Interlocking of convex polyhedra: towards a geometric theory of fragmented solids
We present structures comprised of identical convex polyhedra which are interlocked geometrically. These sets cannot be disassembled by removing individual polyhedra by translations and/or rotations. The shapes that permit interlocking arrangements i…
Authors: A. J. Kanel-Belov, A. V. Dyskin, Y. Estrin
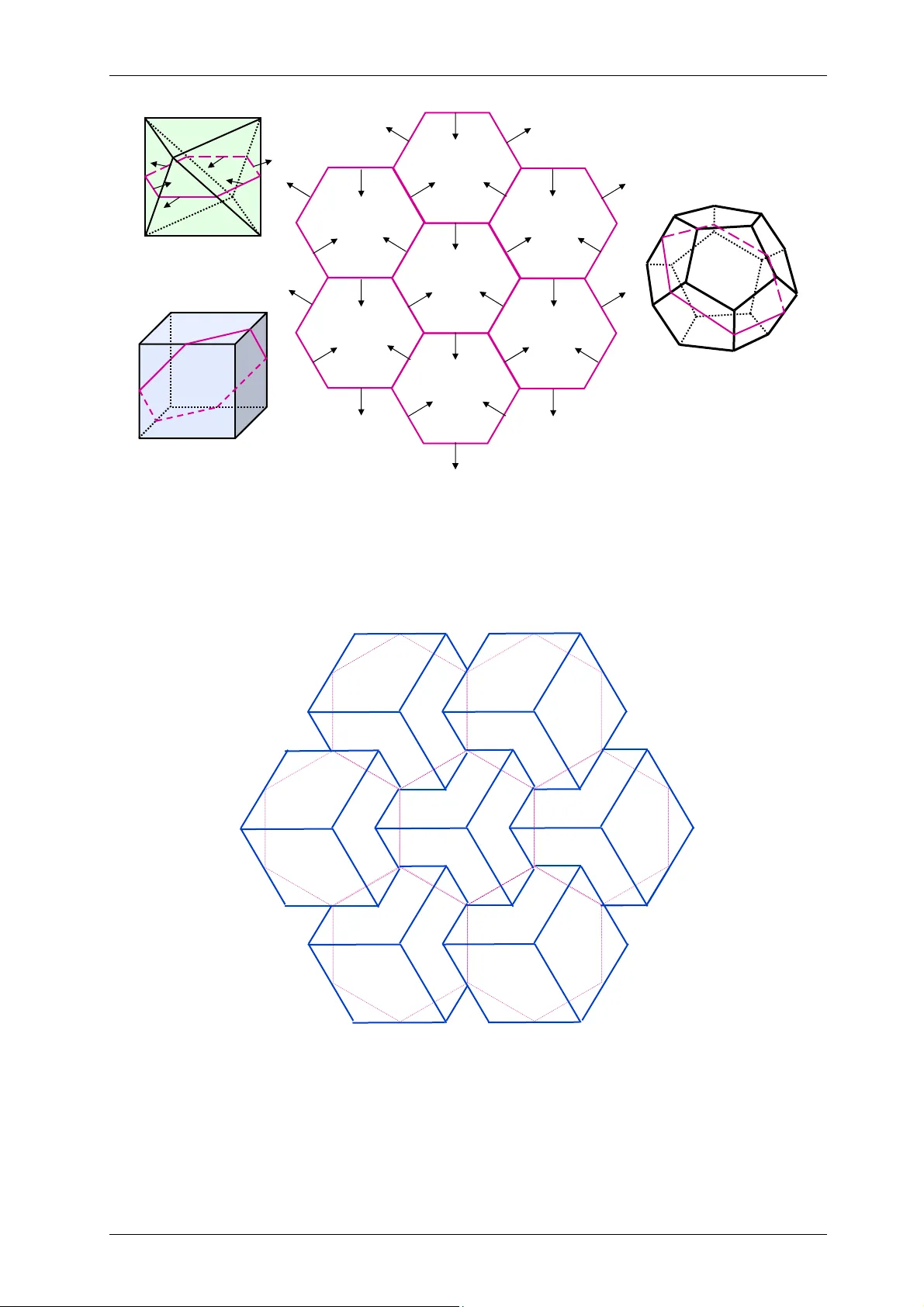
Interlocking of convex polyhedra: towa rds a geometric theory of fragmented solids anov-Pogodaev + ational mccme.ru e Un iversity of Western Australia, 35 Stirling .au Department of Materials Engineering, Mona sh University, Clayton, Vic. 3800, Australia n, Vic. 3168, a.edu.au ity of Western Australia, 35 Stirling Highway, Crawley WA 6009, Australia, vy Gory, re interlocked s cannot be disa ssembled by removing individual polyhedra by translations and/or rotations. Th e shapes that pe rmit interlocki ng arrangements include all five s. Criteria for interlocking based on transforma tions of the cross- sections of the formulated. A layer of four- is described. r a interlocked geometrical properties. at one of these refore, any set osed to simple othetic transformation of the plane, which autom atically puts the figures out of contact One may think that this statement holds for high er dim ensions as well. However, attempts to generalize it to R 3 have been unsuccessful. As a counter example, structures consisting of convex solid bodies which cannot be disasse mbled by removing individual bodies were suggested in Ref. [1]. Their example was co mplicated and was constr ucted in a non regular way. The simplest possible interlocki ng structures would be layer-l ike ones, i.e. sets of convex bodies situated in a layer between two parallel planes [2]. A. J. Kanel-Belov § , A. V. Dyskin * , Y. Estrin † , E. Pasternak**, I. A. Iv § Moscow Institute of Open Education, B.Vl asiev skii-11, Moscow, Russia, Intern University Bremen, Campus ring 1, 28759, Bremen, Germany. E-mail: kanel@ * School of Civil and Resource Engineering, Th Highway, Crawley WA 6009, Australia, E-m ail: adyskin@cyllene.uwa.edu † ARC Centre of Excellence fo r Design in Light Metals, and CSIRO Division of Manufacturing and Materials Technology, Clayto Australia E-mail: estrin@mech.uw **School of Mechanical Engineering, The Un ivers + Department of Mechanics and Mathematics, Moscow State University, Vorobie Moscow, 119898, Russia E-mail: ivanov-pogodaev@mail.ru Abstract We present structures comprised of iden tical convex polyhedra which a geometrically. These set platonic solid elements in a 3D reconstruction of a layer fr om its m iddle cross-section are generalization to higher dimensions is also give n. In particular, an interlocking dimensional cubes 1 Introduction This article presents a collect ion of structures of identi cal convex polyhed geometrically. Methods for generating such struct ures are discussed along with their general Consider a set of contacting convex figures in R 2 . It is not difficult to prove th figures can be moved out of the set by translation without disturbing othe rs. The of planar figures can be di sassembled by m oving all figures one by one (as opp hom with each other). Kanel-Belov, Dy skin, Estrin, Paster nak, Ivanov 2 Interlocki ng of convex poly hedra 30/12/2008 7:04 PM File: Kanel-Belov First, we consider two types of reg ular tetrahedra. Let us call them A- tetra tetrahedron (figure 1). The lengt h of the upper edges of both te trahedra, whic perpendicular, is taken to be unity. Both te trahedra are completely defined edges. It is clear that it is pos sible to place the tetrahedra in contact with each way that the front end of the upper edge of B and the middle of the upper edge of A becom hedron and B- h are mutually by their upper other in such a e congruent. In this case the distance between the centers of the tetrahedra equals 1. ch that their both coor dinates are integers. Suppose that the points with both odd or both even coordinates are «white» and the points with one odd and one even coordinate are «black». Suppos e that the