Performance of Analog Nonlinear Filtering for Impulsive Noise Mitigation in OFDM-based PLC Systems
Asynchronous and cyclostationary impulsive noise can severely impact the bit-error-rate (BER) of OFDM-based powerline communication systems. In this paper, we analyze an adaptive nonlinear analog front end filter that mitigates various types of impul…
Authors: Reza Barazideh, Balasubramaniam Natarajan, Alexei V. Nikitin
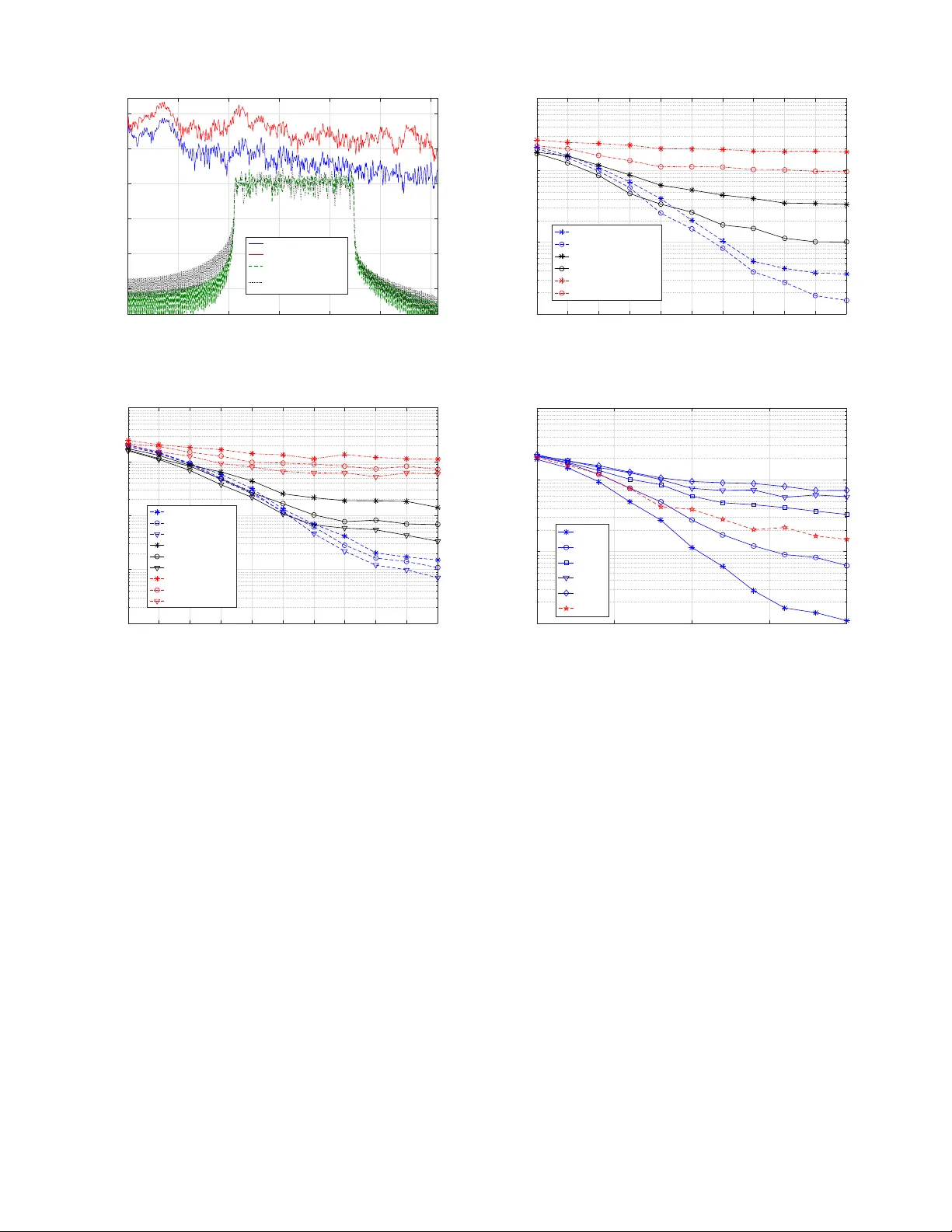
978-1-5386-2098-4/17/$31.00 c 2017 IEEE. Performance of Analog Nonlinear Filtering for Impulsi v e Noise Mitigation in OFDM-based PLC Systems Reza Barazideh † , Balasubramaniam Natarajan † , Alex ei V . Nikitin † , ∗ , Ruslan L. Davidchack ‡ † Department of Electrical and Computer Engineering, Kansas State Univ ersity , Manhattan, KS, USA. ∗ Nonlinear Corp., W ame go, KS 66547, USA. ‡ Dept. of Mathematics, U. of Leicester , Leicester, LE1 7RH, UK. Email: { rezabarazideh,bala } @ksu.edu, avn@nonlinearcorp.com, rld8@leicester .ac.uk Abstract —Asynchronous and cyclostationary impulsive noise can sever ely impact the bit-error -rate (BER) of OFDM-based powerline communication systems. In this paper , we analyze an adaptive nonlinear analog front end filter that mitigates various types of impulsive noise without detrimental effects such as self-interference and out-of-band power leakage caused by other nonlinear approaches like clipping and blanking. Our proposed Adaptive Nonlinear Differential Limiter (ANDL) is constructed from a linear analog filter by applying a feedback- based nonlinearity , controlled by a single resolution parameter . W e present a simple practical method to find the value of this resolution parameter that ensures the mitigation of impulsive without impacting the desired OFDM signal. Unlike many prior approaches for impulsive noise mitigation that assume a statistical noise model, ANDL is blind to the exact nature of the noise distribution, and is designed to be fully compatible with existing linear front end filters. W e demonstrate the potency of ANDL by simulating the OFDM-based narro wband PLC compliant with the IEEE standards. W e show that the proposed ANDL outperforms other approaches in reducing the BER in impulsive noise envir onments. Index T erms —Impulsi ve noise, analog nonlinear filter , adaptive nonlinear differential limiter (ANDL), orthogonal frequency- division multiplexing (OFDM), powerline communication (PLC). I . I N T RO D U C T I O N Smart Grid is a concept that enables wide-area monitoring, two-way communications, and fault detection in power grids, by exploiting multiple types of communications technologies, ranging from wireless to wireline [1]. Thanks to the ubiq- uitousness of powerline infrastructure, low deployment costs, and its wide frequency band, powerline communication (PLC) has become a choice for a variety of smart grid applica- tions [2]. In particular , there has been increasing demand in dev eloping narro wband PLC (NB-PLC) systems in the 3-500 kHz band, offering data rates up to 800 kbps [1], [3]. In order to achiev e such a data rates, multicarrier modulation techniques such as orthogonal frequency division multiplexing (OFDM) are preferred due to their robust performance in frequency-selecti ve channels [4]. Since the powerline infras- tructure is originally designed for power deliv ery and not for data communications [3], OFDM-based PLC solutions face many challenges such as noise, impedance mismatch- ing and attenuation. Powerline noise typically generated by electrical devices connected to the po werlines and coupled to the grid via conduction and radiation is a major issue in PLC [5]. Due to its technogenic (man-made) nature, this noise is typically non-Gaussian and impulsiv e, as