , as p reviously mentio ned, we presume a priori kn owl- edge of the last true DO AS (1 5 o , 17 . 4 o ) In Fig. 2, we show the pro bability o f resolutio n versu s SNR. W e take into account the criterion [141], in which two sources with DOA θ 1 and θ 2 are said to be r esolved if their respective estimates ˆ θ 1 and ˆ θ 2 are such that both ˆ θ 1 − θ 1 and ˆ θ 2 − θ 2 are less th an | θ 1 − θ 2 | / 2 . The p roposed MS- KAI-ESPRIT alg orithm ou tperform s IESPRIT developed her e , based on [121], an d the standard ESPRIT [4] in the range between − 6 and 5 dB an d M USIC [2] from − 6 to 8 . 5 dB . MS- KAI-ESPRIT also outper f orms CG [13 8] and Root-Music [3] throug hout the whole rang e of values. The p o or perfo rmance of the latter co uld be expected from the r esults for two closed signals obtained in [121]. When compar e d to TS-ESPRIT , which as previously discussed, was supposed to ha ve the best perfo rmance, the pro posed MS-KAI-ESPRIT algorithm is ou tperform ed b y the for mer o nly in the range between − 6 and − 2 dB . From this last po int to 20 dB its perfor m ance is superior or equ al to the other algor ithms. In Fig. 3, it is sh own the RMSE in d B versus SNR, where the term CRB r e fers to the squ are roo t of the determ inistic Cram ´ er - Rao bound [142]. The RMSE is defined as: RMSE = v u u t 1 L P L X l =1 P X p =1 ( θ p − ˆ θ p ( l )) 2 , (24) where L is the n umber of trials. 6 The results show th e superior perfor mance of MS-KAI- ESPRIT in th e rang e b etween − 2 . 5 an d 5 dB. Fr om this last point to 20 dB, MS-KAI-ESPRIT , IESPRIT , ESPRIT and TS- ESPRIT have similar perfo rmance. The only rang e in which MS-KAI-ESPRIT is outper formed lies in the r a nge between − 6 an d − 2 . 5 dB. From this last p oint to 20 dB its perf ormance is better o r similar to the others. −6 −4 −2 0 2 4 6 8 10 12 14 16 18 20 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 SNR(dB) Probability of Resolution MS−KAI−ESPRIT ESPRIT [4] Root−MUSIC [3] MUSIC [2] CG [33 ] IESPRIT [17] TS−ESPRIT[20]* Fig. 2. Probability of resolut ion versus SNR with P = 4 uncorrela ted sources, M = 40 , N = 25 , L = 100 runs −6 −4 −2 0 2 4 6 8 10 12 14 16 18 20 −18 −15 −12 −9 −6 −3 0 3 6 9 12 15 18 SNR(dB) RMSE (dB) CRB MS−KAI−ESPRIT ESPRIT [4] Root−MUSIC [3] MUSIC [2] CG [33] IESPRIT [17] TS−ESPRIT [20]* Fig. 3. RMSE and the square root of CRB versus SNR with P = 4 uncorrel ated sources, M = 40 , N = 25 , L = 100 runs Now , we focus on the perfo rmance o f MS-KAI-ESPRIT under more severe cond itio ns, i.e ., we analyze it in term s o f RMSE when at least two o f the four equ al-powered Gaussian signals a r e stro n gly co r related, as shown in the following signal correlatio n matr ix R ss (25): R ss = σ 2 s 1 0 . 9 0 . 6 0 0 . 9 1 0 . 4 0 . 5 0 . 6 0 . 4 1 0 0 0 . 5 0 1 . (25) The signal-to-no ise ratio ( S N R ) is defined as S N R , 10 log 10 σ 2 s σ 2 n . In Fig . 4, we can see the perfor mance of the same algo rithms p lo tted in Fig. 3 in terms o f RMSE(dB) versus SNR computed afte r 250 runs, when the sig n al co rre- lation matrix is given by (25). As can be seen, the supe rior perfor mance of MS-KAI -ESPRIT occur s in the wh ole ra nge −6 −4 −2 0 2 4 6 8 10 12 14 16 18 20 −18 −15 −12 −9 −6 −3 0 3 6 9 12 15 18 SNR (dB) RMSE (dB) CRB MS−KAI−ESPRIT ESPRIT [4] Root−MUSIC [3] MUSIC [2] CG [33] IESPRIT [17] TS−ESPRIT [20]* Fig. 4. RMSE and the square root of CRB versus SNR with P = 4 correlated sources, M = 40 , N = 25 , L = 250 runs between 4 . 0 and 12 dB , which can be considere d a small but consistent gain . From 12 dB to 20 d B MS-KAI-ESPRIT , TS-ESPRIT , I ESPRIT and E SPRIT have similar per formanc e. The values fo r which MS-KAI-E SPRIT is outperform ed are in the ran ge b e tween − 6 . 0 and 4 . 0 dB. In Fig. 5, we hav e provid ed fur th er simulation s to illustra te the perfor mance of each iteratio n of MS-KAI ESPRIT in terms of RMSE. The resulting iter ations can be compar e d to each oth e r and to the the orig inal ESPRIT , which corre sp onds to the first step of M S-KAI ESPRIT . For this purpo se, we have co n sidered the same scen ario emp loyed before, except for the num ber of th e trials, which is L = 200 run s for all simulations. In particular, we have con sidered the case of correlated sou rces. Fro m Fig. 6, which is a magn ified detail of Fig. 5, it can be seen th at the estimates be c o me more accura te with the incr ease o f iterations. −6 −4 −2 0 2 4 6 8 10 12 14 16 −12 −10 −8 −6 −4 −2 0 2 4 6 8 10 12 14 SNR(dB) RMSE(dB) CRB 4th iteration(n=P=4) 3rd iteration(n=3) 2nd iteration(n=2) 1st iteration(n=1) ESPRIT− first step Fig. 5. RMSE for each iterati on of MS-KAI ESPRIT ,origina l ESPRIT and CRB versus SNR with P = 4 correlat ed sources, M = 40 , N = 25 , L = 200 runs V I . C O N C L U S I O N S W e have propo sed the MS-KAI-ESPRIT algo rithm which exploits the knowledge of sou rce signals obtain ed on line and the struc tu re of the covariance matrix and its p erturba- tions. An an alytical study o f th e MSE of this matrix free of side effects has shown th at it is less or equal th an the 7 4 5 6 7 8 9 10 11 12 13 −9 −8 −7 −6 −5 −4 SNR(dB) RMSE(dB) CRB 4th iteration(n=P=4) 3rd iteration(n=3) 2nd iteration(n=2) 1st iteration(n=1) ESPRIT−first step Fig. 6. RMSE for each iteration of MS-KAI ESPRIT ,origina l ESPRIT and CRB versus SNR with P = 4 correlat ed sources, M = 40 , N = 25 , L = 200 runs -magnificat ion MSE o f th e o r iginal matrix, resulting in better performan ce of MS-KAI -ESPRIT esp ecially in scen a rios wh ere limited number of samples are available. The proposed M S- KAI- ESPRIT alg orithm can obtain significan t gains in RMSE o r probab ility of resolution pe r forman c e over previously repo rted technique s, an d has e x cellent potential for applications with short data reco r ds in large-scale antenn a systems for wir eless commun ications, radar an d other large sensor arr ays. The rela- ti vely hig h comp utational burden requ ired, wh ich is associated with extra matrix multiplication s, the incremen t ι ap plied to reduce the undesirab le side effects an d the iteration s needed to progr