Drift-Free Indoor Navigation Using Simultaneous Localization and Mapping of the Ambient Heterogeneous Magnetic Field
In the absence of external reference position information (e.g. GNSS) SLAM has proven to be an effective method for indoor navigation. The positioning drift can be reduced with regular loop-closures and global relaxation as the backend, thus achieving a good balance between exploration and exploitation. Although vision-based systems like laser scanners are typically deployed for SLAM, these sensors are heavy, energy inefficient, and expensive, making them unattractive for wearables or smartphone applications. However, the concept of SLAM can be extended to non-optical systems such as magnetometers. Instead of matching features such as walls and furniture using some variation of the ICP algorithm, the local magnetic field can be matched to provide loop-closure and global trajectory updates in a Gaussian Process (GP) SLAM framework. With a MEMS-based inertial measurement unit providing a continuous trajectory, and the matching of locally distinct magnetic field maps, experimental results in this paper show that a drift-free navigation solution in an indoor environment with millimetre-level accuracy can be achieved. The GP-SLAM approach presented can be formulated as a maximum a posteriori estimation problem and it can naturally perform loop-detection, feature-to-feature distance minimization, global trajectory optimization, and magnetic field map estimation simultaneously. Spatially continuous features (i.e. smooth magnetic field signatures) are used instead of discrete feature correspondences (e.g. point-to-point) as in conventional vision-based SLAM. These position updates from the ambient magnetic field also provide enough information for calibrating the accelerometer and gyroscope bias in-use. The only restriction for this method is the need for magnetic disturbances (which is typically not an issue indoors); however, no assumptions are required for the general motion of the sensor.
💡 Research Summary
The paper presents a novel simultaneous localization and mapping (SLAM) framework that achieves drift‑free indoor navigation by exploiting the ambient heterogeneous magnetic field together with a low‑cost MEMS inertial measurement unit (IMU). Traditional SLAM systems rely on vision or lidar sensors, which are heavy, power‑hungry, and expensive, making them unsuitable for wearable or smartphone platforms. The authors propose to replace discrete visual features with continuous magnetic field signatures, modeling the magnetic field as a Gaussian Process (GP) and integrating this model directly into the SLAM backend as a maximum‑a‑posteriori (MAP) estimator.
The system architecture consists of two main sensing streams: (1) a high‑frequency strap‑down IMU that provides orientation, velocity, and position updates through numerical integration, and (2) a tri‑axial magnetometer that measures the local magnetic vector. The IMU state propagation follows a standard quaternion‑based kinematic model, while sensor biases are modeled as random walks. The magnetometer measurement equation incorporates the rotation from the body frame to a global mapping frame and assumes Gaussian measurement noise.
The core contribution is the formulation of the magnetic field map as a GP prior. The authors first describe a squared‑exponential kernel, then extend it to curl‑free and divergence‑free kernels that respect Maxwell’s equations, thereby capturing the physical correlation among the three magnetic components. The GP hyper‑parameters—signal variance σ_f and length‑scale ℓ—are not manually tuned; instead, they are estimated from the data during optimization. The MAP problem combines the IMU odometry residuals, the magnetic measurement residuals, and the GP prior into a single nonlinear least‑squares cost function, which is solved using a Levenberg‑Marquardt optimizer. This joint optimization simultaneously refines the robot trajectory and the magnetic field map, providing loop‑closure detection, global trajectory correction, and bias calibration for the IMU.
Simulation studies explore the sensitivity of the system to the hyper‑parameters and odometry noise. Varying σ_f shows that too small a value renders the magnetic field indistinguishable from noise, while too large a value over‑weights noisy measurements; the best performance occurs around σ_f≈0.1. Length‑scale ℓ controls the spatial correlation radius: a small ℓ (≈0.1 m) yields higher accuracy but requires a good initial trajectory for convergence, whereas a large ℓ (≈0.4 m) smooths the map excessively and degrades precision. Odometry noise analysis reveals that low‑noise IMU data (≤0.5 mm) greatly enlarges the convergence basin, whereas high‑noise data (≥5 mm) can cause the optimizer to become trapped in local minima.
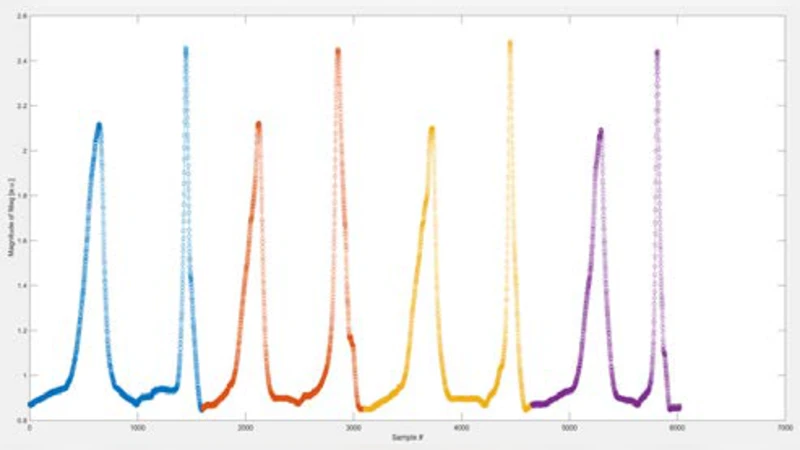
Real‑world experiments were conducted with an Xsens MT‑i 300 IMU and magnetometer in a typical office environment. The sensor was moved along a rectangular path four times, creating overlapping loops. The magnetic magnitude varied by up to 1.67 arbitrary units, providing sufficient distinctiveness for loop‑closure via auto‑correlation. After applying the GP‑SLAM algorithm, the positional error decreased from the centimeter range to the millimeter range after roughly 1800 optimization iterations. The authors note that the cost reduction per iteration is modest, reflecting the O(n³) computational complexity and O(n²) memory demand of dense GP regression, which limits real‑time applicability.
In summary, the paper demonstrates that continuous magnetic field signatures can serve as reliable, drift‑free features for indoor SLAM, achieving millimeter‑level accuracy without external beacons or visual cues. The approach also naturally calibrates IMU biases. Limitations include the necessity of sufficient magnetic disturbances, sensitivity to GP hyper‑parameters, and high computational load. Future work is suggested in the direction of sparse GP approximations, real‑time implementation, and multimodal sensor fusion (e.g., UWB, vision, and magnetic) to enhance robustness and scalability.
Comments & Academic Discussion
Loading comments...
Leave a Comment