has been verified by field measurements. Therefore, PLC noise can be modelled as combination of two terms: thermal noise which is assumed to be additive white Gaussian noise (A WGN), and the impulsive noise that may be synchronous or asynchronous relativ e to the main frequency [6]. It is observed that the primary noise component in broadband PLC (BB-PLC) [7], [8] is asynchronous and impulsi ve with short duration, i.e., high power impulses (up to 50 dB above thermal noise po wer [7]) with random arrivals. In [9] and IEEE P1901.2 standard [10], it is shown that in NB-PLC, the dominant non-Gaussian noise is a quasi-periodic impulsive noise ( cyclostationary noise ). Such noise occurs periodically with half the A C (Alternating Current) cycle with the duration ranging from hundreds of microseconds to a few milliseconds. Howe ver , it has been also claimed that asynchronous impulsi ve noise is simultaneously present in the higher frequency bands of NB-PLC [2], [3]. The reduction in sub-channel signal-to-noise ratio (SNR) in highly impulsiv e noise en vironments such as PLC can be too severe to handle by forward error correction (FEC) and frequency-domain block interleaving (FDI) [11], or time- domain block interleaving (TDI) [12]. V arious approaches to deal with impulsiv e noise in OFDM hav e been proposed in prior works. Many of those approaches assume a statistical model of the impulsive noise and use parametric methods in the receiv er to mitigate impulsiv e noise. Considering a specific statistical noise model, one can design a periodically switching moving a verage noise whitening filter [13], linear minimum mean square error (MMSE) equalizer in frequency domain [14] or iterati ve decoder [15] to mitigate cyclostationary noise. Such parametric methods require the ov erhead of training and parameter estimation. In addition, difficulty in parameter esti- mation and model mismatch degrade the system performance in time varying non stationary noise. Alternately , nonlinear approaches can be implemented in or- der to suppress the effect of impulsi ve noise. The performance of memoryless digital nonlinear methods such as clipping [16], blanking [17], and combined blanking-clipping [18] have been in vestigated in prior literature. It has been shown that for these methods, good performance is achiev ed only for asynchronous impulsiv e noise, and for high signal-to-interference ratios (SIR) [4]. T o address the challenge of severe impulsiv e noise conditions, a two-stage nulling algorithm based on iterati ve channel estimation is proposed in [19]. Howe ver , all these digital nonlinear approaches are implemented after the analog- to-digital con vertor (ADC). The main drawback of these approaches lies in the fact that during the process of analog- to-digital con version, the signal bandwidth is reduced and an initially impulsiv e broadband noise will appear less impulsiv e [20]-[21]. This makes the remov al of impulsi vity much harder by digital filters. Although, such problems can be ov ercome by increasing the sampling rate, it increases complexity and cost making it inefficient for real-time implementation [3], [22]. In this work, unlike other prior approaches we mitigate impulsiv e noise in the analog domain before the ADC by using a blind adaptiv e analog nonlinear filter , referred to as Adaptiv e Nonlinear Differential Limiter (ANDL). In this technique, the adaptation is done by adjusting a single resolution parameter to work efficiently in the presence of various types of impulsi ve noise (asynchronous and cyclostationary impulsiv e noise, or combination of both) without the detailed knowledge of the noise distribution. Since ANDL is nonlinear , their effects on the desired signal are totally