essi vely inco rporate th e knowledge obtain e d on lin e a s newer estimates can b e justified for the sup erior perform ance achieved. Futu re work will consider approaches to reducing the com putational co st. A P P E N D I X Here, we pr ove the inequality (23) descr ib ed in Section IV -A. W e start by expressing the MSE of the orig inal d ata covariance m atrix (4) as: MSE ˆ R = E h k ˆ R − R k 2 F i . (26) where R is the true covariance matrix . Similarly , the MSE of the data cov ar ia n ce matrix free of side effects ˆ R ( n +1) can be expressed f or the first iteration n = 1 by making u se o f (12), as follows MSE ˆ R ( n +1) n =1 = MSE ˆ R (2) = E h k ˆ R (2) − R k 2 F i = E h k ˆ R − µ ( V (1) + V (1) H ) − R k 2 F i = E h k ˆ R − R − µ ( V (1) + V (1) H ) k 2 F i (27) where for the sake of simplicity , fro m now on we o mit the superscript (1) , which refers to the first iter ation. In order to exp and the result in (27), we make use of the fo llowing propo sition: Lemma 1 : The squared Frobenius norm o f the difference between any two m atrices A ∈ C m × m and B ∈ C m × m is giv en by k A − B k 2 F = k A k 2 F + k B k 2 F − T r A H B + T r AB H (28) Proof of Le m ma 1 : The Frobeniu s nor m of any D ∈ C m × m matrix is defined [1] as k D k F = m X i =1 m X j =1 | d ij | 2 1 2 = T r D H D 1 2 (29) W e exp r ess D as a d ifference between two matrice s A and B , both also ∈ C m × m . M aking use of Lemma1 a n d the prop erties of the tra c e, we obtain k A − B k 2 F = T r h ( A − B ) H ( A − B ) i = T r A H − B H ( A − B ) = T r A H A − T r A H B − T r B H A + T r B H B = k A k 2 F + k B k 2 F − T r A H B + T r AB H , (30) which is the desired result. Now , a ssuming that the true R [13 4] and the data covariance matrices ˆ R [13 4] are Hermitian an d using ( 2 7) combin ed with Lemma1, the cyclic [1 3 5] property of the trace and th e linearity [13 6] pro perty of the expected value, we get MSE ˆ R (2) = E n k ˆ R − R k 2 F + µ 2 k V + V H k 2 F − T r ˆ R − R H µ V + V H − T r h µ V + V H H ˆ R + R io = E n k ˆ R − R k 2 F + µ 2 k V + V H k 2 F − µ T r ˆ R − R H V + V H − µ T r h V + V H H ˆ R + R io = E n k ˆ R − R k 2 F + µ 2 k V + V H k 2 F − µ T r h ˆ R − R V + V H i − µ T r h V H + V ˆ R + R io = E n k ˆ R − R k 2 F + µ 2 k V + V H k 2 F − µ T r h ˆ R − R V + V H i − µ T r h ˆ R + R V + V H io = E n k ˆ R − R k 2 F o + µ 2 E k V + V H k 2 F − 2 µ E n T r h ˆ R − R V + V H io = MSE ˆ R + µ 2 E k V + V H k 2 F − 2 µ E n T r h ˆ R − R V + V H io (31) By m oving th e first summand of ( 31) to its first element, we obtain the inten ded expression f o r the difference b etween the M S E s o f the d a ta covariance matrix fr ee of pertu rbations a n d the original o n e, i.e. : 8 MSE ˆ R ( n +1) n =1 − MSE ˆ R = µ 2 E k V + V H k 2 F − 2 µ E n T r h ˆ R − R V + V H io . (32) Now , we expand the expressions inside brace s of the secon d member of (32) in d i v idually . W e start with the first summan d k V + V H k 2 F = k V k 2 F + k V H k 2 F + T r V H V H + T r ( V H ) H V = k V k 2 F + k V H k 2 F + T r V H V H + T r ( VV ) . (33) The equation (33) can be com puted by using the projection matrices of th e signal an d the no ise sub spaces and th e data covariance matrix by using (9), ( 11), the idempo tence [1] [1 3 5] of ˆ Q A and the cyclic p roperty [135] of the trace. Startin g with the com putation o f its fourth summan d, we hav e T r ( VV ) = T r h ˆ Q A ˆ R ˆ Q ⊥ A ˆ Q A ˆ R ˆ Q ⊥ A i = T r h ˆ Q A ˆ R I M − ˆ Q A ˆ Q A ˆ R I M − ˆ Q A i = T r h ˆ Q A ˆ R − ˆ Q A ˆ R ˆ Q A ˆ Q A ˆ R − ˆ Q A ˆ R ˆ Q A i = T r h ˆ Q A ˆ R ˆ Q A ˆ R − ˆ Q A ˆ R ˆ Q A ˆ R ˆ Q A − ˆ Q A ˆ R ˆ Q A ˆ Q A ˆ R + ˆ Q A ˆ R ˆ Q A ˆ Q A ˆ R ˆ Q A i = T r ˆ Q A ˆ R ˆ Q A ˆ R − T r ˆ Q A ˆ R ˆ Q A ˆ R ˆ Q A − T r ˆ Q A ˆ R ˆ Q A ˆ Q A ˆ R + T r ˆ Q A ˆ R ˆ Q A ˆ Q A ˆ R ˆ Q A = T r ˆ Q A ˆ R ˆ Q A ˆ R − T r ˆ Q A ˆ R ˆ Q A ˆ R − T r ˆ Q A ˆ R ˆ Q A ˆ R + T r ˆ Q A ˆ R ˆ Q A ˆ R = 0 . (34) T aking into account that th e data covariance matr ix ˆ R and the estimate of the p rojection matrix of the noise subspace ˆ Q ⊥ A are Herm itian, we can e valuate the third sum mand of (3 3) as follows: T r V H V H = T r ˆ Q A ˆ R ˆ Q ⊥ A H ˆ Q A ˆ R ˆ Q ⊥ A H = T r ˆ Q ⊥ A H ˆ R H ˆ Q H A ˆ Q ⊥ A H ˆ R H ˆ Q H A = T r nh ˆ Q ⊥ A ˆ R ˆ Q A i h ˆ Q ⊥ A ˆ R ˆ Q A io = T r nh I M − ˆ Q A ˆ R ˆ Q A i h I M − ˆ Q A ˆ R ˆ Q A io = T r nh ˆ R ˆ Q A − ˆ Q A ˆ R ˆ Q A i h ˆ R ˆ Q A − ˆ Q A ˆ R ˆ Q A io = T r n ˆ R ˆ Q A ˆ R ˆ Q A − ˆ R ˆ Q A ˆ Q A ˆ R ˆ Q A − ˆ Q A ˆ R ˆ Q A ˆ R ˆ Q A + ˆ Q A ˆ R ˆ Q A ˆ Q A ˆ R ˆ Q A o = T r ˆ R ˆ Q A ˆ R ˆ Q A − T r ˆ R ˆ Q A ˆ Q A ˆ R ˆ Q A − T r ˆ Q A ˆ R ˆ Q A ˆ R ˆ Q A + T r ˆ Q A ˆ R ˆ Q A ˆ Q A ˆ R ˆ Q A = T r ˆ R ˆ Q A ˆ R ˆ Q A − T r ˆ R ˆ Q A ˆ R ˆ Q A − T r ˆ Q A ˆ R ˆ Q A ˆ R + T r ˆ Q A ˆ R ˆ Q A ˆ R = 0 . (35) By using (29), we can expand the first and the second summand s of (33) as f ollows: k V k 2 F + k V H k 2 F = T r V H V + T r V H H V H = T r V H V + T r VV H = T r VV H + T r VV H = 2 T r VV H . (36) Equation ( 36) can be expre ssed in terms of the p rojection matrices of th e signal an d the no ise sub spaces and th e data covariance, in a similar way as for the third and fourth summand s of (33), as follows: 2 T r VV H = 2 T r ˆ Q A ˆ R ˆ Q ⊥ A ˆ Q A ˆ R ˆ Q ⊥ A H = 2 T r ˆ Q A ˆ R I M − ˆ Q A h ˆ Q A ˆ R I M − ˆ Q A i H = 2 T r ˆ Q A ˆ R − ˆ Q A ˆ R ˆ Q A ˆ Q A ˆ R − ˆ Q A ˆ R ˆ Q A H = 2 T r n ˆ Q A ˆ R ˆ R ˆ Q A − ˆ Q A ˆ R ˆ Q A ˆ R − ˆ Q A ˆ R ˆ Q A ˆ R ˆ Q A + ˆ Q A ˆ R ˆ Q A ˆ Q A ˆ R o = 2 n T r ˆ Q A ˆ R ˆ R ˆ Q A − T r ˆ Q A ˆ R ˆ Q A ˆ R − T r ˆ Q A ˆ R ˆ Q A ˆ R ˆ Q A + T r ˆ Q A ˆ R ˆ Q A ˆ Q A ˆ R o = 2 n T r ˆ Q A ˆ Q A ˆ R ˆ R − T r ˆ Q A ˆ R ˆ Q A ˆ R − T r ˆ Q A ˆ R ˆ Q A ˆ R + T r ˆ Q A ˆ R ˆ Q A ˆ R o = 2 n T r ˆ Q A ˆ Q A ˆ R ˆ R − T r ˆ Q A ˆ R ˆ Q A ˆ R o (37) From (33), (3 4), (35), (36) and (37), we ob tain the first summand of (3 2), a s follows: µ 2 E k V + V H k 2 F = 2 µ 2 E n T r ˆ Q A ˆ Q A ˆ R ˆ R − T r ˆ Q A ˆ R ˆ Q A ˆ R o (38) 9 In orde r to finish the expansion of the expression s inside braces of the seco nd member of (3 2), now we deal with its second summand , in which we