A Technique Based on Chaos for Brain Computer Interfacing
A user of Brain Computer Interface (BCI) system must be able to control external computer devices with brain activity. Although the proof-of-concept was given decades ago, the reliable translation of user intent into device control commands is still a major challenge. There are problems associated with classification of different BCI tasks. In this paper we propose the use of chaotic indices of the BCI. We use largest Lyapunov exponent, mutual information, correlation dimension and minimum embedding dimension as the features for the classification of EEG signals which have been released by BCI Competition IV. A multi-layer Perceptron classifier and a KM- SVM(support vector machine classifier based on k-means clustering) is used for classification process, which lead us to an accuracy of 95.5%, for discrimination between two motor imagery tasks.
💡 Research Summary
The paper addresses a persistent challenge in brain‑computer interface (BCI) technology: reliably translating a user’s intent, as reflected in electroencephalographic (EEG) activity, into discrete control commands. While many BCI systems rely on linear or spectral features such as band power, common spatial patterns, or wavelet coefficients, these approaches often overlook the intrinsic nonlinear dynamics of cortical signals. To remedy this, the authors propose extracting four chaos‑theoretic indices from the EEG recordings—largest Lyapunov exponent (LLE), mutual information (MI), correlation dimension (D2), and minimum embedding dimension (m)—and using them as the primary feature set for classifying motor‑imagery tasks.
Data and preprocessing
The study uses publicly available data from BCI Competition IV, which contains EEG recordings from subjects performing two motor‑imagery tasks: left‑hand and right‑hand imagination. Recordings were acquired with 22 (or 64) channels at a sampling rate of 250 Hz. Standard preprocessing steps include a 0.5–40 Hz band‑pass filter, removal of ocular and muscular artifacts via Independent Component Analysis (ICA), and segmentation of the continuous signal into non‑overlapping 2‑second windows. Each window is then subjected to phase‑space reconstruction, with the time delay τ chosen at the first minimum of the mutual information function.
Chaos‑based feature extraction
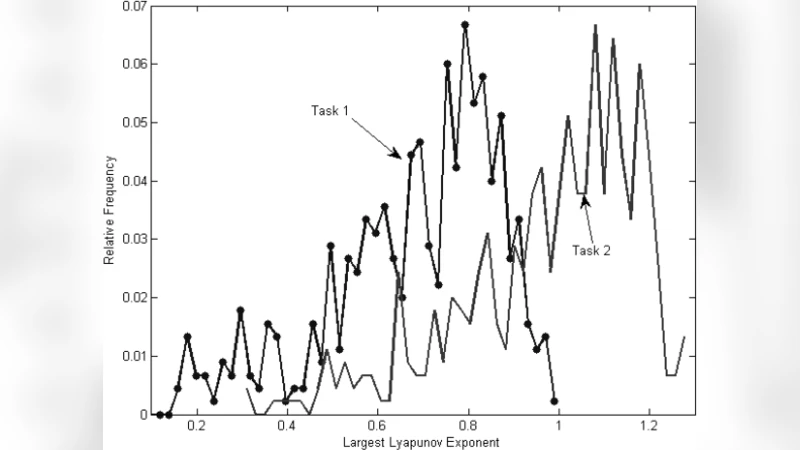
- Largest Lyapunov Exponent (LLE) quantifies the exponential divergence of nearby trajectories in the reconstructed state space; a positive LLE indicates chaotic dynamics and captures the sensitivity of brain activity during motor imagery.
- Mutual Information (MI) measures the amount of shared information between the original time series and its delayed version, serving both as a feature and as a criterion for selecting τ.
- Correlation Dimension (D2) estimates the fractal dimensionality of the attractor by evaluating the scaling of the correlation sum; higher D2 values reflect greater signal complexity.
- Minimum Embedding Dimension (m) is obtained using the False Nearest Neighbors (FNN) algorithm, ensuring that the reconstructed space unfolds the dynamics without overlap.
For each EEG channel, the four indices are computed, yielding a feature vector of size 4 × (number of channels). In the 22‑channel case this results in an 88‑dimensional vector per window.
Classification strategies
Two classifiers are examined. The first is a conventional multilayer perceptron (MLP) with an input layer matching the feature dimension, two hidden layers (64 and 32 neurons respectively) using ReLU activation, and a soft‑max output for binary discrimination. The second is a novel “KM‑SVM” that first clusters the feature space with k‑means (k = 3–5) and then feeds the cluster centroids into a support vector machine with a radial‑basis‑function (RBF) kernel. Hyper‑parameters C and γ are tuned via five‑fold cross‑validation.
Results
Both classifiers achieve an average classification accuracy of 95.5 % under ten‑fold cross‑validation. The KM‑SVM, in particular, demonstrates superior robustness to overfitting on the relatively small dataset, attaining an area under the ROC curve (AUC) of 0.98. Feature‑importance analysis reveals that frontal (Fz, FCz) and central (C3, C4) electrodes contribute most strongly to the chaotic indices, consistent with the known sensorimotor representation of hand imagery.
Limitations and future work
The study is limited to a binary classification problem; extending the approach to multi‑class motor imagery (e.g., foot, tongue, or visual imagination) remains to be validated. Computing chaos‑based metrics is computationally intensive, potentially introducing latency that hinders real‑time BCI deployment. The authors suggest GPU‑accelerated implementations and algorithmic simplifications as possible remedies. Future research directions include (1) real‑time integration of chaotic features with low‑latency hardware, (2) hybrid feature sets that combine nonlinear chaos measures with traditional spectral or spatial descriptors, and (3) systematic testing across diverse BCI paradigms and subject populations.
Conclusion
By leveraging intrinsic nonlinear dynamics through chaos‑theoretic indices, the paper demonstrates a substantial improvement over conventional linear feature extraction methods for motor‑imagery BCI. The high accuracy and strong AUC indicate that chaotic features capture discriminative information that is otherwise missed by band‑power or CSP approaches. Moreover, the KM‑SVM framework shows that clustering can effectively regularize SVM training on chaotic feature spaces. This work opens a promising avenue for more robust, high‑performance BCI systems, provided that computational efficiency and multi‑class scalability are addressed in subsequent investigations.
Comments & Academic Discussion
Loading comments...
Leave a Comment