different than on the impulsi ve noise. This feature allo ws the filter to increase the signal to noise ratio (SNR) in the desired bandwidth by reducing the spectral density of non-Gaussian noise without significantly affecting the desired signal. Analog structure of this method allows us to use ANDL either as a stand-alone approach, or in combination with other digital impulsive noise reduction approaches. Our preliminary work in [3] highlighted the basics of the ANDL approach, and its results were limited to the study of general behavior of SNR in a conceptual system without realistic OFDM transmitter and receiv er modules. In this paper , we extend the analysis by explicitly qualifying the bit error rate (BER) performance of a practical OFDM- based PLC system. Additionally , unlike [3], we illustrate the performance gains offered by ANDL relativ e to other con ventional approaches such as blanking and linear filtering. Finally , for the first time, we present a simple method to determine an ef fectiv e v alue for the resolution parameter that maximizes signal quality while mitigating the impulsiv e noise. The remainder of this paper is organized as follo ws. Section II describes the considered system and noise models. Proposed ANDL approach including resolution parameter calculation is described in section III. Section IV presents simulation results and finally conclusions are drawn in Section V . I I . S Y S T E M A N D N O I S E M O D E L S W e consider an OFDM system with complex baseband equiv alent representation shown in Fig. 1. In this system, information bits are independently and uniformly generated and mapped into baseband symbols s k based on phase shift keying (PSK) or quadrature amplitude modulation (QAM) scheme with Gray coding. The symbols s k are sent through an OFDM modulator which employs an in verse discrete Fourier transform (IDFT) to transmit the symbols ov er orthogonal subcarriers. The output analog signal env elope in time domain can be written as s ( t ) = 1 √ N N − 1 X k =0 s k e j 2 πk t T p ( t ) , 0 < t < T , (1) where N is the number of subcarriers, T is duration of one OFDM symbol and p ( t ) denotes the root-raised-cosine pulse shape with roll-off factor 0 . 25 . It is assumed that the number of subcarriers is large enough so that Central Limit Theorem (CL T) can be inv oked to sho w that the real and imaginary parts of the OFDM signal s ( t ) can be modeled as Gaussian random variables. In general, for different applications, we can construct an OFDM symbol with M non-data subcarriers and N − M data subcariers. The non-data subcarriers are either pilots for channel estimation and synchronization, or nulled for spectral shaping and inter-carrier interference reduction. W ithout loss of generality , the po wer of transmitted signal is normalized to unity , i.e., σ 2 s = 1 . Since the primary focus of this work is to study the impact of impulsive noise on OFDM performance, we consider a simple additiv e noise channel model where the recei ved signal corresponds to r ( t ) = s ( t ) + w ( t ) + i ( t ) . (2) Here, s ( t ) denotes the desired signal with v ariance σ 2 s , w ( t ) is complex Gaussian noise with mean zero and variance σ 2 w , and i ( t ) represents the impulsi ve noise which is not Gaussian. The receiv er inv olves a typical OFDM demodulator as shown in Fig. 1. This traditional receiv er structure is modified in order to deal with impulsi ve noise i ( t ) as briefly discussed in the introduction section. Unlike most con ventional impulsi ve noise mitigation approaches which are applied after the ADC, the proposed ANDL is implemented before the ADC. In the following, we begin with a revie w of the impulse noise models commonly encountered in PLC systems. A. Impulsive Noise Models T wo types of impulsi ve noise that are dominant in the 3–500 KHz band for NB-PLC and in the 1.8–250 MHz band for BB- PLC are cyclostationary impulsi ve noise, and asynchronous impulsiv e noise, respecti vely [2]. Since both types of impulsi ve noises are presented in the NB-PLC [2], [3], our impulsiv e noise model consists of both cyclostationary and asynchronous impulsiv e noises. 