Geometric Embedding of Path and Cycle Graphs in Pseudo-convex Polygons
Given a graph $ G $ with $ n $ vertices and a set $ S $ of $ n $ points in the plane, a point-set embedding of $ G $ on $ S $ is a planar drawing such that each vertex of $ G $ is mapped to a distinct point of $ S $. A straight-line point-set embedding is a point-set embedding with no edge bends or curves. The point-set embeddability problem is NP-complete, even when $ G $ is $ 2 $-connected and $ 2 $-outerplanar. It has been solved polynomially only for a few classes of planar graphs. Suppose that $ S $ is the set of vertices of a simple polygon. A straight-line polygon embedding of a graph is a straight-line point-set embedding of the graph onto the vertices of the polygon with no crossing between edges of graph and the edges of polygon. In this paper, we present $ O(n) $-time algorithms for polygon embedding of path and cycle graphs in simple convex polygon and same time algorithms for polygon embedding of path and cycle graphs in a large type of simple polygons where $n$ is the number of vertices of the polygon.
💡 Research Summary
The paper addresses a specialized version of the point‑set embedding problem in which the set of points is exactly the vertex set of a simple polygon. While the general point‑set embedding problem is NP‑complete and known to require at least Ω(n log n) time because a sorting step is unavoidable, the authors exploit the inherent ordering of polygon vertices to achieve linear‑time solutions for two fundamental graph families: paths and cycles.
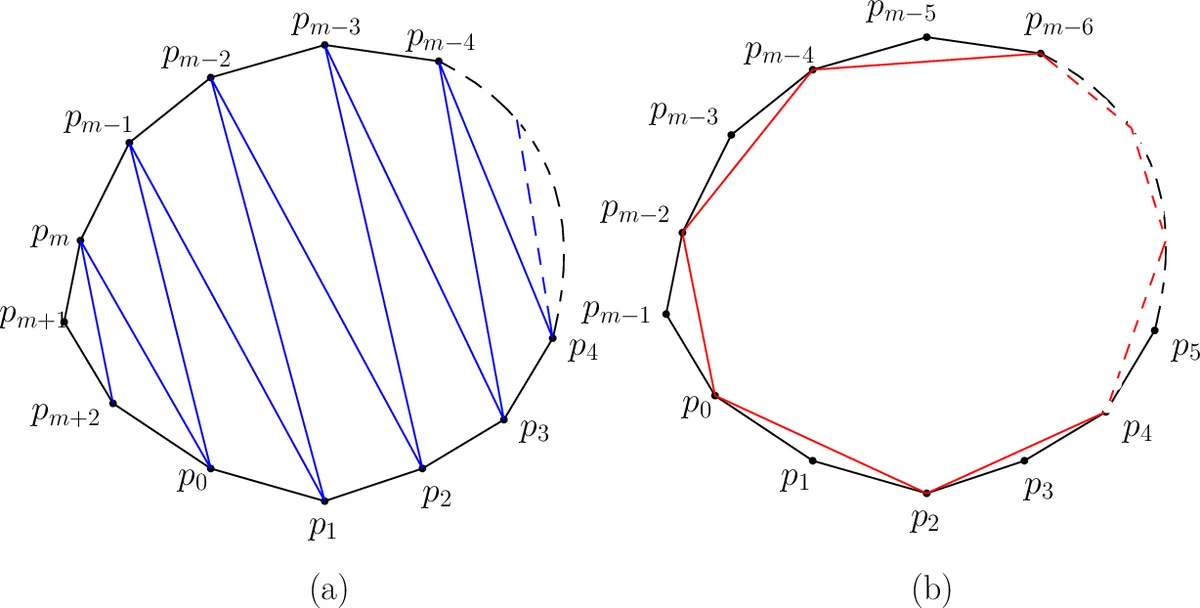
First, for a convex polygon with n vertices, they show that any path Pₘ with m ≤ n − 3 can be embedded as a set of non‑crossing chords. The algorithm (Lemma 1) simply walks from one end of the vertex list toward the centre, selecting chords that connect symmetric vertices; because every pair of vertices in a convex polygon is mutually visible, each chosen chord lies entirely inside the polygon and never intersects another. The traversal requires only a constant number of index updates per edge, yielding Θ(m) = Θ(n) time.
Second, they treat cycles. In a convex polygon, a cycle of size ⌊n/2⌋ can be drawn by connecting every second vertex (even‑indexed vertices) and finally closing the loop (Lemma 2). Again, convexity guarantees that all these chords are interior and non‑intersecting, and the construction runs in linear time.
The authors then extend the approach to a broader class they call “pseudo‑convex” polygons—polygons that may contain reflex vertices but still possess large convex runs where vertices are mutually visible. By decomposing the polygon into maximal convex runs, the same chord‑selection strategy can be applied within each run, while chords that would cross a reflex region are simply omitted. This yields an O(n) algorithm for embedding the maximum‑size path or cycle that fits within the visibility constraints of the pseudo‑convex shape.
Beyond algorithmic constructions, the paper derives theoretical bounds on how large an embeddable path or cycle can be. In any simple polygon, a planar embedding of a path cannot use more than n − 3 vertices, because each edge must be a chord and a polygon has at most n − 3 non‑adjacent chords without crossing. For cycles, the upper bound is ⌊n/2⌋, which follows from the observation that each pair of consecutive cycle vertices must be separated by at least one unused polygon vertex to avoid forcing an edge to coincide with a polygon side. These bounds are tight for convex polygons, as demonstrated by the constructive algorithms.
The paper also discusses lower bounds on computational complexity. Since the input already provides a total order of vertices, the sorting step required in generic point‑set embedding is unnecessary, reducing the lower bound from Ω(n log n) to Ω(n). Consequently, the presented linear‑time algorithms are asymptotically optimal.
In terms of practical impact, the algorithms are extremely simple: they consist of a few index manipulations and do not require additional data structures beyond the vertex list, leading to O(1) extra space. This simplicity makes the methods attractive for applications such as circuit layout, network visualization, or any domain where a planar graph must be drawn on a pre‑defined set of anchor points that form a polygonal boundary.
Overall, the contribution of the paper lies in (1) identifying a natural restriction of the point‑set embedding problem where the input ordering can be leveraged, (2) providing optimal linear‑time algorithms for embedding paths and cycles in both convex and a large class of pseudo‑convex polygons, and (3) establishing tight combinatorial limits on the size of embeddable subgraphs. These results enrich the theoretical understanding of geometric graph embedding and open avenues for further exploration of other graph families under similar polygon‑based constraints.
Comments & Academic Discussion
Loading comments...
Leave a Comment