white points are the centers of A-tetrahedra and black points are the centers of B-tetrahedra. Figure 2 shows a fragment of such a set of tetrahedra. Consider one of the A- tetrahed ra, call it X. There are four ne ighboring B-tetrahed ra: left, right, ttom. It is clear that four faces of X adjoin four neighboring B-tetrahed ra. Furthermore, left and right neighbors prev ent X from moving up while top and bottom ones prevent X from moving down. It is obvious that B-tetrahedra are al so «locked» by their neighbors. This situation is called « interlocking ». Definition 1. Let us consider a s et of solids (that m ay be infinite). Assume that for any solid X the following condition holds: if all the solids except X have a degree of freedom equal to 0 Figure 1. Tetrahedra of types A and B Now consider the set of points on the plane su Figure 2. Fragment of interlocking set of tetrahedra. top and bo Kanel-Belov, Dy skin, Estrin, Paster nak, Ivanov 3 Interlocki ng of convex poly hedra 30/12/2008 7:04 PM File: Kanel-Belov then X also has a degree of freedom equal to 0. In this case the set is called structure . The state of interl an interlocking ocking means that no one solid can be removed from the system, t hods of creating them. square lattice in two colors like an infinite chessboard. Let us 2. All arrows start in the m iddle of the corr esponding edge and are pe rpendicula r to it; es are inside; te squares top and bottom arrows are in side while left and right ones are outside. Now let us consider a plane based on an edge and lopsided to the dire ction of a corresponding arrow (Figure 3) Figure 3. Lopsided plane. Let us create such a plane for each edge using the same tilt angle α. Consider four planes of a particular square S. Obviously, these planes, if inclined at a proper angle, form a tetrahedron. This tetrahedron intersects with ou n itial chessboard plan e by the square S. Figure 4. Lopsided planes of the square that we obtain A-tetrahedr a for th e black squares and B ones for the white. Every tetrahedron is locked within the layer: The left and right neighbors prevent A- tetrahedra from moving up, while top and bottom nei ghbors prevent it from moving down. Our initial chessboard plane with arrows thus becomes a diagram representing an interlocking scheme. The arrows show how the tetrahedra lock their neighbors. since all other solids are immobile. Below we consider various types of interloc king structures and me First we consider how to create an in te rlocking structure using regular lattices. Suppose that we have a regular place an arrow at each edge using the following rules: 1. All arrows have the same length; 3. For black squares top and bottom arrows are outside while left and righ t on 4. For whi r i It is clear S Kanel-Belov, Dy skin, Estrin, Paster nak, Ivanov 4 Interlocki ng of convex poly hedra 30/12/2008 7:04 PM File: Kanel-Belov This process is referred to as the « moving cross-section procedure ». ace of the e length of the α , the slope of the face. For the squa re lattice consid ered above, this an be removed gineering as a ments without ce to fracture free of stress assemblies of rize interlocking se ts. etrahedra. This J. Kanel-Belov a new type of structing new gth assigned to rrows heading ms with their cline the lat scribed by the h the aforementioned c onvention. If these inclined faces are extended as in the above example, an in terlocking arrang ement of cubes (Fig. 6), octahedra (Fig. 7) or dodecahedra (Fig. 8) is generated, depending upon the ang le α [9]. All three resulting shapes correspond to the platonic bodies , as does the tetrahedron one considered above. It is interesting to note that for cubes the angle The orientation of an arrow indicates the direct ion of movement of the respective f polygon in the cross-section upon upward displacement of the section plane. Th arrow is proportional to tan arrow pattern is shown in Fig. 3. The above structure provides an example of an assembly in which no element c without disturbing its neighbors. It is appealing to use such arrangements in en new design principle. This