make use of the cyclic pro perty [135] of the tra c e and the idem potence [ 1] [135] of ˆ Q A . T r h ˆ R − R V + V H i = n T r ˆ R − R ˆ Q A ˆ R ˆ Q ⊥ A + ˆ Q A ˆ R ˆ Q ⊥ A H = T r n ˆ R − R h ˆ Q A ˆ R I M − ˆ Q A + ˆ Q A ˆ R I M − ˆ Q A H = T r n ˆ R − R h ˆ Q A ˆ R − ˆ Q A ˆ R ˆ Q A + ˆ Q A ˆ R − ˆ Q A ˆ R ˆ Q A H = T r n ˆ R − R h ˆ Q A ˆ R − ˆ Q A ˆ R ˆ Q A + ˆ R ˆ Q A − ˆ Q A ˆ R ˆ Q A io = T r n ˆ R ˆ Q A ˆ R + ˆ R ˆ R ˆ Q A − 2 ˆ R ˆ Q A ˆ R ˆ Q A − R ˆ Q A ˆ R − R ˆ R ˆ Q A + 2 R ˆ Q A ˆ R ˆ Q A o = T r ˆ R ˆ Q A ˆ R + T r ˆ R ˆ R ˆ Q A − 2 T r ˆ R ˆ Q A ˆ R ˆ Q A − T r R ˆ Q A ˆ R − T r R ˆ R ˆ Q A + 2 T r R ˆ Q A ˆ R ˆ Q A = T r ˆ Q A ˆ R ˆ R + T r ˆ Q A ˆ R ˆ R − 2 T r ˆ Q A ˆ R ˆ Q A ˆ R − T r R ˆ Q A ˆ R − T r ˆ Q A R ˆ R + 2 T r ˆ Q A R ˆ Q A ˆ R = 2 T r ˆ Q A ˆ R ˆ R − 2 T r ˆ Q A ˆ R ˆ Q A ˆ R − T r R ˆ Q A ˆ R − T r ˆ Q A R ˆ R + 2 T r ˆ Q A R ˆ Q A ˆ R = 2 T r ˆ Q A ˆ Q A ˆ R ˆ R − 2 T r ˆ Q A ˆ R ˆ Q A ˆ R − T r R ˆ Q A ˆ Q A ˆ R − T r ˆ Q A ˆ Q A R ˆ R + 2 T r ˆ Q A R ˆ Q A ˆ R (39) By using (39), we can straigh tforwardly write the second summand o f the second member of (3 2) in terms of the projection matrices of the signal an d the no ise su b spaces an d the data covariance matr ix as f ollows: − 2 µ E n T r h ˆ R − R V + V H io = − 2 µ E n 2 T r ˆ Q A ˆ Q A ˆ R ˆ R − 2 T r ˆ Q A ˆ R ˆ Q A ˆ R − T r R ˆ Q A ˆ Q A ˆ R − T r ˆ Q A ˆ Q A R ˆ R + 2 T r ˆ Q A R ˆ Q A ˆ R o = − 4 µ E n T r ˆ Q A ˆ Q A ˆ R ˆ R − T r ˆ Q A ˆ R ˆ Q A ˆ R o − 2 µ n − T r E h R ˆ Q A ˆ Q A ˆ R i − T r E h ˆ Q A ˆ Q A R ˆ R i +2 T r E h ˆ Q A R ˆ Q A ˆ R io = − 4 µ E n T r ˆ Q A ˆ Q A ˆ R ˆ R − T r ˆ Q A ˆ R ˆ Q A ˆ R o − 2 µ n − T r R ˆ Q A ˆ Q A E h ˆ R i − T r ˆ Q A ˆ Q A R E h ˆ R i +2 T r ˆ Q A R ˆ Q A E h ˆ R io (40) Now , by u sing (38) and (40), an d assuming th at E h ˆ R i is an unbiased estimate o f ˆ R , i. e., E h ˆ R i = R , we can rewrite (3 2) as follows: MSE ˆ R ( n +1) n =1 − MSE ˆ R = µ 2 E k V + V H k 2 F − 2 µ E n T r h ˆ R − R V + V H io = 2 µ 2 E n T r ˆ Q A ˆ Q A ˆ R ˆ R − T r ˆ Q A ˆ R ˆ Q A ˆ R o − 4 µ E n T r ˆ Q A ˆ Q A ˆ R ˆ R − T r ˆ Q A ˆ R ˆ Q A ˆ R o − 2 µ n − T r R ˆ Q A ˆ Q A R − T r ˆ Q A ˆ Q A RR +2 T r ˆ Q A R ˆ Q A R o = 2 µ 2 E n T r ˆ Q A ˆ Q A ˆ R ˆ R − T r ˆ Q A ˆ R ˆ Q A ˆ R o − 4 µ E n T r ˆ Q A ˆ Q A ˆ R ˆ R − T r ˆ Q A ˆ R ˆ Q A ˆ R o − 2 µ n − 2 T r R ˆ Q A ˆ Q A R + 2 T r ˆ Q A R ˆ Q A R o = 2 µ 2 E n T r ˆ Q A ˆ Q A ˆ R ˆ R − T r ˆ Q A ˆ R ˆ Q A ˆ R o − 4 µ E n T r ˆ Q A ˆ Q A ˆ R ˆ R − T r ˆ Q A ˆ R ˆ Q A ˆ R o − 4 µ n T r ˆ Q A ˆ Q A RR − T r ˆ Q A R ˆ Q A R o = 2 µ 2 − 4 µ E n T r ˆ Q A ˆ Q A ˆ R ˆ R − T r ˆ Q A ˆ R ˆ Q A ˆ R o − 4 µ n T r ˆ Q A ˆ Q A RR − T r ˆ Q A R ˆ Q A R o (41) Next, we will discuss equation (41). For this purpo se, we assume that the estimate of the pro jection matrix o f the signal subspace ˆ Q A [1], the true R [134] and the data cov arian ce matrices ˆ R [13 4] a r e Hermitian. For the next steps we will make use of the following Th eorem which is proved in [137]: Theorem 1 : For two Her m itian matrices A and B of the same order, T r ( AB ) 2 k ≤ T r A 2 k B 2 k , (42) where k is in integer . By rep lacing A with ˆ Q A and B with ˆ R in (42) and also considerin g k = 1 , we ha ve T r ˆ Q A ˆ R 2 ≤ T r ˆ Q 2 A ˆ R 2 ∴ T r ˆ Q A ˆ R ˆ Q A ˆ R ≤ T r ˆ Q A ˆ Q A ˆ R ˆ R ⇒ T r ˆ Q A ˆ Q A ˆ R ˆ R − T r ˆ Q A ˆ R ˆ Q A ˆ R ≥ 0 (43) Similarly , makin g A = ˆ Q A and B = R fo r k = 1 , we obtain T r ˆ Q A R 2 ≤ T r ˆ Q 2 A R 2 ∴ T r ˆ Q A R ˆ Q A R ≤ T r ˆ Q A ˆ Q A RR ⇒ T r ˆ Q A ˆ Q A RR − T r ˆ Q A R ˆ Q A R ≥ 0 (44) Next, we an alyze the behavior of the expressions − 4 µ and 2 µ 2 − 4 µ based o n th e reliability factor µ ∈ [0 1] , as d efined in (12). In orde r to illustrate the case bein g studied , we assum e that both expressions are co ntinuous functions as dep icted in Fig. 7. It can be seen in it that in the rang e [0 1 ] both 10 0 0.2 0.4 0.6 0.8 1 −4 −3.5 −3 −2.5 −2 −1.5 −1 −0.5 0 X: 1 Y: −2 µ f ( µ ) X: 1 Y: −4 X: 0 Y: 0 (2 µ 2 − 4 µ ) − 4 µ Fig. 7. Beha vior of 2 µ 2 − 4 µ and − 4 µ for µ ∈ [0 1] expressions assum e values f( µ ) ≤ 0 , i.e. : F or µ ∈ [0 1 ] : 2 µ 2 − 4 µ ≤ 0 − 4 µ ≤ 0 (45) Now , we can consider the trac e s which for m the subtraction in (43) as d ifferent rand om variables y ( ω ) and x ( ω ) , i.e.: T r ˆ Q A ˆ Q A ˆ R ˆ R = y ( ω ) T r ˆ Q A ˆ R ˆ Q A ˆ R = x ( ω ) ) , ∀ ω ∈ Ω . (46) In addition , we can sup pose th at there is a ran dom variable z ( ω ) always greater th an zero, i.e., z ( ω ) ≥ 0 , so that z ( ω ) = y ( ω ) − x ( ω ) ≥ 0 , ∀ ω ∈ Ω (47) T aking the expectation o f (4 7) an d ap plying its properties of linearity and m onotonicity [136], [140], we obtain E [ z ( ω )] = E [ y ( ω ) − x ( ω )] ≥ 0 , (48) which, by ma king use of (4 6), r e sults in E [ z ( ω )] = E [ y ( ω ) − x ( ω )] = E n T r ˆ Q A ˆ Q A ˆ R ˆ R − T r ˆ Q A ˆ R ˆ Q A ˆ R o ≥ 0 (49) Next, we can combine th e inequalities (45) with (4 9) to compute the seco nd member of (41), for µ ∈ [0 1] . For its first summand , we combin e ( 45) and ( 49), as f ollows: ( E n T r ˆ Q A ˆ Q A ˆ R ˆ R − T r ˆ Q A ˆ R ˆ Q A ˆ R o ≥ 0 2 µ 2 − 4 µ ≤ 0 , µ ∈ [0 1] , (50) to obta in in a straightforward way 2 µ 2 − 4 µ E n T r ˆ Q A ˆ Q A ˆ R ˆ R − T r ˆ Q A ˆ R ˆ Q A ˆ R o ≤ 0 (51) Similarly , we can com p ute its second member, by comb ining (45) and (44), as described by ( T r ˆ Q A ˆ Q A RR − T r ˆ Q A ˆ R ˆ Q A ˆ R ≥ 0 − 4 µ ≤ 0 , µ ∈ [0 1] , (52) to obta in also stra ightforwardly the expression giv en by − 4 µ n T r ˆ Q A ˆ Q A RR − T r ˆ Q A R ˆ Q A R o ≤ 0 (53) By com bining the inequalities (5 1) and (53) with ( 41), we have MSE ˆ R ( n +1) n =1 − MSE ˆ R = 2 µ 2 − 4 µ E n T r ˆ Q A ˆ Q A ˆ R ˆ R − T r ˆ Q A ˆ R ˆ Q A ˆ R o | {z } ≤ 0 − 4 µ n T r ˆ Q A ˆ Q A RR − T r ˆ Q A R ˆ Q A R o | {z } ≤ 0 (54) ∴ MSE ˆ R ( n +1) n =1 − MSE ˆ R ≤ 0 (55) which is the desired result. R E F E R E N C E S [1] H. L. V an Trees, Detection, Estimation, and Modulation, P art IV , Optimum Array Proc essing , John Wil ey &Sons, 2002. [2] R. S chmidt, ”Mult iple emitter locatio n and signal paramete r estima- tion” IEEE T rans on A ntenna s and Pr opagati on , vol.34, No.3, Mar 1986, pp 276-280. [3] A. J. Barabel l, “Improving the resolution performance of eigenst ructure-based direction-findin g algorithms, ” in Proc. ICASSP , Boston, MA, Apr . 