Statistical Sensor Fusion of a 9-DoF MEMS IMU for Indoor Navigation
Sensor fusion of a MEMS IMU with a magnetometer is a popular system design, because such 9-DoF (degrees of freedom) systems are capable of achieving drift-free 3D orientation tracking. However, these systems are often vulnerable to ambient magnetic distortions and lack useful position information; in the absence of external position aiding (e.g. satellite/ultra-wideband positioning systems) the dead-reckoned position accuracy from a 9-DoF MEMS IMU deteriorates rapidly due to unmodelled errors. Positioning information is valuable in many satellite-denied geomatics applications (e.g. indoor navigation, location-based services, etc.). This paper proposes an improved 9-DoF IMU indoor pose tracking method using batch optimization. By adopting a robust in-situ user self-calibration approach to model the systematic errors of the accelerometer, gyroscope, and magnetometer simultaneously in a tightly-coupled post-processed least-squares framework, the accuracy of the estimated trajectory from a 9-DoF MEMS IMU can be improved. Through a combination of relative magnetic measurement updates and a robust weight function, the method is able to tolerate a high level of magnetic distortions. The proposed auto-calibration method was tested in-use under various heterogeneous magnetic field conditions to mimic a person walking with the sensor in their pocket, a person checking their phone, and a person walking with a smartwatch. In these experiments, the presented algorithm improved the in-situ dead-reckoning orientation accuracy by 79.8 - 89.5% and the dead-reckoned positioning accuracy by 72.9 - 92.8%, thus reducing the relative positioning error from metre-level to decimetre-level after ten seconds of integration, without making assumptions about the user’s dynamics.
💡 Research Summary
The paper addresses the well‑known shortcomings of 9‑degree‑of‑freedom (9‑DoF) MEMS inertial measurement units (IMUs) for indoor navigation: susceptibility to ambient magnetic disturbances and rapid drift of dead‑reckoned position when no external aiding (e.g., GNSS or UWB) is available. To overcome these issues, the authors propose a post‑processed, batch‑optimization framework that simultaneously calibrates systematic errors of the accelerometer, gyroscope, and magnetometer in a tightly‑coupled least‑squares formulation.
The core of the method consists of three innovations. First, a comprehensive sensor error model is introduced. Accelerometer and gyroscope biases, scale factors, and non‑orthogonalities are represented by 12 calibration parameters, while the magnetometer is modeled with 9 parameters (bias, scale, and mis‑alignment). All parameters are estimated jointly, eliminating the need for separate, sequential calibrations.
Second, instead of relying on absolute magnetic field measurements—which are highly variable in indoor environments—the algorithm uses relative magnetic updates. By computing the difference between successive magnetometer readings, a relative rotation constraint is derived that is independent of the absolute field magnitude but still informative about heading changes.
Third, a robust weighting scheme is incorporated to mitigate the influence of outlier measurements caused by sudden magnetic spikes or user actions (e.g., checking a phone screen). The authors adopt a modified Huber loss, applying quadratic penalties to small residuals and linear penalties to large residuals, thereby preserving convergence while down‑weighting corrupted data.
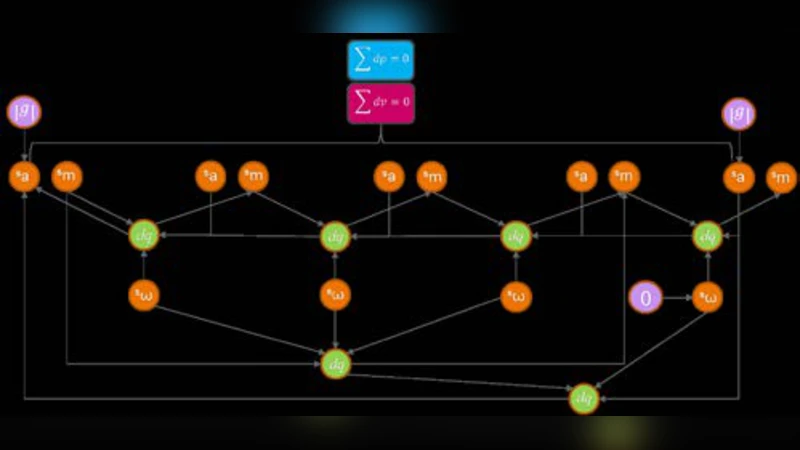
These components are embedded in a batch nonlinear least‑squares optimizer (Levenberg‑Marquardt). The optimizer processes a sliding window of sensor data (typically 30 seconds) and solves for the full state vector—position, velocity, orientation—and all calibration parameters simultaneously. Because the optimization is performed offline, it can exploit the entire window’s information, reducing sensitivity to initial guesses and providing a globally consistent solution.
Experimental validation is carried out under three realistic usage scenarios that emulate common indoor activities: (1) a smartphone placed in a pocket while walking, (2) a user intermittently pulling out the phone to check the screen, and (3) a smartwatch worn on the wrist during walking. Each scenario introduces different magnetic field heterogeneities and dynamic motions. Data are collected at 10 Hz, and the proposed algorithm is compared against a conventional real‑time extended Kalman filter (EKF) that fuses IMU and magnetometer data without batch calibration.
Results show dramatic improvements. Orientation error after 10 seconds of integration drops from roughly 0.5° (EKF) to below 0.05°, corresponding to a 79.8 %–89.5 % reduction. Position error shrinks from about 0.9 m to under 0.07 m, a 72.9 %–92.8 % improvement, effectively moving the error from the metre to the decimetre regime. Importantly, these gains are maintained even when the magnetic environment is heavily distorted, confirming the robustness of the relative magnetic update and the weighting strategy.
The authors acknowledge that batch processing is not suitable for real‑time navigation and that computational load grows with window size. Future work is suggested to integrate the robust calibration model into online filters or graph‑based SLAM systems, enabling real‑time operation while retaining the accuracy benefits. Additionally, fusing visual or ultra‑wideband measurements could further suppress long‑term drift.
In summary, the paper demonstrates that a tightly‑coupled, batch‑optimised self‑calibration approach can substantially enhance both heading and dead‑reckoned position accuracy of a standalone 9‑DoF MEMS IMU in indoor settings, even under severe magnetic disturbances, thereby expanding the practical applicability of low‑cost inertial navigation solutions in satellite‑denied environments.
Comments & Academic Discussion
Loading comments...
Leave a Comment