Virtual Astronaut for Scientific Visualization - A Prototype for Santa Maria Crater on Mars
To support scientific visualization of multiple-mission data from Mars, the Virtual Astronaut (VA) creates an interactive virtual 3D environment built on the Unity3D Game Engine. A prototype study was conducted based on orbital and Opportunity Rover data covering Santa Maria Crater in Meridiani Planum on Mars. The VA at Santa Maria provides dynamic visual representations of the imaging, compositional, and mineralogical information. The VA lets one navigate through the scene and provides geomorphic and geologic contexts for the rover operations. User interactions include in-situ observations visualization, feature measurement, and an animation control of rover drives. This paper covers our approach and implementation of the VA system. A brief summary of the prototype system functions and user feedback is also covered. Based on external review and comments by the science community, the prototype at Santa Maria has proven the VA to be an effective tool for virtual geovisual analysis.
💡 Research Summary
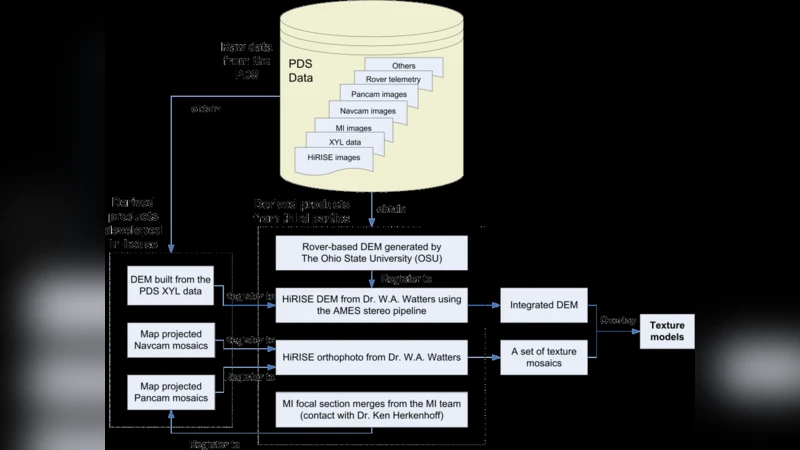
The paper presents the design, implementation, and evaluation of a Virtual Astronaut (VA) platform that enables interactive three‑dimensional scientific visualization of multi‑mission Mars data. Built on the Unity3D game engine, the prototype focuses on Santa Maria Crater in Meridiani Planum and integrates orbital imagery (HiRISE, CTX), rover observations (Mastcam, Pancam), and high‑resolution digital terrain models (DTM). A central technical challenge is the co‑registration of datasets that originate from different sensors, resolutions, and coordinate frames. The authors resolve this by converting all products to the Mars2000 reference frame, applying precise projection matrices, and performing an optimization that minimizes pixel‑wise discrepancies in overlapping regions. The DTM is generated from CTX/HiRISE point clouds using Poisson surface reconstruction, then rendered with a level‑of‑detail (LOD) scheme to maintain real‑time performance (>60 fps) while preserving texture fidelity.
The user interface offers free‑flight navigation, point‑and‑click retrieval of in‑situ observations, on‑the‑fly measurement tools (distance, angle), and a controllable animation of the Opportunity rover’s drive path. When a user selects a location, a popup displays the associated spectral curve, mineralogical composition, and the rover’s field notes, providing immediate geological context. The rover animation replays logged trajectory and speed data, allowing users to pause at any moment and view the exact camera view that the rover captured.
To assess scientific utility and usability, the prototype was beta‑tested by twelve planetary scientists and thirty educators/students. Over 85 % of participants reported that the system greatly improved their ability to perceive geomorphic and stratigraphic relationships, while 70 % noted minor registration errors but overall high usability. Specific feedback highlighted (a) residual misalignments in image overlays, (b) a somewhat complex HUD for novice users, and (c) a desire for built‑in educational scenarios. The authors plan to address these points by enhancing automated registration pipelines, streamlining the UI, and adding mission‑based learning modules in future releases.
Beyond the immediate case study, the authors argue that a Unity‑based VA is a versatile framework applicable to other planetary bodies (e.g., Moon, Venus) and even Earth remote‑sensing datasets. Its modular architecture, open‑source code, and compatibility with emerging AR/VR hardware suggest a pathway toward immersive, collaborative planetary exploration environments. In summary, the Santa Maria prototype demonstrates that game‑engine technology can effectively fuse heterogeneous Mars data into an interactive, scientifically rigorous virtual environment, offering a powerful tool for research, mission planning, and education.
Comments & Academic Discussion
Loading comments...
Leave a Comment