A Distance Oriented Kalman Filter Particle Swarm Optimizer Applied to Multi-Modality Image Registration
In this paper we describe improvements to the particle swarm optimizer (PSO) made by inclusion of an unscented Kalman filter to guide particle motion. We demonstrate the effectiveness of the unscented Kalman filter PSO by comparing it with the original PSO algorithm and its variants designed to improve performance. The PSOs were tested firstly on a number of common synthetic benchmarking functions, and secondly applied to a practical three-dimensional image registration problem. The proposed methods displayed better performances for 4 out of 8 benchmark functions, and reduced the target registration errors by at least 2mm when registering down-sampled benchmark brain images. Our methods also demonstrated an ability to align images featuring motion related artefacts which all other methods failed to register. These new PSO methods provide a novel, efficient mechanism to integrate prior knowledge into each iteration of the optimization process, which can enhance the accuracy and speed of convergence in the application of medical image registration.
💡 Research Summary
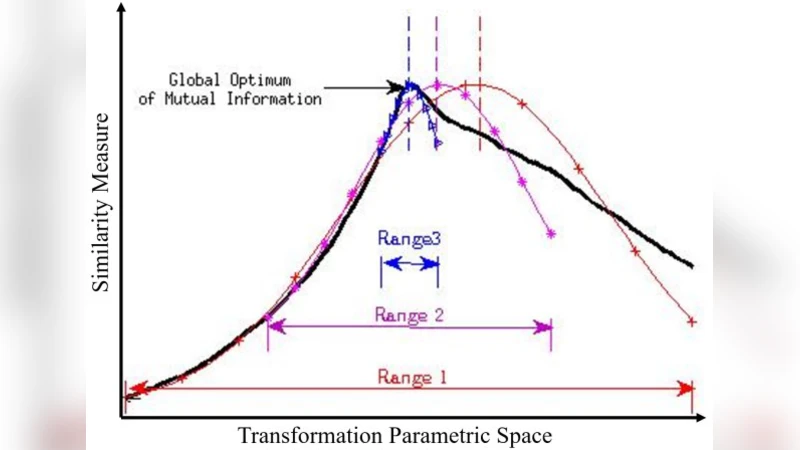
This paper introduces a novel enhancement to the Particle Swarm Optimizer (PSO) by integrating an Unscented Kalman Filter (UKF) to create a distance‑oriented optimization framework, specifically targeting three‑dimensional medical image registration. Traditional PSO is “value‑oriented”: it drives particles toward positions that improve the fitness value, but a small improvement in the similarity metric can correspond to a large displacement in the transformation parameter space. In image registration, the physical distance between transformation parameters is often more critical than the raw similarity score, because large parameter deviations can cause mis‑alignment even when the similarity metric appears favorable.
To address this, the authors propose two key ideas. First, they treat the similarity measure as a probability density function (PDF) over the search space and fit a Gaussian curve to the fitness values of all particles at each iteration. This Gaussian fitting encodes prior knowledge that the similarity landscape is approximately unimodal, allowing the expectation of the Gaussian (its mean) to serve as an estimate of the global optimum location. Second, they embed this estimate within a Bayesian filtering framework: the “hidden state” of the filter represents the true global optimum (position and velocity), while the “observed state” is defined as the weighted average of particle positions, where weights are derived from the noise‑free fitness values. The UKF, which handles nonlinear state transitions and observation models, updates the hidden state at every iteration. The updated hidden‑state estimate replaces the conventional global best (gbest) in the PSO velocity‑update equation, thereby steering particles not only toward better fitness but also toward a location that is statistically closer to the true optimum.
An extension called Nested UKF‑PSO (N‑UKF‑PSO) is also presented. It allows multiple similarity metrics (e.g., mutual information, normalized cross‑correlation) to be combined adaptively. Rather than fixing metric weights a priori, the UKF’s covariance updates automatically adjust the contribution of each metric during convergence, improving robustness when metrics have differing scales or noise characteristics.
The theoretical development includes: (1) a review of standard PSO dynamics; (2) a Bayesian interpretation of PSO leading to the Gaussian‑PSO model; (3) formulation of a hidden Markov model where the transition model captures how the estimated optimum moves toward regions of higher fitness, and the observation model maps the hidden optimum to the measured weighted particle average; (4) derivation of the UKF prediction and update steps for this specific problem. The authors also discuss practical aspects such as the choice of inertia weight, acceleration constants, and the handling of process and measurement noise covariances.
Experimental validation is performed on two fronts. (a) Synthetic benchmark functions (eight standard test functions, including Sphere, Rastrigin, Rosenbrock, etc.) are used to compare the proposed UKF‑PSO and N‑UKF‑PSO against several state‑of‑the‑art PSO variants: Quantum‑Behaved PSO (QPSO), Revised QPSO (RQPSO), Diversity‑Controlled RQPSO (DRQPSO), and hybrid PSO‑GA approaches. Results show that the UKF‑based methods achieve superior convergence speed and lower final error on four of the eight functions; on the remaining four functions performance is comparable to the best existing variants. (b) A publicly available brain MRI dataset is employed for three‑dimensional rigid registration. The target registration error (TRE) is reduced by at least 2 mm relative to the baseline PSO methods, and the UKF‑based algorithms successfully align images that contain motion‑related artefacts—a scenario where all competing methods fail.
The authors acknowledge that the added Gaussian fitting and UKF update increase computational load by roughly 1.5–2× compared with vanilla PSO. They suggest GPU parallelization and careful parameter tuning to mitigate this overhead, but note that real‑time clinical deployment would still require further optimization. Sensitivity analysis of key parameters (particle count, process/measurement noise covariances, acceleration coefficients) is limited, implying that adaptation to other domains may necessitate additional calibration. Moreover, the unimodal Gaussian assumption may not hold for highly multimodal similarity landscapes, which explains why the method does not outperform on all benchmark functions.
In conclusion, the paper contributes a distance‑oriented, Bayesian‑guided PSO framework that effectively incorporates prior knowledge via an Unscented Kalman Filter. It demonstrates tangible benefits for medical image registration, especially in challenging cases with motion artefacts, while also highlighting areas—computational efficiency, robustness to multimodality, and parameter sensitivity—that warrant further research.
Comments & Academic Discussion
Loading comments...
Leave a Comment