On Tightly Bounding the Dubins Traveling Salesmans Optimum
The Dubins Traveling Salesman Problem (DTSP) has generated significant interest over the last decade due to its occurrence in several civil and military surveillance applications. Currently, there is no algorithm that can find an optimal solution to the problem. In addition, relaxing the motion constraints and solving the resulting Euclidean TSP (ETSP) provides the only lower bound available for the problem. However, in many problem instances, the lower bound computed by solving the ETSP is far below the cost of the feasible solutions obtained by some well-known algorithms for the DTSP. This article addresses this fundamental issue and presents the first systematic procedure for developing tight lower bounds for the DTSP.
💡 Research Summary
The paper addresses a fundamental gap in the study of the Dubins Traveling Salesman Problem (DTSP), namely the lack of tight lower bounds against which the quality of heuristic and approximation solutions can be measured. The DTSP extends the classic Euclidean TSP (ETSP) by imposing a minimum turning radius ρ on the vehicle, making the problem NP‑hard and combining elements of optimal control with combinatorial optimization. Existing approaches obtain a lower bound simply by solving the relaxed ETSP, but this bound is often far below the cost of feasible DTSP tours generated by state‑of‑the‑art heuristics, leaving practitioners without a reliable benchmark.
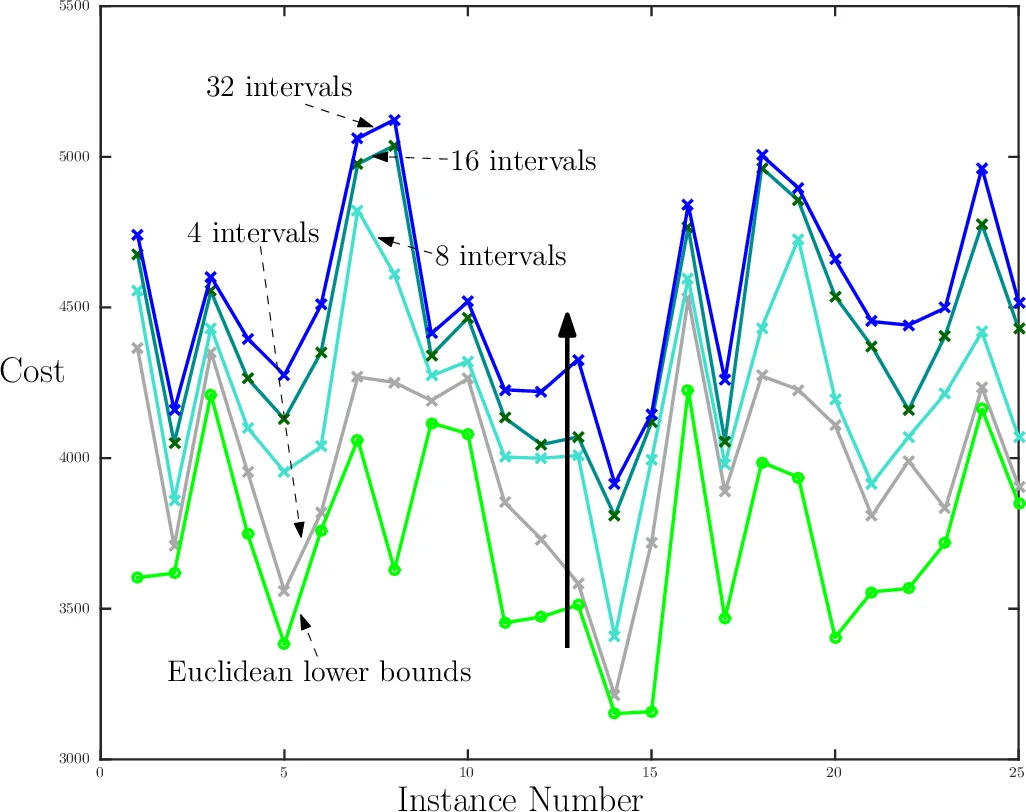
To remedy this, the authors propose a systematic lower‑bounding framework that reformulates the DTSP as a “one‑in‑a‑set” Traveling Salesman Problem. The key idea is to discretize the admissible heading angles at each target into a collection of closed intervals I_i = {
Comments & Academic Discussion
Loading comments...
Leave a Comment