1) Cyclostationary impulsive noise: This type of impulsiv e noise has a duration ranging from hundreds of microseconds to a few milliseconds [2], [3]. Based on field measurements [10], the dominant part of this noise is a strong and narrow exponentially decaying noise burst that occurs periodically with half the A C cycle ( f AC = 60 H z ). Therefore, we can model such noise as i cs ( t ) = A cs ν ( t ) ∞ X k =1 exp − t + k 2 f AC τ cs ! θ t − k 2 f AC , (3) C on s t e l l a t i on M a ppe r ( P S K or Q A M ) 0 1 2 ... d d d 0 1 2 ˆ ˆ ˆ ... d d d C ons t e l l a t i on D e m a ppe r & D e t e c t i on P / S S / P I F F T FFT P / S S / P D / A P u l se sh a p i n g ( R o o t R a i s e d C o s i n e ) T h e r m a l N o i s e + I m p u l s i v e N o i s e N D L I nf or m a t i on B i t s A / D M a t c h e d F i l t e r ( R o o t R a i s e d C o s i n e ) Fig. 1: System Model Time (ms) 34.2 34.3 34.5 Amplitude Time (ms) 0 10 20 30 40 Amplitude Freq (MHz) 0 0.4 0.8 1.2 1.6 2 PSD (dB) -60 -40 -20 0 Fig. 2: Cyclostationary impulsi ve noise where A cs is a constant, τ cs is decaying time parameter, ν ( t ) is complex white Gaussian noise process with zero mean and variance one, and θ ( t ) is Heaviside step function. The spectral density of this noise is shaped based on measured spectrum of impulsi vity in practice (power spectrum density (PSD) decaying at an approximate rate of 30 dB per 1 MHz) [10]. The resulting time domain and frequency domain representation of this noise is depicted in Fig. 2. 2) Asynchr onous impulsive noise: This type of impulsive noise consists of short duration and high power impulses with random arriv al. Mathematically , we hav e i as ( t ) = ν ( t ) ∞ X k =1 A k θ ( t − t k ) e − t + t k τ as , (4) where A k is the amplitude of k th pulse, t k is a arriv al time of a poisson process with parameter λ , and τ as is decaying time parameter and has a duration about fe w microseconds. The time domain and frequency domain representation of this noise is depicted in Fig. 3. I I I . A N D L D E S I G N In this section, we provide an introduction to the basics of the ANDL and the method that can be used to find an effecti ve value for the resolution parameter of the filter to mitigate impulsi ve noise. Time (ms) 0 1 2 Amplitude Time (ms) 0.9 0.92 0.94 0.96 0.98 Amplitude Freq (MHz) 0 0.4 0.8 1.2 1.6 2 PSD (dB) -1 0 1 Fig. 3: Asynchronous impulsi ve noise A. ANDL F ormulation ANDL is a blind adaptiv e analog nonlinear filter that can be perceiv ed as a 1st order time varying linear filter with the time parameter τ ( t ) , that depends on the magnitude of the difference between the input and the output, as discussed in our previous work [3], [23]. Thus, we hav e χ ( t ) = x ( t ) − τ ( | x ( t ) − χ ( t ) | ) ˙ χ ( t ) , (5) where x ( t ) and χ ( t ) are the input and output of the filter, respectiv ely , and the dot denotes the first time deriv ativ e. As il- lustrated in Fig. 4, the time parameter τ ( t ) = τ ( | x ( t ) − χ ( t ) | ) is giv en by τ ( | x ( t ) − χ ( t ) | ) = τ 0 × ( 1 | x ( t ) − χ ( t ) | ≤ α ( t ) | x ( t ) − χ ( t ) | α ( t ) otherwise , (6) where τ 0 is a fixed time constant that ensures the desired bandwidth and α ( t ) is the resolution parameter of the filter and should be determined to mitigate the impulsiv e noise efficiently . Although in general