Impact of centrality on cooperative processes
The solution of today’s complex problems requires the grouping of task forces whose members are usually connected remotely over long physical distances and different time zones. Hence, understanding the effects of imposed communication patterns (i.e., who can communicate with whom) on group performance is important. Here, we use an agent-based model to explore the influence of the betweenness centrality of the nodes on the time the group requires to find the global maxima of NK-fitness landscapes. The agents cooperate by broadcasting messages, informing on their fitness to their neighbors, and use this information to copy the more successful agents in their neighborhood. We find that for easy tasks (smooth landscapes), the topology of the communication network has no effect on the performance of the group, and that the more central nodes are the most likely to find the global maximum first. For difficult tasks (rugged landscapes), however, we find a positive correlation between the variance of the betweenness among the network nodes and the group performance. For these tasks, the performances of individual nodes are strongly influenced by the agents dispositions to cooperate and by the particular realizations of the rugged landscapes.
💡 Research Summary
The paper investigates how the betweenness centrality of nodes in a fixed communication network influences the performance of a cooperative problem‑solving group. The authors use an agent‑based model where 16 agents are placed on a network of degree three (each node has exactly three neighbors). Four distinct network topologies are examined:
- Network A – maximizes both the highest betweenness value and the variance of betweenness across nodes (a hierarchical structure with a single central hub and modular periphery).
- Network B – maximizes the average betweenness (a more egalitarian, highly connected pattern).
- Network C – a typical random network whose average betweenness matches the mean of a large random sample.
- Network D – minimizes both the maximum betweenness and its variance (a perfectly regular graph where every node has identical betweenness).
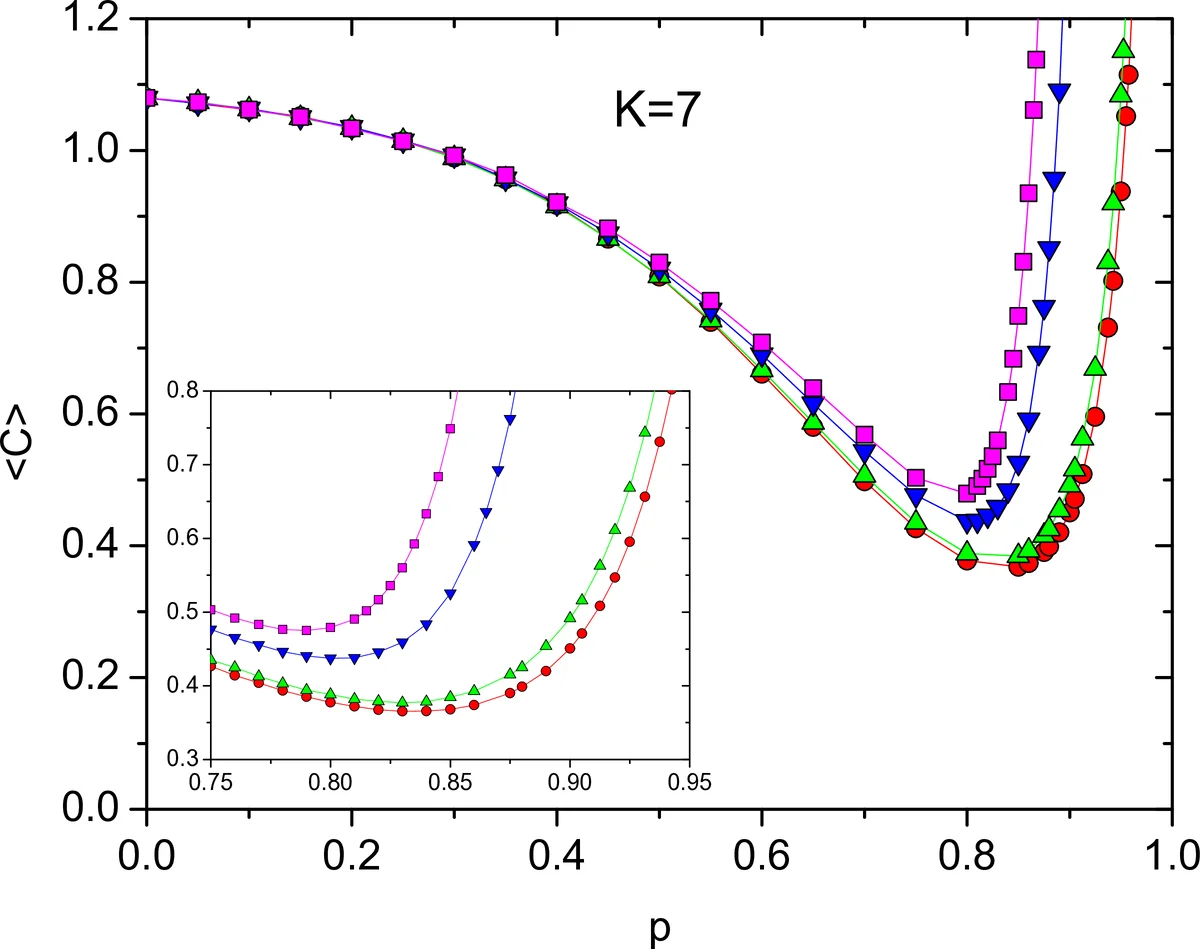
The task assigned to the agents is to locate the unique global maximum of an NK‑fitness landscape. The NK model uses binary strings of length N = 16, allowing the authors to control landscape ruggedness through the epistasis parameter K. Three values are considered: K = 0 (smooth landscape with a single peak), K = 3 (moderately rugged), and K = 7 (highly rugged with many local maxima). For each (N, K) pair, 100 landscape realizations are generated and stored, ensuring that all four network topologies are tested on identical problem instances.
