Finding maxmin allocations in cooperative and competitive fair division
We consider upper and lower bounds for maxmin allocations of a completely divisible good in both competitive and cooperative strategic contexts. We then derive a subgradient algorithm to compute the exact value up to any fixed degree of precision.
💡 Research Summary
The paper studies the problem of fairly dividing a completely divisible good (often metaphorically called a “cake”) among a finite set of agents, focusing on the max‑min (or Rawlsian) allocation criterion. Two strategic contexts are examined: a purely competitive setting in which each agent acts independently, and a cooperative setting in which agents may form mutually exclusive coalitions before the division takes place.
In the competitive model each agent i receives a piece A_i of the cake and derives utility μ_i(A_i). The max‑min allocation is defined as the partition (A*_1,…,A*n) that maximizes the minimal utility across agents, i.e. v_m = max{(A_1,…,A_n)∈Π_n} min_i μ_i(A_i). Under the standard assumptions of complete divisibility (CD) and mutual absolute continuity (MAC) the optimal partition exists, is equitable (all agents obtain the same utility) and coincides with the Kalai‑Smorodinsky bargaining solution.
The cooperative model introduces a coalition structure Γ = {S_1,…,S_m}, where each coalition S_j aggregates the preferences of its members by taking the pointwise maximum of their density functions: f_{S_j}(x)=max_{i∈S_j} f_i(x). The coalition’s joint utility for a measurable set B is μ_{S_j}(B)=∫B f{S_j}(x)dx. A weight function w:2^N→ℝ_+ assigns an importance to each coalition (e.g., cardinality or the utility that the coalition would obtain in the competitive equilibrium). The coalition game is then defined by η(S,w)=w(S)·v(Γ_S,w), where Γ_S replaces the rest of the agents by singletons. The cooperative max‑min value is v(Γ,w)=max_{(B_1,…,B_m)∈Π_m} min_{j} μ_{S_j}(B_j)/w(S_j).
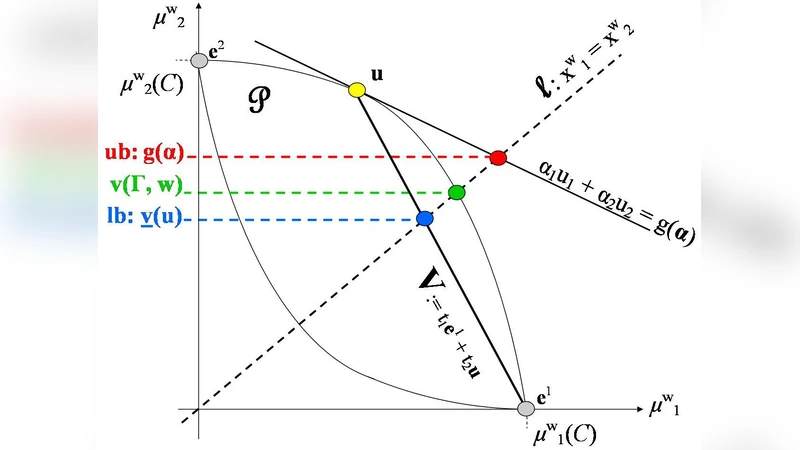
A geometric representation is employed: the “partition range” (also called the Individual Pieces Set, IPS) P = { (μ_{w_1}(B_1),…,μ_{w_m}(B_m)) : (B_1,…,B_m)∈Π_m } ⊂ ℝ^m_+. Under CD the set P is compact and convex. The max‑min value v(Γ,w) is the largest scalar x such that the egalitarian line ℓ = { (x,…,x) } lies inside P; equivalently it is the intersection of ℓ with the Pareto frontier of P.
Upper bounds are obtained by solving a weighted max‑sum problem. For any weight vector α in the (m‑1)-simplex Δ_{m‑1}, define g(α)=∫C max_j {α_j f{w_j}(x)}dx. The partition B^α that satisfies α_k f_{w_k}(x) ≥ α_h f_{w_h}(x) on each of its pieces maximizes Σ_j α_j μ_{w_j}(B_j). The value g(α) is an upper bound on v(Γ,w) and, crucially, g is convex with v(Γ,w)=min_{α∈Δ} g(α).
Lower bounds are derived from “partition value vectors” (PVVs) u^α = (μ_{w_1}(B^α_1),…,μ_{w_m}(B^α_m)). By taking convex combinations of a PVV u and the m−1 vectors e^q that place the total coalition utility μ_{w_q}(C) in a single coordinate, one constructs a convex hull V. The intersection of V with the egalitarian line yields a lower bound v(u) = u_h + Σ_{j≠h} (u_h−u_j) μ_{w_j}(C), where u_h is the largest component of u. This bound is always at least the minimum component of u.
Because g is generally non‑differentiable, the authors adopt Shor’s subgradient method, specifically its projected variant to respect the simplex constraints. Starting from an initial α^0∈Δ, the iteration α^{k+1}=Π_Δ(α^k − t_k s_k) uses a subgradient s_k∈∂g(α^k) and a diminishing step size t_k satisfying Σ t_k = ∞, Σ t_k^2 < ∞. Standard convergence results guarantee that g(α^k) converges to the optimal value v(Γ,w), and consequently the upper and lower bounds converge to the same limit.
The paper concludes with two numerical experiments. In the first, agents are grouped into two coalitions of sizes three and two; in the second, all four agents form a single coalition. For each case the algorithm computes the optimal α, the corresponding partition, and the Shapley values of the coalition game η(·,w). The results illustrate how the Shapley allocation reflects both coalition size and the chosen weight scheme (cardinality vs. pre‑allocation weight), and they confirm the rapid convergence of the subgradient procedure to high‑precision estimates of v(Γ,w).
Overall, the contribution lies in (i) unifying competitive and cooperative max‑min fair division under a common convex‑geometric framework, (ii) providing computable upper and lower bounds via weighted max‑sum partitions and PVVs, (iii) designing a practical subgradient algorithm that yields the exact max‑min value to any prescribed precision, and (iv) linking the division problem to cooperative game theory through Shapley value analysis. This bridges a gap between existence results in fair division literature and algorithmic tools needed for real‑world applications.
Comments & Academic Discussion
Loading comments...
Leave a Comment