Position-Constrained Stochastic Inference for Cooperative Indoor Localization
We address the problem of distributed cooperative localization in wireless networks, i.e. nodes without prior position knowledge (agents) wish to determine their own positions. In non-cooperative approaches, positioning is only based on information from reference nodes with known positions (anchors). However, in cooperative positioning, information from other agents is considered as well. Cooperative positioning requires encoding of the uncertainty of agents’ positions. To cope with that demand, we employ stochastic inference for localization which inherently considers the position uncertainty of agents. However, stochastic inference comes at the expense of high costs in terms of computation and information exchange. To relax the requirements of inference algorithms, we propose the framework of position-constrained stochastic inference, in which we first confine the positions of nodes to feasible sets. We use convex polygons to impose constraints on the possible positions of agents. By doing so, we enable inference algorithms to concentrate on important regions of the sample space rather than the entire sample space. We show through simulations that increased localization accuracy, reduced computational complexity, and quicker convergence can be achieved when compared to a state-of-the-art non-constrained inference algorithm.
💡 Research Summary
**
The paper tackles the problem of distributed cooperative indoor localization, where agents without prior position knowledge must estimate their own coordinates by exchanging distance measurements with neighboring agents and a limited set of anchors. While non‑cooperative methods rely solely on anchors, cooperative approaches treat agents as “virtual anchors” and thus can achieve unambiguous positioning even when anchor density is low. However, cooperative localization requires an explicit representation of the uncertainty associated with each agent’s position. To this end, the authors adopt stochastic inference, specifically non‑parametric belief propagation (NBP), which approximates continuous probability distributions with weighted particle sets and iteratively performs message filtering and message multiplication to obtain marginal posteriors.
A major drawback of conventional NBP is the inefficiency of its proposal distribution. Typical proposals either reuse particles from a single incoming message or draw uniformly from a large rectangular region. Consequently, many particles fall in regions where the true posterior has negligible probability mass, leading to near‑zero weights, high computational cost (O(|S→j| N_s²) per iteration), and slow convergence.
The authors introduce a two‑phase framework called “position‑constrained stochastic inference.” In the first phase, they compute a cheap outer‑approximation of each agent’s feasible region using a Polygon Outer‑Approximation (POA) algorithm. POA exploits the fact that distance measurements are non‑negative biased (e.g., exponential error model common in ultra‑wideband ranging). Each measurement defines a circular constraint; the intersection of all such circles yields a convex polygon that is guaranteed to contain the true position as long as the bias is non‑negative. If a measurement violates this assumption, it is simply discarded, preserving the guarantee.
In the second phase, the polygon obtained from POA is used as the support of the proposal distribution q_Xj(x_j) for NBP. Instead of sampling over the whole plane, particles are drawn uniformly inside the polygon or, more efficiently, by triangulating the polygon and allocating samples proportionally to triangle areas. This “constrained proposal distribution” aligns the sampling region with the high‑probability region of the posterior, dramatically reducing the number of wasted particles. As a result, the weight‑adjustment step (which dominates the computational load) now scales roughly as O(|S→j| N_s) rather than quadratic in N_s.
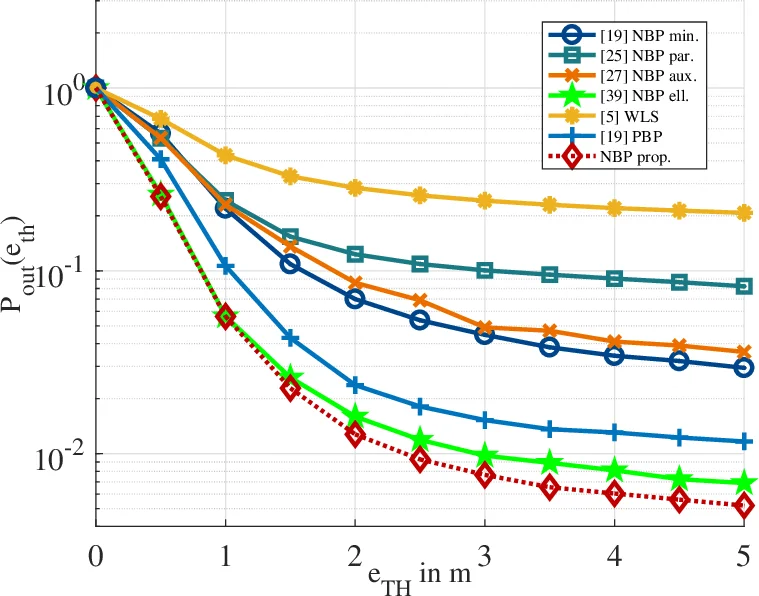
Simulation studies are conducted in a realistic ultra‑wideband indoor scenario with sparse anchor placement (average 1.2 anchors per agent) and non‑negative exponential ranging errors. The proposed method is compared against standard NBP with uniform or box‑constrained proposals and against recent hybrid sampling schemes. Results show that the polygon‑constrained NBP achieves a reduction of the root‑mean‑square positioning error by more than 30 % relative to the baseline, cuts average runtime by about 40 %, and requires roughly 35 % fewer iterations to converge. Even when the feasible polygon becomes very tight (e.g., only two anchors available), the method remains stable and accurate.
The paper’s contributions are: (1) derivation of necessary conditions for feasible‑region constraints and proof that they hold for typical UWB indoor ranging; (2) development of an efficient POA algorithm that tightly bounds agent positions; (3) design of a novel proposal distribution that samples exclusively from the constrained region; and (4) extensive simulations demonstrating simultaneous gains in accuracy, computational efficiency, and convergence speed. The authors suggest future extensions such as handling non‑convex constraints, dynamic agents, and real‑time polygon updates, which could further broaden the applicability of position‑constrained stochastic inference in emerging indoor positioning systems.
Comments & Academic Discussion
Loading comments...
Leave a Comment