Event Correlation and Forecasting over Multivariate Streaming Sensor Data
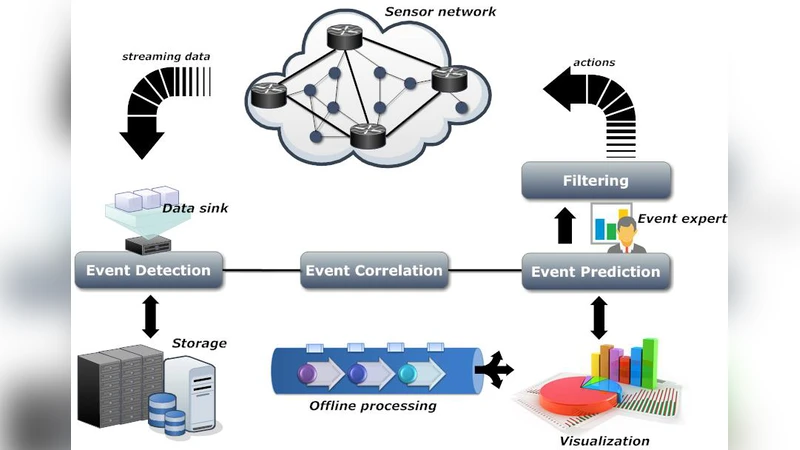
Event management in sensor networks is a multidisciplinary field involving several steps across the processing chain. In this paper, we discuss the major steps that should be performed in real- or near real-time event handling including event detection, correlation, prediction and filtering. First, we discuss existing univariate and multivariate change detection schemes for the online event detection over sensor data. Next, we propose an online event correlation scheme that intends to unveil the internal dynamics that govern the operation of a system and are responsible for the generation of various types of events. We show that representation of event dependencies can be accommodated within a probabilistic temporal knowledge representation framework that allows the formulation of rules. We also address the important issue of identifying outdated dependencies among events by setting up a time-dependent framework for filtering the extracted rules over time. The proposed theory is applied on the maritime domain and is validated through extensive experimentation with real sensor streams originating from large-scale sensor networks deployed in ships.
💡 Research Summary
The paper presents a comprehensive framework for real‑time event management in multivariate sensor streams, covering detection, correlation, prediction, and adaptive filtering of outdated dependencies. The authors begin by formalizing event detection as a transformation from a continuous context vector (CV) of synchronized sensor readings into a binary event vector (EV) that flags abrupt changes. Both univariate change‑detection techniques—Cumulative Sum (CUSUM) and Shewhart control charts—and a multivariate autoregressive (AR‑fit) approach are evaluated. While CUSUM offers high sensitivity to small shifts, Shewhart provides robustness against noise; the AR‑fit model leverages past CVs to predict future values and flags deviations exceeding a threshold as events.
For event correlation, the paper departs from traditional single‑step Markov assumptions and introduces a variable‑order Markov model (VOMM) based on the concept of partial matching. VOMM dynamically determines the order k of the Markov chain, allowing the model to condition the probability of the next event on a variable‑length history of preceding events. This is crucial for multivariate sensor data where multiple events can co‑occur in the same time step (e.g., simultaneous spikes in temperature, humidity, and smoke detectors during a fire). The VOMM is trained online using sliding windows, updating transition probabilities by maximum‑likelihood estimation.
To give the learned dependencies a logical and probabilistic interpretation, the authors embed them into a Probabilistic Temporal Logic Programming (PTLP) framework. Each rule takes the form “E₁ ∧→ E₂ @
Comments & Academic Discussion
Loading comments...
Leave a Comment