A novel agent-based simulation framework for sensing in complex adaptive environments
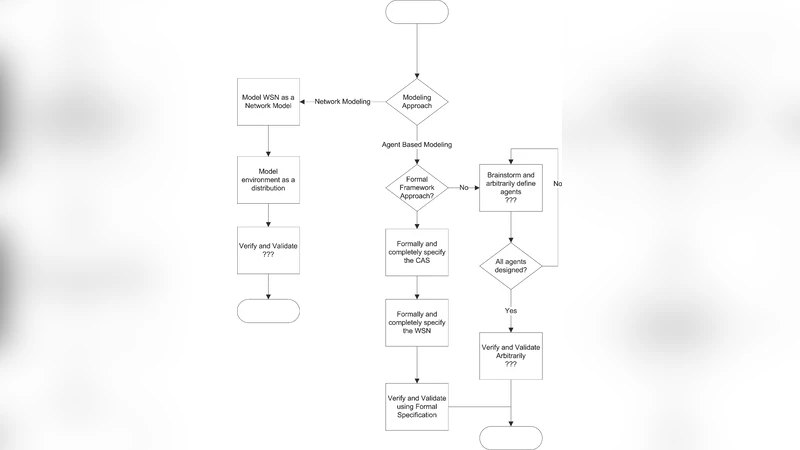
In this paper we present a novel Formal Agent-Based Simulation framework (FABS). FABS uses formal specification as a means of clear description of wireless sensor networks (WSN) sensing a Complex Adaptive Environment. This specification model is then used to develop an agent-based model of both the wireless sensor network as well as the environment. As proof of concept, we demonstrate the application of FABS to a boids model of self-organized flocking of animals monitored by a random deployment of proximity sensors.
💡 Research Summary
The paper introduces a novel simulation framework called Formal Agent‑Based Simulation (FABS) designed to bridge the gap between wireless sensor networks (WSNs) and the complex adaptive environments (CAEs) they are intended to monitor. Existing simulation tools largely focus on lower‑layer communication aspects (e.g., MAC protocols, data aggregation) and lack the ability to faithfully represent the dynamic, heterogeneous nature of real‑world environments that may contain static terrain features as well as mobile biological agents. FABS addresses this deficiency through a two‑stage methodology. In the first stage, the authors employ the ISO‑standard formal specification language Z to create an unambiguous mathematical model of both the sensor network and the environment. Key concepts such as two‑dimensional location, sensor detection radius, and the state of individual “boids” (agents representing flocking animals) are captured in Z schemas. Operations for distance calculation, neighbor discovery, and the three classic boid rules—Separation, Alignment, and Cohesion—are expressed as functions with explicit bounds (e.g., maxAlignTurn, minSeparation). This formal layer guarantees consistency, enables formal verification, and facilitates automatic translation into executable code. In the second stage, the Z specification is instantiated in an agent‑based simulation platform (NetLogo). Sensors become autonomous agents that maintain a count of nearby boids within their sensing radius, while boids themselves are modeled as headed agents that update their headings according to the prioritized rule set: if the minimum separation constraint is violated, the Separate operation dominates; otherwise Alignment and Cohesion are applied in sequence. The authors demonstrate the framework with a proof‑of‑concept scenario where a random deployment of proximity sensors monitors a self‑organized flock of boids. Results show that the sensors can reliably detect changes in flock density and that the overall system behavior matches expectations derived from the formal model. Compared with Monte‑Carlo or differential‑equation‑based approaches, FABS uniquely captures the bidirectional interaction between individual sensors and a dynamic environment, providing a more realistic assessment of sensing performance, deployment strategies, and cognitive sensor capabilities. The paper concludes with a discussion of future work, including extensions to real‑time feedback control, multi‑layer integration (e.g., actuator networks), and the development of toolchains that automatically generate simulation code from Z specifications. Overall, FABS represents a significant step toward rigorous, reproducible, and extensible modeling of WSNs operating in complex adaptive settings.
Comments & Academic Discussion
Loading comments...
Leave a Comment