1983, pp. 336–339. [4] R. Roy and T . Kailath, ”Estimation of signal parameters via rotational in va riance techniqu es”, IEE E T rans. Acoust., Speech ., Signal Pr ocess- ing , vol. 37, July 1989, pp 984-995. [5] L. L . Scharf and D. W . T ufts, “Rank reduction for m odelin g s tationary signals, ” IEEE T ransacti ons on Acoustics, Speech and Signal Pr ocess- ing , vol. AS S P -35, pp. 350-355, March 1987. [6] A. M. Haimo vich and Y . Bar-Ne ss, “ An eigenanal ysis interfe rence cance ler , ” IEEE T rans. on Signal Proc essing , vol. 39, pp. 76-84, Jan. 1991. [7] D. A. Pados and S. N. Batal ama ”Joint space-ti me auxiliary vector fil- tering for DS/CDMA systems with antenna arrays” IEEE T ransacti ons on Communications , vol. 47, no. 9, pp. 1406 - 1415, 1999. [8] J. S. Goldstein , I. S. Reed and L . L . Scharf ”A multistage represent ation of the W iener filter based on orthogonal projec tions” IEEE T ransac- tions on Information Theory , vol. 44, no. 7, 1998. [9] Y . Hua, M. Nikpour and P . Stoica, ”Optimal reduced rank estimation and filtering, ” IEEE Transa ctions on Signal Processing, pp. 457-469, V ol. 49, No. 3, March 2001. [10] M. L. Honig and J. S. Goldstein, “ Adapti ve reduced -rank interference suppression based on the multistage Wi ener filter , ” IE EE T ransacti ons on Communications , vol. 50, no. 6, June 2002. [11] E. L . Santos and M. D. Zolto wski, “On Low Rank MVDR Beamform- ing using the Conjugat e Gradient Algorithm”, Proc . IEEE Internationa l Confer ence on Acoustics, Speec h and Signal P r ocessing , 2004. [12] Q. Haoli and S.N. Batala ma, “Data record-ba sed criteria for the select ion of an auxilia ry vector estimator of the MMSE/MVDR filter”, IEEE T ransact ions on Communications , vol. 51, no. 10, Oct. 2003, pp. 1700 - 1708. [13] R. C. de Lamare and R. Sampaio-Neto, “Reduced -Rank Adapti ve Filteri ng Based on Joint Iterati ve Optimizat ion of Adapti ve Filte rs”, IEEE Signal Proce ssing Letter s , V ol. 14, no. 12, December 2007. [14] Z. Xu and M.K. Tsatsanis, “Blind adapti ve algorithms for minimum v ariance CDMA recei vers, ” IEEE T rans. Communications , vol. 49, No. 1, January 2001. [15] R. C. de Lamare and R. Sampaio-Neto, “Low-Compl exity V ariable Step-Siz e Mechanisms for Stochastic Gradient Algorithms in Minimum V arianc e CDMA Recei vers”, IEEE T rans. Signal P r ocessing , vol. 54, pp. 2302 - 2317, June 2006. [16] C. Xu, G. Feng and K. S. Kwak, “ A Modified Constrained Constant Modulus Approac h to Blind Adaptiv e Multiuser Detection, ” IE EE T rans. Communicati ons , vol . 49, No. 9, 2001. [17] Z. Xu and P . Liu, “Code-Constra ined Blind Detect ion of CDMA Signals in Multipat h Channels, ” IEEE Sig. Pr oc. Letters , vol. 9, No. 12, December 2002. [18] R. C. de L amare and R. Sampaio Neto, ”Blind Adapti ve Code- Constrai ned Constant Modulus Algorithms for CDMA Interference Suppression in Multipa th Channels”, IEEE Communications Letters , vol 9. no. 4, April, 2005. [19] L. Landau, R. C. de Lamare and M. Haardt, “Robust adapti ve beam- forming algorithms using the constrained constant modulus criteri on, ” IET Signal Processing, vol.8, no.5, pp.447-457, July 2014. 11 [20] R. C. de Lamare, “ Adapti ve Reduced-Rank LCMV Beamforming Al- gorithms Based on Joint Iterati ve Optimisation of Filters”, Electr onics Letter s , vol. 44, no. 9, 2008. [21] R. C. de Lamare and R. Sampaio-Ne to, “ Adapti ve Reduced -Rank Processing Based on Joint and Iterati ve Interpolati on, Decimatio n and Filteri ng”, IEEE T ransactions on Signal Pro cessing , vol . 57, no. 7, July 2009, pp. 2503 - 2514. [22] R. C. de Lamare and Raimundo Sampaio-Neto, “Reduced-r ank Inter- ference S uppression for DS-CDMA based on Interpo lated FIR Filters”, IEEE Communicati ons Letters , vol. 9, no. 3, March 2005. [23] R. C. de Lamare and R. Sampaio-Ne to, “ Adapti ve Reduced -Rank MMSE Filteri ng with Interpolated FIR Filters and Adapti ve Interpola- tors”, IEE E Signal Pro cessing Letters , vol. 12, no. 3, March, 2005. [24] R. C. de Lamare and R. Sampaio-Neto, “ Adapti ve Interferen ce Sup- pression for DS-CDMA Systems based on Interpolate d FIR Filters with Adapti ve Interpolators in Multipath Channels”, IEEE T rans. V ehicular T echnol ogy , V ol. 56, no. 6, September 2007. [25] R. C. de Lamare, “ Adapti ve Reduced-Rank LCMV Beamforming Al- gorithms Based on Joint Iterati ve Optimisation of Filters, ” Electronic s Letters, 2008. [26] R. C. de Lamare and R. Sampaio-Neto, “Reduce d-rank adapti ve filterin g based on joint iterati ve optimiza tion of adapti ve filters”, IEEE Signal P r ocess. Lett. , vol. 14, no. 12, pp. 980-983, Dec. 2007. [27] R. C. de Lamare, M. Haardt, and R. Sampaio-Neto, “Blind Adapti ve Constrai ned Reduced-R ank Parameter Estimation based on Const ant Modulus Design for CDMA Interference Suppression”, IEEE T ransac- tions on Signal P r ocessing , J une 2008. [28] M. Y ukawa, R. C. de Lamare and R. Sampaio-Neto, “Efficie nt Acoustic Echo Can cellation Wit h Reduced-R ank Adapti ve Filteri ng Based on Select ive Decimation and Adapti ve Interpo lation, ” IEEE Transacti ons on Audio, Speech, and Language Processing, vol.16, no. 4, pp. 696- 710, May 2008. [29] R. C. de Lamare and R. Sampaio-Ne to, “Reduc ed-rank space-t ime adapti ve interfere nce suppression with joint itera tiv e least squares algorit hms for spread-spectrum systems, ” IEEE Tr ans. V ehi. T echnol. , vol. 59, no. 3, pp. 1217-1228, Mar . 2010. [30] R. C. de L amare and R. S ampaio-Neto, “ Adapti ve reduced-rank equal- izati on algorithms based on alterna ting optimizatio n design techni ques for MIMO systems, ” IEE E T rans. V ehi. T echnol . , vol . 60, no. 6, pp. 2482-2494, Jul. 2011. [31] R. C. de Lamare, L. W ang, and R. Fa, “ Adapti ve reduced-ra nk LCMV beamforming algorit hms based on joint iterati ve optimizat ion of filters: Design and analysis, ” Signal Processing, vol. 90, no. 2, pp. 640-652, Feb . 