the ANDL is a nonlinear filter , it behav es like a linear filter as long as there are no outliers and the magnitude of the difference signal | x ( t ) − χ ( t ) | remains within a certain range determined by the resolution parameter . Howe ver , when outliers are encountered, the proper selection of resolution parameter ensures that the magnitude of the cor- | x ( t ) − χ ( t ) | / α ( t ) 0 1 2 3 4 5 τ ( t ) / τ 0 0 1 2 3 4 5 Fig. 4: ANDL time parameter τ ( t ) = τ ( | x ( t ) − χ ( t ) | ) . responding outliers are suppressed by the nonlinear response of the ANDL. B. Resolution P arameter Calculation The configuration of the ANDL [23] consists of a feedback mechanism that monitors the peakedness of the signal plus noise mixture and provides a time-dependent resolution pa- rameter α ( t ) which ensures impro vement in the quality of non- stationary signals under time-varying noise conditions. The idea is to pick an ef fectiv e value of α ( t ) that allows the signal of interest to completely go through the nonlinear filter without any suppression and at the same time mitigate the impulsiv e noise, maximally . F or implementation simplicity , we assume that SNR variations are slower relativ e to the OFDM symbol duration. Therefore, we can fix the resolution parameter for each OFDM symbol duration α ( t )= α and allo w it to change across symbols. The lower bound of the resolution parameter can be found based on difference signal | x ( t ) − χ ( t ) | in case of no impulsiv e noise. An estimate of the dif ference signal can be obtained by passing signal s ( t ) + w ( t ) through a linear highpass filter . Let z ( t ) be given by a differential equation for the 1st order highpass filter with the time constant τ 0 . Then, we hav e z ( t ) = τ 0 [ ˙ s ( t ) + ˙ w ( t ) − ˙ z ( t )] , (7) Lemma 1 provides a lower bound for the choice of resolution parameter α . Lemma 1. The efficient value of the r esolution parameter α eff , for (1 − ε ) level distortionless filtering of the transmitted OFDM signal in thermal noise is erf − 1 (1 − ε ) √ 2 σ z , where σ 2 z is the variance of z ( t ) and ε is a sufficiently small constant. Pr oof. Since s ( t ) and w ( t ) are independent, for a sufficiently large N it follows from the CL T that z ( t ) is a complex Gaussian random variable with zero mean and v ariance σ 2 z . From equations (5) and (6), the ANDL preserves its linear behavior for | z ( t ) | ≤ α . Therefore, for (1 − ε ) distortionless filtering of the transmitted OFDM signal in thermal noise, we require that Pr ( | z ( t ) | > α ) ≤ ε 1 . (8) Since z ( t ) is Gaussian, we ha ve Pr( | z ( t ) | > α ) = 1 − erf α σ z √ 2 ≤ ε, (9) where erf ( . ) is the error function. Solving equation (9) with respect to α , we obtain α eff , ≥ erf − 1 (1 − ε ) √ 2 σ z , (10) In practice, a choice of ε = 4 . 68 × 10 − 3 leads to α ≥ 2 √ 2 σ z , i.e., α eff = 2 √ 2 σ z and we use sample variance instead of statistical variance σ 2 z as it can be computed online and can track possible nonstationary behavior . I V . S I M U L A T I O N R E S U LT S In this section, as a specific e xample we consider an OFDM- based NB-PLC in PRIME. Based on IEEE P1901.2 standard [10] the sampling frequency has been chosen as f s = 250 kHz and the FFT size is N = 512 , i.e, the subcarrier spacing f = 488 Hz. As carriers N = 86 − 182 are occupied for data transmission based on the PRIME model, the desired signal is located in the frequency range 42-89 kHz [24]. The system is inv estigated in a noise en vironment that is typical for NB-PLC and it consists of three components (1) thermal noise (with PSD decaying at rate of 30 dB per 1 MHz) (2) periodic c yclostationary exponentially decaying component with the repetition frequency at twice the