Approximation Schemes for Independent Set and Sparse Subsets of Polygons
We present an $(1+\varepsilon)$-approximation algorithm with quasi-polynomial running time for computing the maximum weight independent set of polygons out of a given set of polygons in the plane (specifically, the running time is $n^{O( \mathrm{poly}( \log n, 1/\varepsilon))}$). Contrasting this, the best known polynomial time algorithm for the problem has an approximation ratio of~$n^{\varepsilon}$. Surprisingly, we can extend the algorithm to the problem of computing the maximum weight subset of the given set of polygons whose intersection graph fulfills some sparsity condition. For example, we show that one can approximate the maximum weight subset of polygons, such that the intersection graph of the subset is planar or does not contain a cycle of length $4$ (i.e., $K_{2,2}$). Our algorithm relies on a recursive partitioning scheme, whose backbone is the existence of balanced cuts with small complexity that intersect polygons from the optimal solution of a small total weight. For the case of large axis-parallel rectangles, we provide a polynomial time $(1+\varepsilon)$-approximation for the maximum weight independent set. Specifically, we consider the problem where each rectangle has one edge whose length is at least a constant fraction of the length of the corresponding edge of the bounding box of all the input elements. This is now the most general case for which a PTAS is known, and it requires a new and involved partitioning scheme, which should be of independent interest.
💡 Research Summary
The paper addresses the classic geometric optimization problem of finding a maximum‑weight independent set of polygons in the plane. While polynomial‑time algorithms with poly‑logarithmic approximation factors are known for special cases (e.g., fat objects, disks, squares), the general problem for arbitrary simple polygons—or even for axis‑parallel rectangles—has resisted any constant‑factor approximation in polynomial time. The authors close this gap by presenting two major results.
First, they develop a quasi‑polynomial time approximation scheme (QPTAS) that, for any ε > 0, computes a (1 + ε)‑approximate solution. The running time is n^{O(poly(log n, 1/ε))}, where n is the total number of vertices of all input polygons. The core technical contribution is the notion of a “cheap balanced cut”. For any optimal solution O, there exists a geometric separator that intersects only an ε/ log m fraction of the total weight of O, and the separator can be described using O(poly(log m, 1/ε)) bits. To construct such a separator the authors first build weighted 1/r‑cuttings of size O(r log r) using a weighted version of the exponential‑decay lemma, then apply the planar separator theorem to the dual planar graph induced by the cutting. Because the number of possible separators is quasi‑polynomial, the algorithm can enumerate all candidates, discard the polygons intersected by the chosen separator (losing at most ε·OPT weight), and recurse on the two sides. The recursion depth is O(log m), yielding the claimed quasi‑polynomial running time.
Second, the authors extend the QPTAS framework to a broader class of “sparse” subsets. Instead of requiring the selected polygons to be pairwise non‑intersecting, they allow intersection graphs that satisfy certain sparsity conditions—planarity, exclusion of a fixed bipartite subgraph K_{s,t}, or a sub‑quadratic number of edges. Under the additional assumption that any two polygons intersect only a constant number of times, the same cheap‑cut technique yields a QPTAS for these relaxed problems.
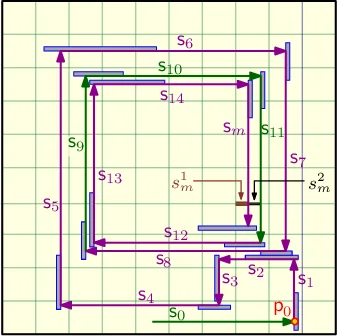
Finally, for the important special case of axis‑parallel rectangles where each rectangle has at least one side of length at least a constant fraction δ of the corresponding side of the global bounding box (δ‑large rectangles), the authors devise a true polynomial‑time approximation scheme (PTAS). Their approach uses a two‑level partition: the first level partitions the plane into a constant number of “large rectangles” and a constant number of narrow “corridors”. The second level recursively decomposes each corridor into sub‑polygons that are amenable to dynamic programming. Because the number of possible first‑level partitions is polynomial, the algorithm can try all of them; the DP on corridors runs in polynomial time, and the overall loss is bounded by ε·OPT. This PTAS is the most general known for rectangle independent set and introduces a novel corridor‑based decomposition that may be useful for other geometric packing problems.
The paper is organized as follows. Section 2 presents the QPTAS for independent sets, including weight normalization and the high‑level recursion. Section 3 develops the geometric tools: canonical decompositions, weighted cuttings, and the exponential‑decay lemma. Section 4 extends the technique to sparse intersection graphs. Section 5 describes the PTAS for δ‑large rectangles, detailing the corridor construction and the DP formulation. The authors conclude with a discussion of impact, noting that cheap balanced cuts have already been employed in subsequent works on geometric set cover, knapsack, strip‑packing, and facility location, while the corridor decomposition has inspired advances in two‑dimensional knapsack and related packing problems. Overall, the work provides a breakthrough in the approximability of geometric independent set problems, showing that quasi‑polynomial time suffices for (1 + ε) approximation and that polynomial‑time PTAS is achievable for a substantial subclass of rectangle instances.
Comments & Academic Discussion
Loading comments...
Leave a Comment