2010. [32] R. Fa, R. C. de Lamare, and L. W ang, “Reduce d-Rank ST AP Schemes for Airborne Radar Based on Switched Joint Interpola tion, Decimati on and Filter ing Algori thm, ” IEEE T ransac tions on Signal Proce ssing , vol.58, no.8, Aug. 2010, pp.4182-4194. [33] L. W ang and R. C. de L amare, ”Low-Comple xity Adapti ve Step Size Constrai ned Constant Modulus SG Algori thms for Blind Adaptiv e Beamforming” , Signal Pr ocessing , vol. 89, no. 12, December 2009, pp. 2503-2513. [34] L. W ang and R. C. de Lamare, “ Adapti ve Constrained Constant Modu- lus Algorithm Based on Auxiliary V ector Filtering for Beamforming, ” IEEE Transacti ons on Signal Processing, vo l. 58, no. 10, pp. 5408- 5413, O ct. 2010. [35] L. W ang, R. C. de Lamare, M. Y ukaw a, ”Adapti ve Red uced-Rank Constrai ned Constant Modulus Algorithms Based on Joint Iterati ve Optimiza tion of Filters for Beamforming, ” IEEE T ransactions on Signal P r ocessing , vol.58, no.6, June 2010, pp.2983-2997. [36] L. W ang, R. C. de Lamare and M. Y ukawa , “ Adapti ve reduced- rank constrained constant modulus algorithms based on joint iterati ve optimiza tion of filters for beamforming”, IEEE Transacti ons on S ignal Processing, vol.58, no. 6, pp. 2983-2997, June 2010. [37] L. W ang and R. C. de Lamare, “ Adapti ve constrai ned constant modulus algorit hm based on auxiliary vect or filtering for beamforming”, IEEE Tra nsactions on Signal Processing, vol. 58, no. 10, pp. 5408-5413, October 2010. [38] R. Fa and R. C. de Lamare, “Reduc ed-Rank ST AP Algori thms us- ing Joint Iterat ive Optimization of Filters, ” IEEE Tra nsactions on Aerospace and Elec tronic Systems, vol.47, no.3, pp.1668-16 84, July 2011. [39] Z. Y ang, R. C. de Lamare and X. Li, “L1-Re gularized ST AP Algo- rithms With a Generali zed S idelo be Canceler Archite cture for Airborne Radar , ” IEE E Tra nsactions on Signal Processing, vol.60, no.2, pp.674- 686, Feb . 2012. [40] Z. Y ang, R. C. de L amare and X. L i, “Sparsity- aware space–t ime adap- ti ve processing algorit hms with L 1-norm re gularisation for airborne radar”, IE T signal processing, vol. 6, no. 5, pp. 413-423, 2012. [41] Neto, F .G.A.; Nascimento, V .H. ; Zakharov , Y .V .; de Lamare, R.C., ”Adapti ve re-weighting homotopy for sparse beamforming, ” in Signal Processing Conference (EUSIPCO), 2014 Proceedings of the 22nd European , vol., no., pp.1287-1291, 1-5 Sept. 2014 [42] Almeida Neto, F .G.; de Lamare, R.C.; Nascimen to, V .H.; Zakharov , Y .V .,“ Adapti ve rewe ighting homotopy algorit hms applied to beamform- ing, ” IEEE Tra nsactions on Aerospace and Electronic Systems, vol.51, no.3, pp.1902-1915, July 2015. [43] L. W ang, R. C. de L amare and M. Haardt, “Directi on finding algorit hms based on joint itera tiv e subspace opti mization, ” IEE E Transac tions on Aerospace and Electronic Systems, vol . 50, no.4, pp.2541-2553, October 2014. [44] S. D. Somasundaram, N. H. Parsons, P . Li and R. C. de Lamare, “Reduced-di m ension robust capon beamforming using Krylov- subspace techniques, ” IEEE Transacti ons on Aerospace and Electronic Systems, vol.51, no.1, pp.270-289, January 2015. [45] S. Xu and R.C de Lamare, , Distributed conjugate gradient strate gies for distributed estimation over sensor networks , Sensor Signal Process- ing for Defense SSPD, September 2012. [46] S. Xu, R. C. de Lamare, H. V . Poor , “Distribut ed Estimation Over Sensor Networ ks Based on Distributed Conjuga te Gradient Strate gies”, IET Signal Processing, 2016 (to appear). [47] S. Xu, R. C. de Lamare and H. V . Poor , Distrib uted Compr essed Estimation Based on Compressiv e Sensing , IEEE Signal Processing lette rs, vol. 22, no. 9, September 2014. [48] S. Xu, R. C. de Lamare and H. V . Poor , “Distribut ed reduced-ra nk estimati on based on joint iterati ve optimiza tion in sensor netwo rks, ” in Proceedings of the 22nd European Signal Processing Confere nce (EUSIPCO), pp.2360-2364, 1-5, Sept. 2014 [49] S. Xu, R. C. de Lamare and H. V . Poor, “ Adapti ve link selection strate gies for distrib uted estimation in diffusion wireless networks, ” in Proc. IE EE Internatio nal Conference onAcoustics, Speech and Signal Processing (ICASSP), , vol., no., pp.5402-5405, 26-31 May 2013. [50] S. Xu, R. C. de L amare and H . V . Poor, “Dynamic topology adaptati on for distributed estimation in smart grids, ” in Computati onal Adv ances in Multi-Se nsor Adapti ve Processing (CAMSAP), 2013 IEEE 5th Interna tional W orkshop on , vol., no., pp.420-423, 15-18 Dec. 2013. [51] S. X u, R. C. de Lamare and H. V . Poor , “ Adaptiv e L ink Selection Al- gorithms for Distribute d Es timation”, EURASIP Journal on Adv ances in Signal Processing, 2015. [52] N. Song, R. C. de Lamare, M. Haardt, and M. W olf, “ Adaptiv e Wi dely Linear Reduced-Ra nk Interference Suppression based on the Multi- Stage Wie ner Filter , ” IEEE Transact ions on Signal Processing, vol. 60, no. 8, 2012. [53] N. S ong, W . U. Alokozai , R. C. de Lamare and M. Haardt, “ Adapti ve W idely L inear Reduce d-Rank Beamforming Based on Joint Iterati ve Optimiza tion, ” IEE E Signal Processing L ette rs, vol.21, no.3, pp. 265- 269, March 2014. [54] R.C. de Lamare, R. Sampa io-Neto and M. Haardt, ”Bli nd Adapti ve Constrai ned Constant-Modul us Reduced-Rank Interf erence Suppres- sion Algorithms Based on Interpola tion and Switche d Dec imation, ” IEEE T rans. on Signal Pr ocessing , vol.59, no.2, pp.681-695, Feb . 2011. [55] Y . Cai, R. C. de Lamare, “ Adapti ve Linear Minimum BER Reduced - Rank Interfe rence Suppression Algorithms Based on Joint and Iterati ve Optimiza tion of Filters, ” IEEE Communicatio ns Letters, vol.17, no.4, pp.633-636, April 2013. [56] R. C. de Lamare and R. Sampaio-Net o, “Sparsity-A war e Adapti ve Algorith m s Based on A lternating Optimizati on and Shrinkage , ” IE EE Signal Processing Letters, vol.21, no.2, pp.225,229, Feb . 