A C line frequency and duration ranging from hundreds of microseconds to a fe w milliseconds, and (3) asynchronous random impulsive noise with normally distributed amplitudes captured by a poisson arriv al process with parameter λ . W e use first order ANDL, with τ 0 =1 / (2 π f 0 ) and corner frequency f 0 =2 × 89 kHz, which is follo wed by a 2nd order linear filter with the time parameter τ = τ 0 and the quality factor Q = 1 . It is important to note that in the considered system model, the matched filter can take the role of the linear filter . When α → ∞ this ANDL becomes a 3rd order Butter - worth filter with cutoff frequency twice the highest frequency of the desired signal. All simulations have been performed for BPSK modulation and the cyclostationary impulsive noise is simulated as a damped sinusoid based on equation (3) and it lasts for 200 µs (one tenth of OFDM symbol). The asyn- chronous impulsive noise is added to the transmitted signal with different probability of impulsivity based on equation (4) which lasts for 2 µs . Since the cyclostationary noise is dominant in the NB-PLC, we set the power of this component three times higher than the asynchronous impulsive noise. W e mimic the analog domain by oversampling the transmitted OFDM signal by factor 40 and downsampling after ANDL. In the following, BER of the OFDM system is used as the metric to e valuate the performance of ANDL in comparison with other con ventional approaches such as linear filtering and blanking. Since, the noise is essentially stationary in the system, we can pick the effecti ve α based on lemma 1 for a fixed SNR leading to a classic ANDL implementation. Fig. 5 sho ws the power spectral density (PSD) for a gi ven signal to thermal plus impulsiv e noise ratio (SINR) after impulsiv e noise mitigation filter . It is e vident that we hav e significant impulsive noise suppression in passband with the Frequency (KHz) 0 20 40 60 80 100 120 PSD (dB) -30 -20 -10 0 10 20 SNR = 0 dB, SIR = -15 dB After ANDL After Linear Desired Signal After ANDL (Only Desired Signal) Fig. 5: Power Spectral Density . Eb/N0 (dB) 0 2 4 6 8 10 12 14 16 18 20 BER 10 -4 10 -3 10 -2 10 -1 10 0 1/ λ = 4e -5 s ANDL, SIR = -6 dB ANDL, SIR = -3 dB ANDL, SIR = 0 dB BLN, SIR = -6 dB BLN, SIR = -3 dB BLN, SIR = 0 dB LIN, SIR = -6 dB LIN, SIR = -3 dB LIN, SIR = 0 dB Fig. 6: BER versus SNR with fix ed SIR. ANDL compared to the suppression offered by a linear filter . This figure also shows that when there is no impulsi ve noise, the ANDL does not distort our desired signal in the passband. This disproportional effect of ANDL over the impulsi ve noise and desired signal in the passband results in significant SNR improv ement at the receiv er . T o demonstrate the robustness of the ANDL to dif ferent types of impulsiv e noise, we consider the case when both asynchronous and cyclostationary impulsiv e noise impact the signal simultaneously . The BER performance of proposed approach for different v alues of SIR versus SNR is shown in Fig. 6. W e compare the ANDL performance with blanking and the optimal threshold for blanking is found based on an exhausti ve numerical search. Fig. 6 shows that the ANDL based reception results in better BER performance relativ e to blanking and linear filter especially in high SNR. The BER performance of the system for a given SINR versus SNR is shown in Fig. 7. Since SINR is fixed, we hav e more impulsivity when thermal noise is lo w (i.e., high SNR region). Fig. 7 shows that the performance of blanking and linear filter remains almost unchanged while the ANDL shows a significant improvement in high SNR region. This result Eb/N0 (dB) 0 2 4 6 8 10 12 14 16 18 20 BER 10 -3 10 -2 10 -1 10 0 1/ λ = 4e -5 s ANDL, SINR = -10 dB