Agent dynamics are governed by two stochastic processes. With probability p (the “copy propensity”), an agent selects the most fit neighbor (the “model” agent) within its fixed communication neighborhood, compares its own binary string to the model, and flips one randomly chosen differing bit, thereby moving incrementally toward the model. If the agent already matches the model, it flips a random bit anyway. With probability 1 − p, the agent performs a pure exploratory move: it flips a randomly chosen bit regardless of fitness. Time advances in steps of Δt = 1/L, so that after each unit of time exactly L updates have occurred (though some agents may be updated multiple times). The search terminates when any agent discovers the global optimum; the halting time t* is recorded, and the computational cost is defined as C = L t*/2^N, i.e., the number of elementary operations normalized by the size of the search space.
The authors run 10^4–10^5 independent searches for each landscape, averaging results over the 100 landscapes per K value. Their findings can be summarized as follows:
-
Smooth Landscapes (K = 0).
- The overall group performance (average cost C) is essentially independent of the network topology. Whether the network is hierarchical, egalitarian, random, or regular makes no measurable difference.
- Nevertheless, the probability that a particular node discovers the optimum first is strongly positively correlated with its betweenness centrality. Nodes occupying central positions in the communication graph are far more likely to be the first to locate the global maximum. This reflects the fact that central nodes are more frequently selected as models during the copying phase, giving them a systematic informational advantage.
-
Rugged Landscapes (K > 0, especially K = 7).
- Network structure now matters dramatically. The hierarchy‑rich Network A, which exhibits the largest betweenness variance, yields the lowest average computational cost. Conversely, the perfectly regular Network D, with minimal betweenness variance, performs worst.
- The authors interpret this as a consequence of “misleading information.” In rugged landscapes, fitness signals often point toward local maxima rather than the global optimum. When betweenness is uniformly high (as in Network B), erroneous fitness cues spread quickly throughout the group, causing many agents to converge prematurely on suboptimal peaks. A heterogeneous betweenness distribution, by contrast, slows down the diffusion of such misleading cues; central nodes still tend to hold higher‑quality information, while peripheral nodes explore more independently, preserving diversity and increasing the chance of escaping local traps.
-
Effect of the Copy Propensity p.
- At p ≈ 0, agents act independently; the chance of any node finding the optimum is essentially uniform, regardless of network position.
- At intermediate p values (the region that minimizes the average cost), central nodes enjoy a distinct advantage: they are more often the model agents and thus guide the group more effectively.
- At p ≈ 1, the system becomes overly exploitative; all agents repeatedly copy the same model, leading to rapid homogenization. In rugged landscapes this homogenization is detrimental because the group can become locked into a local maximum. In this regime peripheral nodes may paradoxically have a higher chance of stumbling upon the global optimum simply because they retain more independent exploration.
-
Average Path Length (ℓ̄) and “Efficiency.”
- Networks A and B have relatively long average shortest‑path lengths and are labeled “inefficient,” whereas Networks C and D are “efficient” with short ℓ̄.
- Counter‑intuitively, the “inefficient” networks outperform the “efficient” ones on rugged landscapes. The longer paths introduce a temporal delay in information propagation, which mitigates the spread of misleading fitness signals and preserves exploratory diversity. Efficient networks, by contrast, disseminate information too quickly, amplifying the impact of false cues.
Overall, the study demonstrates that the optimal communication topology depends on both task difficulty and the agents’ propensity to copy. For easy, smooth problems, centrality simply determines which individual will solve the problem first, but the group as a whole is indifferent to network shape. For hard, rugged problems, a heterogeneous betweenness distribution—i.e., a network where some nodes are highly central while others are peripheral—maximizes group performance. The authors argue that these insights are relevant not only for human organizations but also for distributed computational systems such as swarm robotics, peer‑to‑peer networks, and cloud‑based collaborative platforms. Designing communication architectures that deliberately balance information concentration (to exploit high‑quality signals) with sufficient diffusion delay (to avoid premature convergence) could therefore improve the efficiency of collective problem solving in a wide range of real‑world settings.
Comments & Academic Discussion
Loading comments...
Leave a Comment