2014. [57] J. Steinw andt, R. C. de Lamare and M. Haardt, ”Beamspace direction finding based on the conjugate gradien t and the auxilia ry vector filteri ng algorit hms”, Signal Processing, vol. 93, no. 4, April 2013, pp. 641-651. [58] L. W ang, R. C. de L amare and M. Haardt, ”Directi on finding algorit hms based on join t iterati ve subspace optimizati on, ” IEEE T ransactions on Aero space and Electr onic Systems , vol. 50, no. 4, pp. 2541-2553, October 2014. [59] L. Qiu, Y . Cai, R. C. de Lamare and M. Zhao, ”Reduced- Rank DOA Estimation Algorithms Based on Alt ernating Low-Ra nk Decomposi- tion, ” IEEE Signal Pr ocessing Letters , vol. 23, no. 5, pp. 565-569, May 2016. [60] J. Thomas, L. Scharf, and D. Tu fts, “The probabilit y of a subspace swap in the SVD, ” IEEE Tra ns. Signal Proce ss . , vol. 43, no. 3, pp. 730–736, Mar . 1995. [61] B. D. Carlson, “Cov arianc e matrix estimat ion errors and dia gonal loading in adapti ve arrays, ” IEE E Trans. Aerosp. Electron. Syst., vol. 24, no. 4, pp. 397–401, Jul. 1988. [62] Y . Chen, A. Wiese l, Y . C. E ldar , and A. O. Hero, “Shrinkage algorithms for MMSE cov arianc e estimatio n, ” IE EE Trans. Signal Process., vol. 58, no. 10, pp. 5016–5028, Oct. 2010. 12 [63] H. Ruan and R. C. de Lamare, “Robust Adaptiv e Beamforming Using a Low-Compl exity Shrinkage -Based Mismatch E stimatio n Algorithm, ” IEEE Signal Processing L ette rs, vol. 21, no. 1, pp. 60-64, Jan. 2014. [64] H. Ruan and R. C. de Lamare, “Robust Adapti ve Beamforming Based on L o w-Rank and Cross-Correlati on T echniq ues, ” IEE E Transa ctions on S ignal Processing, vol. 64, no. 15, pp. 3919-3932, Aug.1, 1 2016. [65] S. U. Pillai and B. H. Known , “Forwa rd/backwar d spatia l s moothing techni ques for coherent signal identifica tion, ” IEEE Trans. Acoust., Speech, S ignal Process., vol. 37, no. 1, pp. 8–15, Jan. 1989. [66] J. E. Eva ns, J. R. Johnson, and D. F . Sun, Applic ation of Advanc ed Signal Processing T echnique s to Angle of Arriv al Estimation in A TC Navi gation and Surve illance Systems. Lexin gton, MA, USA: MIT Lincoln L ab ., June 1982. [67] X. Mestre and M. A. Lagunas, “Modified subspace algorit hms for DOA estimati on with large arrays, ” IEEE Tra ns. Signal Process., vol. 56, no. 2, pp. 598–614, Feb . 2008. [68] A. B. Gershman and J. F . B ¨ ohme, “Improved DOA esti mation via pseudorand om resampling of spatial spectrum, ” IEEE Signal Process. Lett., vol. 4, no. 2, pp. 54–57, Feb . 1997. [69] V . V asylyshyn, “Removi ng the outliers in root-MUSIC via pseudonoise resampling and con vent ional beamformer , ” Signal Process., vol. 93, no. 12, pp. 3423–3429, Dec. 2013. [70] C. Qian, L. Huang, and H. C. So, “Improved unitary root-MUSIC for DOA estimation based on pseudo-noise resampling, ” IEEE Signal Process. L ett., vol. 21, no. 2, pp. 140–144, Feb. 2014. [71] R. C. de Lamare, “Massiv e MIMO Systems: Signal Processing Chal- lenges and Future Trends”, Radio Science Bulletin, December 2013. [72] W . Zhang, H. Ren, C. Pan, M. Chen, R. C. de Lamare, B. Du and J. Dai, “Large-Scale Antenna Systems W ith UL/DL Hardware Mismatch: Achie va ble Rates Analysis and Calibrat ion”, IEEE Trans. Commun., vol.63, no.4, pp. 1216-1229, April 2015. [73] M. Costa, ”Writing on dirty paper , ” IE EE T rans. Inform. Theory , vol. 29, no. 3, pp. 439-441, May 1983. [74] R. C. de Lamare and A. Alcaim, ”Strate gies to improv e the performance of very low bit rate speech coders and applicati on to a 1.2 kb/s codec” IEE Proceedings- V ision, image and signal processing, vol. 152, no. 1, February , 2005. [75] P . Clarke and R. C. de Lamare, ”Joint Transmit Dive rsity Optimizatio n and Relay Selection for Multi-Relay Cooperati ve MIMO Systems Using Discrete Stochastic Algorithms, ” IEEE Communicat ions Letter s , vol.15, no.10, pp.1035-1037, October 2011. [76] P . Clark e and R. C. de Lamare, ”Transmit Div ersity and Rel ay Se- lecti on Algorithms for Multire lay Cooperati ve MIMO Systems” IEEE T ransact ions on V ehicular T echnolo gy , v ol.61, no. 3, pp. 1084-1098, October 2011. [77] Y . Cai, R. C. de Lamare, and R. Fa, “Switched Interlea ving T echni ques with Limited Feedback for Interference Mitigati on in DS-CDMA Sys- tems, ” IEEE Transac tions on Communications, vol.59, no.7, pp.1946- 1956, J uly 2011. [78] Y . Cai, R. C. de Lamare, D. Le Ruyet, “Transmit Processing T echni ques Based on Switched Interl eaving and Limited F eedback for Interference Mitiga tion in Multiant enna MC-CDMA Systems, ” IEEE Transa ctions on V ehicular T echnology , vol.60, no.4, pp.1559-1570, May 2011. [79] T . W ang, R. C. de Lamare, and P . D. Mit chell, “Lo w-Complexity Set-Membershi p Channel Estimation for Cooperati ve Wirel ess Sensor Networ ks, ” IEEE Tran sactions on V ehicul ar T echnology , vol.60, no.6, pp.2594-2607, July 2011. [80] T . W ang, R. C. de L amare and A. Schmeink, ”Joint linear recei ver design and power allocation using alternating optimizati on algorit hms for wireless sensor netwo rks, ” IE EE T rans. on V ehi. T ech. , vol. 61, pp. 4129-4141, 2012. [81] R. C. de Lamare, “Joint itera tiv e power alloc ation and linea r inter- ference suppression algorithms for cooperati ve DS-CDMA networks”, IET Communicat ions, vol. 6, no. 13 , 2012, pp. 1930-1942. [82] T . Peng, R. C. de Lamare and A. Schmeink, “ Adapti ve Distrib uted Space-T ime Coding Based on Adjustable Code Matrice s for Cooper - ati ve MIMO Relaying Systems”, IEEE T ransact ions on Communica- tions , vol. 61, no. 7, July 2013. [83] T . Peng and R. C. de Lamare, “ Adapti ve Buffer -Aided Distri buted Space-T ime Coding for Cooperati ve W ireless Netwo rks, ” IE EE Trans- actio ns on Communicati ons, vol. 64, no. 5, pp. 1888-1900, May 2016. [84] J. Gu, R. C. de Lamare and M. Huemer , “Buf fer-Aided Physical-Laye r Networ k Codi ng with Optimal L inear Code Designs for Cooperati ve Networ ks, ” IEEE Tran sactions on Communications, 2018. [85] K. Zu, R. C. de Lamare, “Lo w-Complexity Lattice Reductio n-Aided Regu larized Block Diagonali zation for MU-MIMO Systems”, IEEE. Communicat ions Letters, V ol. 16, No. 6, June 2012, pp. 925-928. [86] K. Zu, R. C. de Lamare, “Lo w-Complexity Lattice Reductio n-Aided Regu larized Block Diagonali zation for MU-MIMO Systems”, IEEE. Communicat ions Letters, V ol. 16, No. 6, June 2012. [87] K. Zu, R. C. de Lamare and M. Haart, “Gene ralized design of lo w-complexit y block diag onalizatio n type precoding algorithms for multiuser MIMO systems”, IEEE Trans. Communicat ions, 2013. [88] M. T omlinson, ”Ne w automatic equaliser emplo ying modulo arith- metic, ” Electr onic L ette rs , vol. 7, Mar . 