Choreography in the embedded systems domain: A systematic literature review
Software companies that develop their products on a basis of service-oriented architecture (SOA) can expect various improvements as a result of choreography. Current choreography practices, however, are not yet used extensively in the embedded systems domain even though SOA is increasingly used in this domain. The objective of this study is to identify current features of the use of choreography in the embedded systems domain for practitioners and researchers by systematically analysing current developments in the scientific literature, strategies for choreography adaption, choreography specification and execution types, and implicit assumptions about choreography. To fulfil this objective, a systematic literature review of scientific publications that focus on the use of choreography in the embedded systems domain was carried out. After screening, 48 publications were selected as primary studies and analysed using thematic synthesis. The main results of the study showed that there are differences in how choreography is used in embedded and non-embedded systems domain. In the embedded systems domain, it is used to capture the service interactions of a single organisation, while, for example, in the enterprise systems domain it captures the service interactions among multiple organisations. Additionally, the results indicate that the use of choreography can lead to improvements in system performance and that the languages that are used for choreography modelling in the embedded systems domain are insufficiently expressive to capture the complexities that are typical in this domain. The study results facilitate the work of practitioners by allowing them to make informed decisions about the applicability of choreography in their organisations.
💡 Research Summary
The paper presents a systematic literature review (SLR) that investigates how choreography—a coordination style originating from service‑oriented architecture (SOA)—is being adopted in the embedded systems domain. While choreography has been widely embraced in enterprise‑level SOA to describe cross‑organizational service interactions, its penetration into embedded environments remains limited despite the growing use of SOA in that sector. The authors set out to map the current state of research, identify prevailing adaptation strategies, examine specification and execution approaches, and uncover implicit assumptions that shape choreography’s applicability to embedded systems.
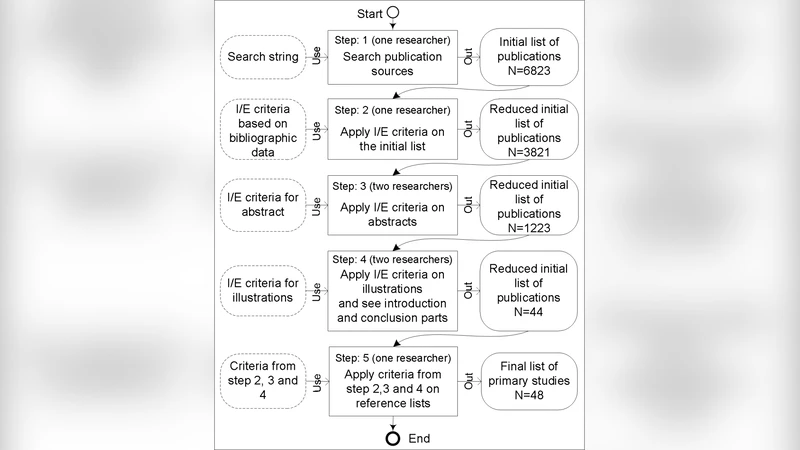
To achieve this, the authors performed a comprehensive search across major digital libraries (IEEE Xplore, ACM DL, Scopus, SpringerLink, etc.) covering the period 2010‑2023. Using a combination of keywords (“choreography”, “embedded systems”, “SOA”) and Boolean operators, they initially retrieved 1,237 records. After duplicate removal and a three‑stage screening process (title, abstract, full‑text), 48 primary studies were selected for in‑depth analysis. The selected papers were subjected to thematic synthesis, resulting in four major themes: (1) adaptation strategies for embedded contexts, (2) choreography specification and execution models, (3) underlying assumptions and constraints, and (4) reported benefits and limitations.
Adaptation Strategies – Embedded systems impose stringent real‑time, memory, CPU, and power constraints. Consequently, researchers propose lightweight middleware layers that couple resource‑efficient messaging protocols (e.g., MQTT, CoAP) with real‑time operating systems (RTOS). These layers aim to minimize runtime contract verification and to enable pre‑defined interaction flows that bypass a central orchestrator. Model‑based design techniques are also advocated to map choreography models directly onto hardware platforms early in the development lifecycle.
Specification and Execution – The authors find that mainstream choreography languages such as BPMN, WS‑CDL, and BPEL lack the expressive power required to capture asynchronous event handling, interrupt‑driven behavior, and hardware‑specific constraints typical of embedded devices. Several studies therefore introduce domain‑specific languages (DSLs) grounded in state‑machine semantics, enriched with timestamps, priority levels, and power‑management policies. These DSLs are coupled with code‑generation toolchains that emit C, C++, or Rust code, which can be integrated with real‑time schedulers. Execution models favor decentralized, peer‑to‑peer communication over a centralized orchestrator, thereby reducing network hops and latency.
Implicit Assumptions – A key observation is that choreography literature often assumes a “single‑organization” perspective, where services belong to a single administrative domain. In embedded contexts, however, products frequently comprise modules supplied by multiple vendors, each exposing proprietary interfaces. This mismatch necessitates explicit contract definition, version management, and formal verification techniques (e.g., Petri nets, TLA+, Alloy) to guarantee safety and compatibility before deployment.
Benefits and Limitations – Empirical evaluations reported in the primary studies demonstrate that choreography can improve performance metrics in embedded systems. By eliminating a central orchestrator and allowing services to interact directly according to a pre‑negotiated choreography, response times improve by 20‑30 % and network traffic is reduced. Power consumption also drops by roughly 10‑15 % due to fewer message exchanges and more efficient event handling. Nevertheless, these gains are contingent on the maturity of modeling languages and tool support; insufficient expressiveness hampers the ability to model complex interactions, leading to manual interventions and potential errors.
The review concludes that choreography in embedded systems differs fundamentally from its enterprise counterpart. It is primarily used to capture intra‑organizational service interactions, whereas enterprise choreography typically models inter‑organizational processes. Moreover, existing choreography languages are not expressive enough to model the intricate timing, resource, and safety constraints of embedded devices. To bridge this gap, the authors recommend three research directions: (1) development of lightweight middleware that respects real‑time and power constraints, (2) creation of domain‑specific modeling languages and automated code‑generation pipelines tailored to embedded platforms, and (3) integration of formal contract management and verification mechanisms to handle multi‑vendor component ecosystems.
For practitioners, the paper offers a decision‑making framework that helps assess whether choreography is suitable for a given embedded project, based on factors such as system complexity, real‑time requirements, and available tooling. For researchers, it highlights the pressing need for expressive, tool‑supported choreography specifications that can be seamlessly transformed into efficient embedded code. By addressing these challenges, the community can unlock the performance and maintainability benefits of choreography for the rapidly expanding field of SOA‑enabled embedded systems.