principle allows one to build structures of convex ele a binder phase or connect ors, i.e., structures which (a) possess high resistan propagation (fractures getting stopped at inte rfaces between the elements) and concentrations associated with mechanical co nnectors used in conventional building blocks [3-7]. Thus, there is a practical need to find and characte It is interesting to note that such a configuration of tetr ahedra was first found by a civil engineer, Glickman [8], who pr oposed a pavement system based on truncated t structure went unnoticed by the mathematics community, however. The structures described are obta ined by tiling the plane with e qual squares. A. considered another regular ti ling - the hexagonal (honeycomb) one and found interlocking solids, which turn ou t to be si mple cubes! The recipe for con interlocking structures based on this tiling is as follows. Put arrows of equal len the faces of a hexagon in such a way that for any hexagon within the tiling the a inwards and outwards alternate, Fig. 5. Consider a layer of hexagonal pris honeycomb type middle section. In eral faces of the prisms as pre arrows in accordance wit ( ) 3 3 sin 1 − = α is the same as for tetrahedra. For octahedra this angle is sm aller: ( ) 3 1 sin 1 − = α . Kanel-Belov, Dy skin, Estrin, Paster nak, Ivanov 5 Interlocki ng of convex poly hedra 30/12/2008 7:04 PM File: Kanel-Belov Figure 5. Hexagonal tiling of the plane and the as sociated platonic solids with their respective hexagonal middle sections. Orientations of arrows indicate the inclinat ions of faces of the modified hexagonal prisms that provide their interlocking. Figure 6. Fragment of interlocking set of cubes. Kanel-Belov, Dy skin, Estrin, Paster nak, Ivanov 6 Interlocki ng of convex poly hedra 30/12/2008 7:04 PM File: Kanel-Belov Figure 7. Fragment of interlocking set of octahedra. Figure 8. Fragment of interlocking set of dodecahedra normal to the symm etry axis of 3 rd order. Kanel-Belov, Dy skin, Estrin, Paster nak, Ivanov 7 Interlocki ng of convex poly hedra 30/12/2008 7:04 PM File: Kanel-Belov The above examples cover all type s of platonic bodies, except for the icosahedro found by A.J. Kanel-Belov that icosahedra coul d be put in an interlocking ar decagonal middle cross-section of the icosahedron is used as a basis n. It was later rangement if a cagons can be y, Fig. 9, that n interlocking ted that not all on possesses a as well, a sim ilar decagon-based assem bly is possible with dodecahedra, Figs. 9, 11. Thus, dodecahedra permit two interlocking arrangem ents normal to their symmetry axes of 3 rd and 5 th order. 1 . The de arranged on a plane and arrows can be assigned to their faces in such a wa icosahedra reconstructed by th is moving cross-section procedure produce a assembly, Fig. 10 (see the Propositio n in the following section). It should be no faces of an icosahedron are in contact with its neighbors. As the dodecahedr decagonal middle cross-section Figure 9. Decagonal tiling of pl ane and the associated dodecahedron and icosahedron. Only arrows that correspond to contacting faces are shown. 1 It is worth mentioning that the same arrangement is also possible with truncated icosahedra (buckyballs) [7] which ar e the shap e of C 60 molecules some fullerenes consist of. Kanel-Belov, Dy skin, Estrin, Paster nak, Ivanov 8 Interlocki ng of convex poly hedra 30/12/2008 7:04 PM File: Kanel-Belov Figure 10. Fragment of interlocking set of icosahedra. Figure 11. Fragment of interlocking set of dode cahedra normal to th e symmetry axis of 5 th order. Kanel-Belov, Dy skin, Estrin, Paster nak, Ivanov 9 Interlocki ng of convex poly hedra 30/12/2008 7:04 PM File: Kanel-Belov 2 Geometry of interlocking: basic principles Consider a set of three-dimensional convex solids. Let us say that two solids ar they have contacting faces (strictly speaking: th ere exists a common circle on th plane containing these faces is called a border plane for both of these solids. S have two solids – a solid A and a s e connected , if eir faces). The uppose that we olid B respec tively and their contact (border) plane. This plane defines a vector half-sp ace of possible movement vectors for the solid A. Consider the ible movement .. raightforward. S uppose that V is a possible moveme nt vector. Then V belongs to ll vector half- is a possible Suppose that we have a convex polyhedron. Consid er the plane containing one face of the containing the alf-spaces (for ng faces of the alf-spaces. Let A) has a finite ude that the intersection of the border vector inner half-spaces is a zero vector. In this case border planes inscribe a finite volume: this half-spaces. Let P(A) has a finite volume. If the he corresponding vector Definition 2 . The set of polyhedra is called a layer if ion. Consider a layer of solids (pol yhedra) between two parallel plan es. Assume that a plane P is plane P be horizontal. This plane divides the polygon system edron system. ark the segments on the P plane which are situated on the border ones. In this way we obtain the faces view of an interlocking system . It is clear that every polyhedron looks as a polygon on our projection diagram. Now we assign an arrow to each of the segments using the following rules: 1. All arrows have the same length; 2. All arrows start in the m iddle of the corresponding segment and ar e perpendicular to it; set of all border planes for the given solid A. Proposition 1 . Let all solids in th e system except A be fixed. The set of poss vectors of A is an intersection of all vector half-spaces of the b order planes of A The proof is st all the half-spaces. On the contrary, if a vector belongs to an intersection of a spaces of the border planes, then nothing can stop the solid’s movem ent, so V movement vector. polyhedron. This plane divides space into two af fine half-spaces. The half-space polyhedron is called an inner half-space. The convex hull of all the affine inner h all faces) is obviously a polyhedron itself. Proposition 2. Let all solids in the system except A be fixed. Consider cont acti polyhedron A. These faces belong to border planes which d efine affine inner h P(A) be the convex hull of these inner half-spaces. A is locked if and only if P( volume. Proof. Let A be locked. Using Proposition 1 we concl area is a convex hull of the borde r affine convex hull of affine half-spaces if finite, th en the intersection of t spaces is a zero vector. So A cannot be moved in any direction. Now we are ready to for discuss in terlocking schemes with arrows. 1) the polyhedra are situated between two parallel planes; 2) all of them can be produced with the fi nite subset using a parallel translat parallel to those planes. Let the into a top and a bottom part. Below we consider only the top part of th e polyh Now we m Kanel-Belov, Dy skin, Estrin, Paster nak, Ivanov 10 Interlocki ng of convex poly hedra 30/12/2008 7:04 PM File: Kanel-Belov 3. Directions of the arrows corre spo nd to the inclination of each bo rder plane (the top part) relative to P. e obtained a chessboard-like in terlocking diagram with arrows, which was d interlocking istance d . tan α , e. During this to some value a polygon subjected to this evolu tionary transformation. As a result of this transform ation the nt or a point. In this case the polygon can be referred to as The interlocking criterion A layer of solids is a set with interlocking if and only if the fo llowing condition holds: evolutionary exactly the region bounded by border planes of the corres ponding polyhedron. So, the polygon vani shes if and only if this region is finite. Using Proposition 2 the proof is arrived at. 2.1 Criteria of degeneration of polygons and polyhedra ve, to determine whether a solid body of a particular geometry is interlocked, s of the secant gment of a straight line or to a point. Lemma 1 : A convex polygon M degenerates as a result of evolution Ε if, and only if, one of me faces of M , When interlocking in R 4 is considered, the follow ing lemma is instructive. : A convex polyhedron M degenerates as a result of evolution Ε if, and only if, one of the following occurs: (1) The distance between a pair of parallel planes, which are c ontinuations