1971. [89] C. T . Healy and R. C. de Lamare, “Decoder -optimised progressi ve edge gro wth algorithms for the design of LDPC codes with lo w error floors”, IEEE Communicatio ns L ette rs , vol. 16, no. 6, June 2012, pp. 889-892. [90] A. G. D. Uchoa, C. T . Healy , R. C. de Lamare, R. D. Souza, “LDPC codes based on progressi ve edge growth techni ques for block fadin g channe ls”, Proc. 8th Internat ional Symposium on W irel ess Communi- cation Systems (ISWCS) , 2011, pp. 392-396. [91] A. G. D. Uchoa, C. T . Healy , R. C. de L amare, R. D. Souza, “Genera lised Quasi-Cycli c LDPC codes based on progre ssive edge gro wth techniqu es for block fading channels”, Pr oc. International Symposium W irel ess Communication Systems (ISWCS) , 2012, pp. 974- 978. [92] A. G. D. Uchoa, C. T . Healy , R. C. de L amare, R. D. Souza, “Design of LDPC Code s Based on Progressiv e Edge Growth T echnique s for Block Fading Channels” , IEEE Communications Letters , vol. 15, no. 11, November 2011, pp. 1221-1223. [93] H. Harashima and H. Miyakawa , ”Matched-t ransmission technique for channe ls with intersymbol interf erence, ” IEEE T rans. Commun. , vol. 20, Aug. 1972. [94] K. Zu, R. C. de L amare and M. Haardt, “Multi -branch tomli nson- harashima precoding for single-u ser MIMO systems, ” in Sm art Anten- nas (WSA), 2012 Internat ional ITG W orkshop on , vol . , no., pp.36-40, 7-8 March 2012. [95] K. Zu, R. C. de Lamare and M. Haardt, “Mul ti-Branch T omlinson- Harashima Precodin g Design for MU-MIMO Systems: Theory and Algorith m s, ” IEEE Transacti ons on Communications, vol.62, no.3, pp.939,951, March 2014. [96] L. Zhang, Y . Cai, R. C. de Lamare and M. Zhao, “Robust Multi- branch T omlinson–Harashi ma Precoding Design in Amplify- and- Forw ard MIMO Relay Systems, ” IEEE Transac tions on Communica- tions, vol.62, no.10, pp.3476,3490, Oct. 2014. [97] W . Zhang et al., “W idely Linear Precoding for Large-Sca le MIMO with IQI: Algorithms and Performance Analysis, ” IEEE Transact ions on W ireless Communications, vol. 16, no. 5, pp. 3298-3312, May 2017. [98] B. Hochwa ld, C. Peel and A. Swindle hurst, ”A vector -perturbatio n techni que for nea r capac ity multiante nna m ultiuse r communicati on - Part II: Perturbation , ” IEEE T rans. Commun. , vol. 53, no. 3, Mar . 2005. [99] C. B. Chae, S. Shim and R. W . Heath, ”Block diagonaliz ed vector perturba tion for multiuser MIMO systems, ” IEEE T rans. W ir eless Commun. , vol. 7, no. 11, pp. 4051 - 4057, Nov . 2008. [100] R. C. de Lamare, R. Sampaio-Net o, “ Adapti ve MBER decision feed- back multiuser recei vers in frequenc y select ive fadin g channels”, IEE E Communicat ions L ette rs , vol. 7, no. 2, Feb . 2003, pp. 73 - 75. [101] A. Rontogiannis, V . Kekato s, and K. Berberidis, ” A Square-Root Adap- ti ve V -BLAST Algorit hm for Fast T ime-V arying MIMO Channel s, ” IEEE Signal Proc essing Letters , V ol. 13, No. 5, pp. 265-268, May 2006. [102] R. C. de Lamare, R. Sampaio-Net o, A. Hjorungnes, “Joint iterati ve in- terfere nce cancellat ion and parameter estimation for CDMA systems”, IEEE Communicati ons Letters , vol. 11, no. 12, December 2007, pp. 916 - 918. [103] Y . Cai and R. C. de Lamare, ”Adapti ve Space-Ti m e Decision Feedbac k Detect ors with Multiple Feedba ck Cancella tion”, IE EE T ransact ions on V ehicul ar T echnolo gy , vol. 58, no. 8, October 2009, pp. 4129 - 4140. [104] J. W . Choi, A. C. Singer , J Lee, N. I. Cho, “Improv ed linear soft- input soft-outp ut detecti on via s oft feed back successi ve interfere nce cance llation, ” IE EE T rans. Commun. , vol.58, no.3, pp.986-996, March 2010. [105] R. C. de Lamare and R. Sampaio-Ne to, “Blind adapti ve MIMO recei vers for space-time block-cod ed DS-CDMA systems in multipath channe ls using the constant modulus criter ion, ” IE EE Transact ions on Communicat ions, vol.58, no.1, pp.21-27, January 2010. [106] R. Fa, R. C. de Lamare, “Multi -Branch Successiv e Interferenc e Cancel- latio n for MIMO Spatial Multipl exing Systems”, IET Commun ications , vol. 5, no. 4, pp. 484 - 494, March 2011. [107] R.C. de Lamare and R. Sampaio-Neto, “ Adapti ve reduced- rank equal- izati on algorithms based on alterna ting optimizatio n design techni ques for MIMO systems, ” IEEE Trans. V eh. T echnol., vol. 60, no. 6, pp. 2482-2494, July 2011. [108] P . Li, R. C. de L amare and R. Fa, “Multipl e Feedba ck Successi ve Interfer ence Cancell ation Detectio n for Multiuser MIMO Systems, ” IEEE T ransactions on W ireless Communication s , vol. 10, no. 8, pp. 2434 - 2439, August 2011. [109] R.C. de Lamare, R. Sampaio- Neto, “Minimum mean-squared error iterat iv e successi ve parallel arbitrated decisi on feedback detectors for 13 DS-CDMA systems, ” IEEE Trans. Commun., vol. 56, no. 5, May 2008, pp. 778-789. [110] R.C. de Lamare, R. Sampaio- Neto, “Minimum mean-squared error iterat iv e successi ve parallel arbitrated decisi on feedback detectors for DS-CDMA systems, ” IEEE Trans. Commun., vol. 56, no. 5, May 2008. [111] R.C. de Lamare and R. Sampaio-Neto, “ Adapti ve reduced- rank equal- izati on algorithms based on alterna ting optimizatio n design techni ques for MIMO systems, ” IEEE Trans. V eh. T echnol., vol. 60, no. 6, pp. 2482-2494, July 2011. [112] P . L i, R. C. de Lamare and J. Liu, “ Adapti ve Decision Feedback Detect ion with Parall el Interfere nce Cancel lation and Constella tion Constrai nts for Mult iuser MIMO systems”, IET Communica tions, vol.7, 2012, pp. 538-547. [113] J. Liu, R. C. de L amare, “Low-Laten cy Reweig hted Belief Propagation Decoding for L DPC Codes, ” IE EE Communication s Lette rs, vol. 16, no. 10, pp. 1660-1663, October 2012. [114] C. T . Healy and R. C. de Lamare, “Design of LDPC Codes Based on Multipath EMD Strategi es for Progressi ve Edge Growth, ” IEEE Tra nsactions on Communication s, vol. 64, no. 8, pp. 3208-3219, Aug. 2016. [115] P . Li and R. C. de Lamare, Distribute d Iterati ve Detection Wi th Reduce d Messag e Passing for N etworked MIMO Cellu lar Syste m s, IEEE Transac tions on V ehicular T echnolo gy , vol.63, no.6, pp. 2947- 2954, J uly 2014. [116] A. G. D. Uchoa, C. T . Healy and R. C. de Lamare, “Iterati ve Detect ion and Decodi ng Algorithms For MIMO Systems in Block- Fadi ng Channels Using LDPC Codes, ” IEEE Tr ansactions on V ehicu lar T echno logy , 2015. [117] R. C. de Lamare, ”Adapti ve and Iterati ve Multi-Branch MMSE De- cision Feedback Detection Algorithms for Multi-Ant enna S ystems”, IEEE T rans. W irel ess Commun. , vol. 14, no. 10, October 2013. [118] A. G. D. Uchoa, C. T . Healy and R. C. de Lamare, “Iterati ve Detect ion and Decoding Algorithms for MIMO Systems in Block- Fadi ng Channels Using LDPC Codes, ” IEEE Tr ansactions on V ehicu lar T echno logy , vol. 65, no. 4, pp. 2735-2741, April 2016. [119] Y . Cai, R. C. de Lamare, B. Champagne , B. Qin and M. Zhao, ”Adap- ti ve Reduced-Ra nk Recei ve Processing Based on Minimum Symbol- Error-Rat e Criterion for Large-Scal e Multiple-Ante nna Systems, ” in IEEE Transa ctions on Communication s, vol. 63, no. 11, pp. 4185-4201, Nov . 2015. [120] Z. Shao, R. C. de Lamare and L. T . N. Landau, “Iterati ve Detecti on and Decoding for Large-Scale Multiple-Ant enna Systems with 1-Bit ADCs, ” IEEE Wi reless Communications Letters, 2018. [121] M. Shaghag hi and S. A. V orobyo v , ”Subspace lea kage analysis and improv ed DOA estimation with small sample size”, IEEE Trans. Signal Process., vol. 63, no.12, pp 3251-3265, Jun.2015. [122] P . Stoica and A. Nehorai, “Performance study of conditional and uncondit ional direction-of -arriv al estimati on, ” IEEE Tra ns. Acoust., Speech, S ignal Process., vol. 38, no. 10, pp. 1783–1795, Oct. 1990. [123] B. A. Johnson, Y . I. Abramovich, and X. Mestre, “MUSIC, G-MUSIC, and maximum-lik elihood performance breakd own, ” IEEE Trans. Signal Process., vol. 56, no. 8, pp. 3944–3958, Aug. 2008. [124] S. F . B. Pinto, R. C. de Lamare, T wo-Step Knowled ge-aided Iterat iv e ESPRIT Algorithm, T wenty First ITG W orkshop on Smart Antennas, 15-17 March 2017, Berlin, Germany . [125] W . L. Melvin and J. R. Guerci, “Kno wledge-aided signal processing: a ne w paradigm for radar and other adv anced sensors, ” IEEE Tran sac- tions on Aerospace and Electronic Systems, vol. 42, no. 3, pp. 983–996, July 2006. [126] W . L. Melvin and G. A. Showman, “ An approach to knowledge -aided cov arianc e estimation, ” IEEE Transac tions on Aerospace and Electroni c Systems, vol. 42, no. 3, pp.1021–1042, July 2006. [127] J. S. Bergin, C. M. T eixeira , P . M. T echau , and J . R. Guerci , “Improved clutt er mitigation performance using kno wledge-aided space-time adap- ti ve processing, ” IEEE Tran sactions on Aerospace and E lectro nic Systems, vol. 42, no. 3, pp. 997–1009, July 2006. [128] J. Steinwandt , R. C. de Lamare and M. Haardt, ”Knowl edge-aided direct ion finding based on Unitary ESPRIT , ” 2011 Conferen ce Record of the Forty Fifth Asilomar Conference on Signals, Systems and Computers (ASIL OMAR), Pacific Grove, CA, 2011, pp. 613-617. [129] P . Stoica, J. Li, X. Zhu, and J. R. Guerc i, ”On using a priori kno wledge in space-time adapti ve processing , ” IEEE Transacti ons on Signal Processing, vol. 56, no. 6, pp. 2598-2602, June 2008. [130] G. Bouleux, P . Stoica, and R. Boyer , ”An optimal prior knowled ge- based DOA estimatio n metho d, ” in 17th European S ignal Processing Conferen ce (E USIPCO), Aug. 2009, pp. 869-873. [131] P . Stoica, J. Li, X. Zhu, and J. R. Guerc i, ”On using a priori kno wledge in spacetime adapti ve processing, ” IEEE Transac tions on Signal Processing, vol. 56, no. 6, pp. 2598–2602, June 2008. [132] S. F . B. Pinto, R. C. de L amare, “Multi- Step Kno wledge-Aide d Iter - ati ve ESPRIT for D irection Finding”, submitted to 22nd Internat ional Conferen ce on Digital Signal Processing, 23-25 August 2017 (DSP 2017), L ondon, United Kingdom. [133] S. F . B. Pinto and R. C. de Lamare, “Multi-Step Knowledge -Aided Iter- ati ve ES P RIT: D esign and Analysis, ” IEEE Transacti ons on Aerospace and Electronic Systems, 2018. [134] Simon Haykin, Adapti ve Filter Theory , fourth edition, 2003. [135] F .A. Graybi ll, Matric es with Appli cations in Statisti cs, W adsworth Publishing Company , Inc., Second Edition, 1983. [136] Alan F . Karr , P robability , Springer -V erlag NY , Second Edition, 1993. [137] Da-W ei Chang, ”A Matrix Trace Inequality for Products of Hermitian Matrice s”, Journa l of Mathematica l Analysis and Applica tions 237, pp.721-725, 1999. [138] H.Semira, H.Belkac emi, S. Marcos, ”High-resolutio n source loc aliza- tion algorithm based on the conjugate gradien t”, EURASIP Journal on Adv ances in Signal Processing, 2007(2)(2007)1–9 . [139] R.Grover , D. A.Pados, M.J. Medle y , ”Subspace direction finding with an auxili ary-vector basis”, IEEE Transact ions on Signal Processing, 55 (2) (2007) pp.758–763. [140] J.P .A. Almeida, J.M.P . Forte s, W .A. Finamore, Probabil ity , Random V ariabl es and Stochastic Processes, PUC-RIO/Intercien cia, 2008. [141] P .Stoica and A.B.Gershman, ”Maximum-like lihood DOA estimation by data-supp orted grid search” , IE EE Signal Processing Letters, vol. 6, no. 10, pp. 273- 275, Oct 1999. [142] P .Stoica and Arye Nehorai, ”MUSIC, maximum Likelih ood, and Cramer -Rao Bound”, IEEE Tra nsactions on Acoustics, Speec h and Signal Processing, vol. 37,no. 5, pp. 720- 741, May 1989. [143] J.C.Liberti Jr, Theodo re S. rappap ort, ”Smart antennas for Wi reless Communicat ions: IS-95 and Third Generation CDMA Applications” , Chapte r 9, pp 253-284, Prentice Hall, 1999. [144] S.V .Schell , W .A. Gardner , ”High Resoluti on Direction Finding” , Chap- ter 17, K. Bose and C.R. Rao, pp 755-817,1993. [145] J.Rissanen, ”Modeling by the Shortest Data Descript ion”, Automatica, V ol.14, pp 465-471,1978. [146] F . Li, R. J . V accaro, ”Analysis of Min-Norm and MUSIC with arbitra ry array geometry”, IE EE T ransact ions on Aer ospace and Electr onic Systems , vol.26, no. 6, pp 976-985, 1990. [147] M. H aardt, ”Effic ient one-, two-, and multidimensiona l high-resoluti on array signal processing”, Ph.D. dissertat ion, Munich Uni versity of T echno logy , Shake r V erlag, 1996.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment