Track selection in Multifunction Radars: Nash and correlated equilibria
We consider a track selection problem for multi-target tracking in a multifunction radar network from a game-theoretic perspective. The problem is formulated as a non-cooperative game. The radars are considered to be players in this game with utilities modeled using a proper tracking accuracy criterion and their strategies are the observed targets whose number is known. Initially, for the problem of coordination, the Nash equilibria are characterized and, in order to find equilibria points, a distributed algorithm based on the best-response dynamics is proposed. Afterwards, the analysis is extended to the case of partial target observability and radar connectivity and heterogeneous interests among radars. The solution concept of correlated equilibria is employed and a distributed algorithm based on the regret-matching is proposed. The proposed algorithms are shown to perform well compared to the centralized approach of significantly higher complexity.
💡 Research Summary
This paper addresses the problem of allocating limited tracking resources among multiple targets in a network of multifunction radars (MFRs). Each radar can make only a few measurements per scan, yet the network must collectively track all targets with high accuracy. The authors formulate the situation as a non‑cooperative normal‑form game: the radars are the players, a radar’s strategy is the set of targets it chooses to illuminate (subject to a per‑radar budget), and the utility of a radar is a tracking‑accuracy metric derived from the reduction in the Extended Kalman Filter (EKF) error covariance that results from its measurements.
Two distinct operational scenarios are examined.
Scenario 1 – Full observability and full connectivity.
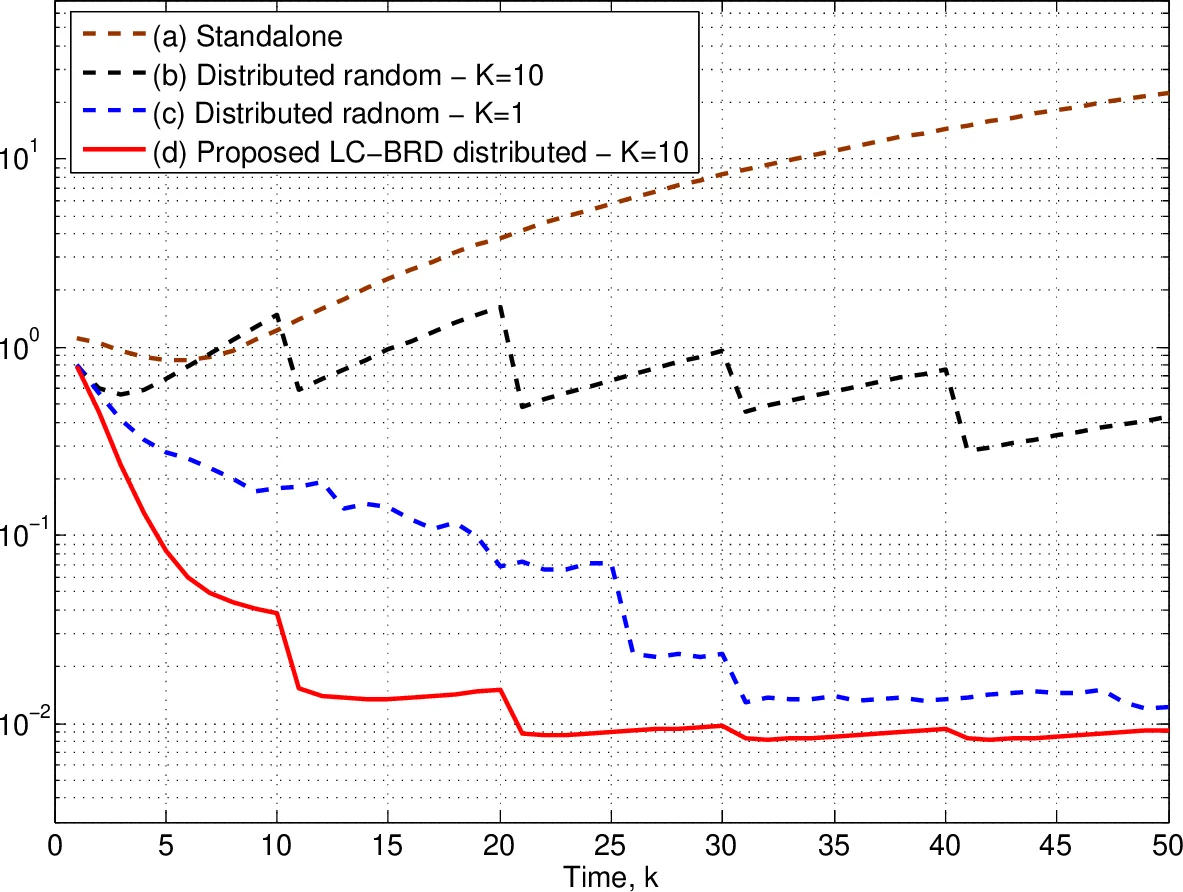
All radars can see every target and can exchange measurement data with every other radar. Under these symmetric conditions the game becomes a coordination game. The authors prove that pure‑strategy Nash equilibria (NE) exist and that equilibria in which each target receives roughly the same number of measurements are Pareto‑efficient and achieve a price of anarchy close to one. To reach such equilibria in a distributed fashion, a best‑response dynamics algorithm is proposed: each radar repeatedly observes the current selections of its peers, computes the best set of targets for itself (maximising its own utility), and updates its choice. The algorithm converges quickly, requires only local information exchange, and has computational complexity O(T·m) per radar per iteration (T = number of targets, m = measurement budget).
Scenario 2 – Partial observability, heterogeneous interests, and limited connectivity.
Here radars may see only subsets of the targets, and different targets may have different priorities for different radars. The asymmetry makes pure‑strategy NE insufficient for efficient resource allocation. Consequently, the authors adopt the more general solution concept of Correlated Equilibrium (CE). In a CE a “referee” draws a joint action profile from a probability distribution and privately recommends each radar’s action; no radar can improve its expected utility by deviating from the recommendation. To achieve CE without a central coordinator, a regret‑matching learning algorithm is employed. Each radar keeps track of the regret associated with not having played alternative actions in the past; it then probabilistically selects actions proportionally to accumulated regret. This process requires only the exchange of scalar regret values with neighboring radars and converges to the set of CE. The algorithm’s per‑iteration complexity is O(T).
The paper provides extensive simulation results for networks with five radars and eight targets under various connectivity and observability patterns. Performance metrics include average tracking error, distribution of measurements per target, total social welfare (sum of utilities), price of anarchy, and convergence speed. Findings show that:
- The best‑response NE algorithm attains social welfare virtually identical to that of a centralized integer linear programming solution, while converging in roughly a dozen iterations.
- The regret‑matching CE algorithm maintains high social welfare even when target priorities differ dramatically among radars, converging within 20–30 iterations.
- Both distributed methods reduce computational time by an order of magnitude compared with the centralized optimum, and require only modest communication overhead.
In conclusion, the authors demonstrate that game‑theoretic modeling, combined with appropriate equilibrium concepts (Nash for symmetric settings, Correlated for asymmetric ones), yields low‑complexity distributed algorithms that achieve near‑optimal tracking performance in multifunction radar networks. The work opens avenues for future research on dynamic target numbers, non‑linear measurement models, and integration with reinforcement‑learning based adaptation.
Comments & Academic Discussion
Loading comments...
Leave a Comment