of some faces of M , vanishes. (2) Three faces of M are parallel to a line and form a dege nerating surface of a triangular prism. (3) A triangular prism whose faces ar e continuations of some faces of M degenerates. Thus we hav considered above. Let us move the plane P upward by a small di stance d. C onsider the change diagram. The segments have m oved in the direction marked by an arrow by a d where α is the angle between the plane P and th e corresponding border plan transformation the leng ths of the segments m ay ch ange. By varying d from zero D we are executing an evolutionary transformation of the interlocking diagram. Let us consider polygon may evolve to a segme vanishing. Theorem 1. For every polyhedron the corresponding polygon vanishes during the transformation. Proof. It is obvious that the phase space of a polygon’s evolution is This theorem, along with the proof , is immediately generalized to n dim ensions. As explained abo it is necessary to follow the evolution, Ε , of its cross-section due to translation plane and to check whether the cr oss-section degenerates to a se the following occurs: (1) The distance between a pair of parallel lines, which are c ontinuations of so vanishes. (2) A triangle whose faces are c ontinuations of som e faces of M degenerates. Lemma 2 Kanel-Belov, Dy skin, Estrin, Paster nak, Ivanov 11 Interlocki ng of convex poly hedra 30/12/2008 7:04 PM File: Kanel-Belov Generalisation to R n is achieved by replacing conditions (1 )-(3) in Lemma 2 wi k +1 hyperplanes of dimension n -2 parallel to an n -1- k d imensio th “There exist nal subspace N such that their projections onto the orthogonal complement of N form a collapsing simplex”. , the individual elements were cking if neither et will be used . If no element can be removed by a ny combination of translations and rotations . The elements fully locked , erence element ent permits the t. Therefore, v t of neighboring faces al element ents form a 6- convex cone. king. minimal set of , while C 2 is a nward ones. If g faces C 2 , then the t with full interlocking. neighbors are section of the hedra. This is n above. e can use the ere within the polyhedron itself so that if the sphere is locked then the whole polyhedron is locked. It is at if a sphere is translationally locked then it is fully locked. So we need only to choose the sphere and check that it is translationally locked. We will choose two different sph eres: one for up-lock ing and another for down-locking. Consider spheres S 1 and S 2 . The centre of S 1 is located below the middl e section, while that of S 2 is located above it. No movement of P can displace the centre of S 1 downward or that of S 2 2.2 Translational interlocking and full interlocking In the three-dimensional structures presente d in Introduction shown to be interlocked, meani ng that no element can be removed by transla tion. In principle, an element can be subjected to a combin ation of translations and rotations. Definition: A set of solid bodies is re ferred to as a set with translational interlo of them can be removed by translation. In what follows, the term interlocking s for brevity (translational-ro tational interlocking), the set is called a se t with full interlocking of the sets will be called translationally locked (or simply locked ) and respectively. Consider a vector field v corresponding to an infinitesimal m ovement of a ref out of the assembly. An infinitesimal part of a face of a neighboring elem movements whose vector fields are directed inward the reference elem en corresponds to an admissible movem ent if each infinitesimal elemen permits it. (For a translation, v =con st, a face blocks the movement if an infinitesim thereof does.) The set of vector fields corresponding to all infinitesimal movem dimensional space in which the set o f permitted infinitesimal movem ents form a We now demonstrate that the aforementioned structures are sets with full interloc Theorem 2: Consider a layer of translationally locked polyhedra. Let C 1 be a faces that ensure translational interlocking wi th regard to upward disp