ANDL, SINR = -5 dB BLN, SINR = -10 dB BLN, SINR = -5 dB LIN, SINR = -10 dB LIN, SINR = -5 dB Fig. 7: BER versus SNR with fix ed SINR. Eb/N0 (dB) 0 5 10 15 20 BER 10 -3 10 -2 10 -1 10 0 SIR = -3 dB, 1/ λ = 4e -5 s α ef f 2 α ef f 5 α ef f 10 α ef f 200 α ef f 0.5 α ef f Fig. 8: Effect of resolution parameter on ANDL performance. highlights the ef fectiv eness of the ANDL in se vere impulsive noise en vironments. The importance of choosing optimum resolution parameter α is sho wn in Fig. 8. This figure sho ws the ANDL performance for different values of α for gi ven amount of impulsive noise. W e can see that the best performance is observed when α is selected based on lemma 1. As we de viate from this choice, the performance degradation is gradual and in many cases still superior to the linear filter performance (captured by setting α to a high value). Finally , Fig. 9 shows that ANDL, with proper selection of resolution parameter α based on lemma 1 and suf ficiently flat frequency response in passband, can be used as a general front end and operates as a linear filter when there is no impulsive noise. W e achiev e the theoretical A WGN performance indicat- ing that our desired signal passes through the ANDL without any distortion as would be the case with a linear filter . V . C O N C L U S I O N In this study , a blind adaptive analog nonlinear filter , re- ferred to as Adaptive Nonlinear Dif ferential Limiter (ANDL) is proposed to mitigate asynchronous and cyclostationary Eb/N0 (dB) -4 -2 0 2 4 6 8 BER 10 -4 10 -3 10 -2 10 -1 10 0 ANDL without Impulsive Noise Theoretical BER (AWGN) Fig. 9: ANDL performance without impulsi ve noise. impulsiv e noises in OFDM-based PLC receiv er . In addition, a practical method to find an ef fective value for the resolution parameter of ANDL is presented. W e demonstrate the ability of ANDL to significantly reduce the PSD of impulsi ve noise in the signal passband without having prior knowledge of the statistical noise model or model parameters. The results show that ANDL can provide improvement in the ov erall signal quality ranging from distortionless behavior for low impulsiv e noise conditions to significant improvement in BER performance in the presence of strong impulsive component. It also has been shown that the performance of ANDL can be enhanced by careful selection of resolution parameter . It is important to note that ANDL can be deployed either as a stand-alone low-cost real-time solution for impulsive noise mitigation, or combined with other interference reduction techniques. R E F E R E N C E S [1] S. Galli, A. Scaglione, and Z. W ang, “For the grid and through the grid: The role of power line communications in the smart grid, ” Pr oc. IEEE , vol. 99, no. 6, pp. 998–1027, Jun. 2011. [2] J. Lin, M. Nassar , and B. L. Evans, “Impulsiv e noise mitigation in powerline communications using sparse Bayesian learning, ” IEEE J. Sel. Ar eas Commun. , vol. 31, no. 7, pp. 1172–1183, Jul. 2013. [3] A. V . Nikitin, D. Scutti, B. Natarajan, and R. L. Davidchack, “Blind adaptiv e analog nonlinear filters for noise mitigation in powerline communication systems, ” in Proc. IEEE Int. Symp. on P ower Line Commun. and its Appl. , Mar . 2015, pp. 1–6. [4] S. V . Zhidkov , “ Analysis and comparison of several simple impulsiv e noise mitigation schemes for OFDM receivers, ” IEEE T rans. Commun. , vol. 56, no. 1, pp. 5–9, Jan. 2008. [5] J. Lin and B. L. Ev ans, “Non-parametric mitigation of periodic impulsi ve noise in narro wband po werline communications, ” in Pr oc. IEEE Global Comm. Conf. , Dec. 2013, pp. 2981–2986. [6] M. Zimmermann and K. Dostert, “ Analysis and modeling of impulsi ve noise in broad-band powerline communications, ” IEEE T ran. Electr o- mag. Compat. , v ol. 44, no. 1, pp. 249–258, Feb. 2002. [7] ——, “ An analysis of the broadband noise scenario in powerline networks, ” in Proc. IEEE Int. Symp. on P ower Line Commun. and its Appl. , Apr . 2000, pp. 5–7. [8] M. Nassar , K. Gulati, Y . Mortaza vi, , and B. L. Evans, “Statistical modeling of asynchronous impulsive noise in powerline communication networks, ” in Pr oc. IEEE Global Comm. Conf. , Dec. 2011, pp. 1–6. [9] M. Nassar, A. Dabak, I. H. Kim, T . Pande, and B. L. Ev ans, “Cyclo- stationary noise modeling in narrowband po werline communication for Smart Grid applications, ” in Proc. IEEE Int. Conf. on Acoust., Speech and Sig. Pr ocess. , Mar . 2012, pp. 3089–3092. [10] IEEE Standar d for low frequency narr owband power line communica- tions , Std., 2012. [11] M. Nassar, J. Lin, Y . Mortazavi, A. Dabak, I. H. Kim, and B. L. Evans, “Local utility po wer line communications in the 3–500 kHz band: Channel impairments, noise, and standards, ” IEEE Signal Process. Mag . , vol. 29, no. 5, pp. 116–127, Sep. 2012. [12] A. Al-Dweik, A. Hazmi, B. Sharif, and C. Tsimenidis, “Ef ficient inter- leaving technique for OFDM system over impulsive noise channels, ” in Pr oc. IEEE Int. Symp. on P ersonal, Indoor and Mobile Radio Commun. , Sep. 2010, pp. 167–171. [13] J. Lin and B. L. Evans, “Cyclostationary noise mitigation in narrowband powerline communications, ” in Pr oc. Asia P acific Signal and Info. Pr ocess. Association Annual Summit and Conf. , Dec. 2012, pp. 1–4. [14] Y . Y oo and J. Cho, “ Asymptotic analysis of CP-SC-FDE and UW -SC- FDE in additive cyclostationary noise, ” in Pr oc. IEEE Int. Conf. Comm. , May 2008, pp. 1410–1414. [15] J. Haring and A. J. H. Vinck, “Iterativ e decoding of codes ov er complex numbers for impulsive noise channels, ” IEEE T rans. Inf. Theory , vol. 49, no. 5, pp. 1251–1260, May 2003. [16] D.-F . Tseng et al. , “Robust clipping for OFDM transmissions over memoryless impulsive noise channels, ” IEEE Commun. Lett. , vol. 16, no. 7, pp. 1110–1113, Jul. 2012. [17] C.-H. Y ih, “Iterati ve interference cancellation for OFDM signals with blanking nonlinearity in impulsi ve noise channels, ” IEEE Signal Pr ocess. Lett. , vol. 19, no. 3, pp. 147–150, Mar. 2012. [18] M. Korki, N. Hosseinzadeh, H. L. V u, T . Moazzeni, and C. H. Foh, “Impulsiv e noise reduction of a narro wband po wer line communication using optimal nonlinearity technique, ” in Pr oc. Aust. T elecomm. Netw . and App. Conf. , No v . 2011, pp. 1–4. [19] Y . R. Chien, “Iterative channel estimation and impulsi ve noise mitigation algorithm for ofdm-based receivers with application to power -line com- munications, ” IEEE T rans. P ower Del. , vol. 30, no. 6, pp. 2435–2442, Dec. 2015. [20] A. V . Nikitin, “On the interchannel interference in digital communication systems, its impulsive nature, and its mitigation, ” EURASIP J . Adv . Signal Pr ocess. , no. 1, p. 137, Dec. 2011. [21] A. V . Nikitin, R. L. Davidchack, and J. E. Smith, “Out-of-band and adjacent-channel interference reduction by analog nonlinear filters, ” EURASIP Journal on Adv . in Sig. Pr ocess. , no. 1, p. 12, Dec. 2015. [22] A. V . Nikitin and R. L. Davidchack, “ Adaptiv e approximation of feedback rank filters for continuous signals, ” Sig. Pr ocess. , vol. 84, no. 4, pp. 805–811, Apr . 2004. [23] A. V . Nikitin, “Method and apparatus for signal filtering and for improving properties of electronic devices, us patents 8,489,666 (16 july 2013), 8,990,284 (24 march 2015), 9,117,099 (august 25, 2015), 9,130,455 (8 september 2015), and 9,467,113 (11 october 2016). ” [24] M. Hoch, “Comparison of PLC G3 and PRIME, ” in Pr oc. IEEE Int. Symp. on P ower Line Commun. and its Appl. , Apr. 2011, pp. 165–169.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment