Object-based high contrast travel time tomography
We consider travel time tomography problems involving detection of high contrast, discrete high velocity structures. This results in a discrete nonlinear inverse problem, for which traditional grid-based models and iterative linearized least-squares reconstruction algorithms are not suitable. This is because travel paths change significantly near the high contrast velocity structure, making it more difficult to inversely calculate the travel path and infer the velocity along the path. We propose a model-based approach to describe the high velocity structure using pre-defined elementary objects. Compared to a grid-based model, our approach has complexity that increases as a function of the number of objects, rather than increasing with the number of cells (usually very large). A new reconstruction algorithm is developed that provides estimates of the probability that a high velocity structure appears at any point in the region of interest. Simulation results show that our method can efficiently sample the model parameter space, and we map the model parameters into the high velocity structures in spatial domain to generate a “probability map”, which represent the appearance of the high velocity structure in different regions. We show the probability map not only gives the highest probability to the optimal solution, but also includes other possible models as well.
💡 Research Summary
The paper addresses the challenging problem of detecting high‑contrast, high‑velocity structures (HVS) in a homogeneous background using travel‑time tomography. Conventional grid‑based approaches suffer from two major drawbacks in this setting: (1) the number of unknowns grows with the number of cells, leading to a high‑dimensional inverse problem, and (2) the presence of strong velocity contrasts causes ray bending, invalidating the straight‑ray assumption that underlies many linearized reconstruction algorithms. When data are sparse, these issues result in poor convergence, severe non‑uniqueness, and “lack of ray coverage” at cell locations that are not intersected by any ray.
To overcome these limitations, the authors propose an object‑based model. Instead of assigning a velocity to each grid cell, the medium is represented by a set of pre‑defined convex objects (e.g., ellipses, rectangles, prisms). Each object is described by a small vector of parameters (type, center, orientation, size, etc.). Overlapping objects are allowed; the velocity at any point is taken as the maximum of the velocities of all objects covering that point, which naturally captures the dominance of high‑velocity zones. Consequently, the dimensionality of the unknown parameter space is proportional to the number of objects N, not to the number of cells, dramatically reducing the size of the inverse problem.
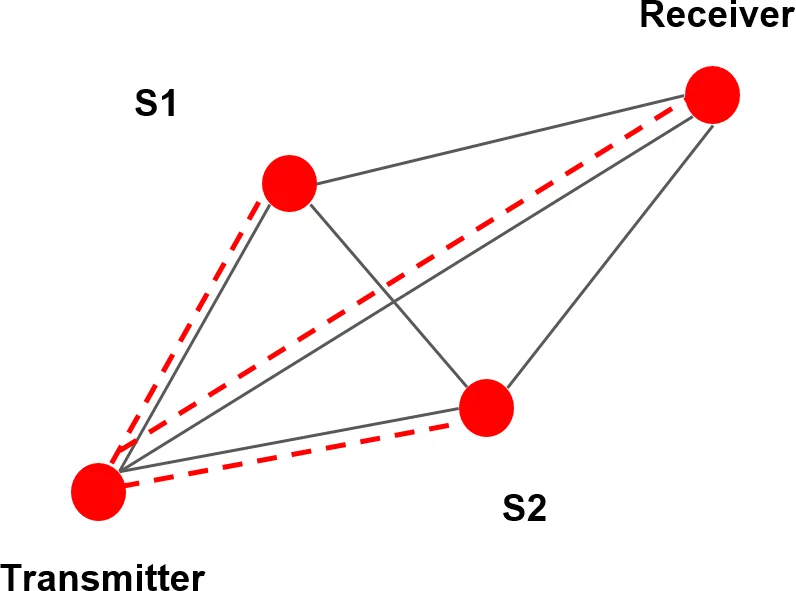
A key physical assumption is that the velocity inside each high‑velocity object is much larger than the background velocity (v_i ≫ v_h). Under this high‑contrast condition, the travel time spent inside an object can be neglected. Therefore, the optimal travel path between a source and a receiver consists of straight‑line segments that connect the source to the nearest point on an object, travel across the object (with negligible time), and then connect the object to the receiver. For multiple objects, the optimal path is the shortest concatenation of such segments, which can be expressed using pairwise distances d(θ_i,θ_j) = min_{μ∈|θ_i|, ν∈|θ_j|}‖μ−ν‖. The travel‑time functional reduces to a simple piecewise linear expression: τ* = min{ (1/v_h)·d(source,receiver), (1/v_h)·
Comments & Academic Discussion
Loading comments...
Leave a Comment