lacements minimal set of faces that ensure s translational interlocking with regard to dow the polyhedra contains two spheres: S 1 touching faces C 1 and S 2 touchin layer forms a se Remark : Such spheres do exist if (i ) the faces of a polyhedron in contact with its equally inclined to the middle plane and (ii) th e circle inscribed in th e m iddle polyhedron touches its faces at points of contact with the ne ighboring poly obviously the case for the squa re-based and hexagonal-based arrangements show Proof of Theorem: Note that an element is locked in a structure if a pa rt of it is locked. Thus, w following idea: replace each polyhedron by a sphe re. W e can define the sph obvious th Kanel-Belov, Dy skin, Estrin, Paster nak, Ivanov 12 Interlocki ng of convex poly hedra 30/12/2008 7:04 PM File: Kanel-Belov upward, as otherwise, the spacing between them would change (whi ch is prohibi body motion preserves distances). Th e movements of the sphere cen ters consis body motion are precisely those movem ents that are blocked by the neig ted, since rigid tent with rigid hboring elements. the proof. The above theorems establish full interlocki ng of assemblies shown in Figs. 2-5. Now we Consider Fig. dra normal to moves with a e faces of the . Due the symmetry, . Consider the e broken line velocity Therefore, P is fully locked, and so is the element containing P , which completes consider the remaining assemblies. Proposition: The layers corresponding to Fig. 7 are sets with full interlocking. 10 where the middle sections of the arrangem ents of icosahed ra and dodecahe their symmetry axes of 5 th order are shown. Suppose that the section plane constant velocity in the direction norm al to the plane of drawing such that th decagon in the section move in the directions indicated by the arrows to the faces of the decagon will move in th ese directions with a constant velocity, v common point of intersection of the continuations of faces e and g with th perpendicular to face c . This point will m ove in the direction of arrow c with e v ϕ sin /, where ϕ e is the angle between the broken line and faces e and g . This velocity is obviously greater than v , so that faces e and g will ev entually catch up with face c and the polygon will degenerate to a point. Therefore, according to Theorem 1, these layers are interlocking sets. decagon-based To prove full interlocking we note that for the assembly of icosahedr a the rotation of the reference element about any axis normal to line cf (Fig. 10) is blocked. Indeed, the plane contact areas at points c and f prevent the rotation, since each of them contains the base of the normal drawn from the centre of the reference icosahedron. Suppose there exists an axis the rotation about which is not blocked. An infinitesimal rotation about this axis is equivalent to an infinitesimal tangent vector field v 1 . Since the normal plane passing through cf is a plane of Figure 12. The contacts between the reference po lyhedron and its neighb ors in a arrangement. ϕ ϕ ψ c g d h f e Kanel-Belov, Dy skin, Estrin, Paster nak, Ivanov 13 Interlocki ng of convex poly hedra 30/12/2008 7:04 PM File: Kanel-Belov mirror symmetry, there exists a symmetrically situated axis with admissible such that v 1 + v 2 is a vector field parallel to the symmetr y plane. This vector field rotation vector field v 2 , corresponds to about an axis n ormal to line cf , which has been shown to be blocked. This completes The question whether in a general case a si ngle layer with interlocking provides full n. of cubes to R 4 . ) was obtained cipal diagonal created by the iagonal of the tes as the plane ne, the triangle e continues its ome equal and e same picture ymmetric way up to the degeneration of the section to a point. Thus, three faces of th e evolution. and hence the s is a set with nalogy to the n of the secant on, which inflates as the hyperplane moves. At some moment in th e evolution of the tetrahedron its ve rtices get truncated by two identical r translation of e degeneration an octahedron – can be continued to one of the tetrahedra, which degenerates as a result of the hyperplane movement. interlocking layer of 4D cubes can be constructed as follows. Fill Then attach a will be locked degenerate as interlocking structures So far we considered infinite interlocking layers whose construction was based on regular tilings of a plane. Finite stru ctures can be obtained by replaci ng the plane wit h, say, a sphere. Technically, it can be done as follows. Consider a sphere and match it with a sufficiently fine mesh with square and hexagonal cells. Consider the large polyhedron form ed by the nodes of the mesh. Attach arrows to its edges in alterna tin g order, in the same way as it was done for the the proof. interlocking remains ope 3 Four-dimensional cubes In this section we generalize th e recipe for generating interlocking st ructures The packing of three-dimensional cubes in a stru cture with interlocking (Fig. 4 by making use of the fact that a section of a cube by a plane norm al to its prin and passing through its center is a hexagon. The evolution of a polygonal section secant plane as it translates with its normal stay ing aligned with the principal d cube can be described as follows. As the plane traverses the cube starting from one end of the diagonal, it first generates as its cross-section an equilateral triangle, which infla translates. When the secant plane touches three ve rtices closest to th e starting o gets truncated by another equilateral triangle, wh ich shrinks as the seca nt plan movement. As the secant plane passes trough the c ube center, these triangles bec the section becomes hexagonal. Further translati on of the secant plane yi elds th in an antis the cross-section can be extende d to form a triangle which dege nerates during According to Lemma 1, the section its elf dege nerates during this ev olution arrangement of cubes based on the honeycomb pack ing of their m iddle section interlocking. A corresponding section for a f our-dimensional cube is an octahedron. In a evolution of the section of a three-dimensional cube, in 4 di m ensions translati o hyperplane starting from a cube vertex produces a tetrahedr another (shrinking) tetrahedron. Eventually, this results in the intersection of tetrahedra - an octahedron - which is the central section of the 4D cube. Furthe the secant hyperplane yields the s ame picture in an antisymm etric way up to th of the hypersection. Thus the middle section – Using the above pattern, an R 3 with octahedra by periodic tran slation of one octahedron in th ree directions. 4D cube to each octahedron making it to its ce ntral hypersection. These cubes as, according to Lemma 2, the hypersections parallel to the m iddle hypersection the secant hyperplane moves away from the middle one. 4 Finite Kanel-Belov, Dy skin, Estrin, Paster nak, Ivanov 14 Interlocki ng of convex poly hedra 30/12/2008 7:04 PM File: Kanel-Belov plane. Then using each face of the large po ly hedron as a base, construct a p faces inclined as prescribed by the arrows. The po lyhedra thus c onstructed form an interlock envelope. (For small enough polyhedra, mutual incl inations of the adjacent fac polyhedron will not violate the interloc olyhedron with ing es of the large king propert y.) The in terior of the interlocking envelope tained is non-convex. It can, however, be made convex if the halves of the blocks external to the large polyhedron are removed. The remaining envelope will als o oval from the ocked as well. f interest to find conditions for ber ing. Definition. A sublayer is a layer with a missing finite number of elem ents. that each sub- A question whether a differential interlocking layer ex ists remains open. The existence of such a layer would mean that it is possible to cons truct a convex structure of convex polyhedra with ng, without empty space in it, such th at the rem oval of the external layer does not e far-reaching covered so far ples presented. These structures, as well as conventional mas onry structures, cracked solids, b locky rock masses and some asteroids and comets are all ex am ples of fragmented bodies. Considerations a theory could mechanics of ling (e.g., [11]) protective tiles Acknowledgements . Support from the Australian Rese arch Council through the Discovery P0559737 (AVD) and DP0773839 (EP) is acknowledged. The first author acknowledges financial support from Israel science foundation under grant No (1178/06) and from the University of Western Australia through a Gledden Senior Visiting Fellowship. The authors are grateful to the anonymous reviewer w ho made a num ber of us eful suggestions that helped improving the manuscript. We would also like to thank Anna Sorokina and Editors for professional editing of this paper. can then be filled with arbitrary convex bodies. The interlocking set ob form a set with interlocking. In this structure the internal convex bodies only provide a filling and it is of no importance whether they are locked in themselves, since the envelope prevents their rem structure. In some cases, however, it is important that the inter nal solids be interl Suppose that some elements are deleted from the la yer. It is o the following property. For any finite number of missing elem ents in the layer a certain num of further elements can be deleted such that the rest of the laye r retains interlock Definition : An interlocking layer completely filled with convex polyhed ra such layer has a sublayer with inte rlocking is called differen tial interlocking layer . interlocki lead to disintegration of the entire structur e. This possibility would hav engineering applications. 5 Outlook The diversity of interlocking arrangements of regular convex polyhed ra un suggests that there might be a whole wealth of such structures beyond the exam presented show a way to develop a geometric theo ry of fragmented bodies. Such also shed light on some interesting natural phenomena, e.g., the integrity and flexible sandstones (e.g., [10]) or ancient build ing techniques, like dry stone wal and may have some exciting engineering applicati ons, such as a new concept of for Space Shuttle [12]. Grants D Kanel-Belov, Dy skin, Estrin, Paster nak, Ivanov 15 Interlocki ng of convex poly hedra 30/12/2008 7:04 PM File: Kanel-Belov 6 References eshchenie, 3, n, A.J. Kanel-Belov & E. Pasternak, 2001. A new concept in design of ents. Scripta g by fragmentation 888. TAM on-homogeneous ntegrity and uctural ogical interlocking rs Vol. 83, No. 3, , In: Second 984: 345-348. . Geol. London , 13, 119-128. 10. Radford, A. 2001. A Guide to Dry Stone Walling . The Growood Press Ltd., Ramsbury, Marlborrough, W iltshire. 11. Estrin, Y., A.V. Dyskin, E Pasternak, H. C. Khor & A J Kanel-Belov 2003. Topological interlocking of protective tiles for Space Shuttle. Phil. Mag. Letters , 83, 351-355. 1. Gal’perin, G.A., 1985, Russian Math. Surveys, 40, 229. 2. Kanel, A. Ya., 2001, A story of an olympiad problem, Matematicheskoe prosv No. 5, 207-208 (in Russian). 3. Dyskin, A.V., Y. Estri materials and structures: Assem blies of interlocked tetrahedron-shaped elem Materialia , 44, 2689-2694. 4. Dyskin, AV, Y Estrin, A J Kanel-Belov & E Pasternak, 2001. Toughenin - How topology helps. Advanced Engineering Materials , 3, Issue 11, 885- 5. Estrin, Y., Dyskin, A.V., Kanel-Belov, A.J. & Pasternak, E. 2002. Materials with novel architectonics: Assemblies of inte rloc ked elements. In B. Karihaloo (ed.) IU Symposium on Analytical and Computational Fracture Mechanics of N Materials , Kluwer Academic Press, 51-56. 6. Khor, C., Dyskin, A.V., Pasternak, E. Estr in, Y. and Kanel-Belov, A.J. 2002. I fracture of plate-like assemblies of topologically interloc ked elem ents. In: Str Integrity and Fracture, SIF2002 (Dyskin, A.V. Hu X.Z. and Sahouryeh, E., Eds), Swets & Zeitlinger, Lisse, 449-456. 7. Dyskin, A.V., Estrin, Y., Kanel-Belov, A.J. and Pasternak, E. 2003. Topol of platonic solids: A way to new materials and structures, Phil. Mag. Lette 197-203. 8. Glickman, M. 1984. The G-block system of vertically inte rlocking paving International Conference on Concrete Block Paving , Delft, April 10-12, 1 9. Dusseault, M.B. 1980. Itacolumites: the flexible sandstones. Q.J. eng
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment