Counting Euclidean embeddings of rigid graphs
A graph is called (generically) rigid in $\mathbb{R}^d$ if, for any choice of sufficiently generic edge lengths, it can be embedded in $\mathbb{R}^d$ in a finite number of distinct ways, modulo rigid transformations. Here we deal with the problem of determining the maximum number of planar Euclidean embeddings as a function of the number of the vertices. We obtain polynomial systems which totally capture the structure of a given graph, by exploiting distance geometry theory. Consequently, counting the number of Euclidean embeddings of a given rigid graph, reduces to the problem of counting roots of the corresponding polynomial system.
💡 Research Summary
The paper addresses the fundamental problem of determining how many distinct Euclidean embeddings a minimally rigid (Laman) graph can have in the plane, up to rigid motions (translations, rotations, and reflections). A graph G=(V,E) with generic edge lengths d_{ij}>0 is said to be rigid in ℝ² if the system of distance constraints ‖p_i−p_j‖=d_{ij} admits only a finite number of solutions modulo the Euclidean group. The authors focus on the maximal number of such embeddings as a function of the number of vertices n.
The theoretical backbone is distance geometry. For a graph with n vertices they construct the pre‑distance matrix D (with entries d_{ij}²) and the associated Cayley‑Menger matrix B, an (n+1)×(n+1) symmetric matrix whose first row and column consist of ones and whose remaining entries are the squared distances. A necessary and sufficient condition for the existence of a realization in ℝ^d is that (i) rank(B)≤d+2 and (ii) all principal minors of B satisfy the Cayley‑Menger sign conditions (which encode positivity of distances, triangle inequalities, etc.). In the planar case (d=2) the rank condition forces all 5×5 minors to vanish. By selecting a subset of these minors the authors obtain a square polynomial system whose solutions correspond exactly to Euclidean Distance Matrix completions of B, i.e., to embeddings of the graph.
The polynomial system is expressed as f₁=…=f_n=0 in n variables with fixed supports. The mixed volume of the Newton polytopes of the f_i provides an upper bound on the number of isolated complex solutions (Bernstein’s theorem). Since each complex solution yields at most two real embeddings (one being the mirror image), multiplying the mixed volume by 2 gives an upper bound on the number of Euclidean embeddings modulo rigid motions.
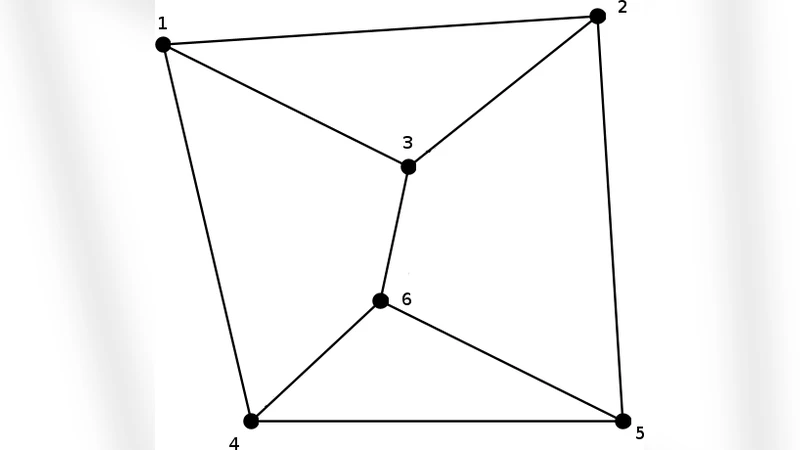
The authors apply this framework to several concrete families. For the Desargues graph (n=6) they extract a 3×3 subsystem whose mixed volume is 12, leading to at most 24 planar embeddings (the known exact number). For the complete bipartite graph K_{3,3} they obtain a mixed volume of 11, giving an upper bound of 22 embeddings.
When n=7, they revisit earlier work that claimed an upper bound of 56 embeddings. By analyzing all Laman graphs with seven vertices, they identify three Henneberg‑2 (H2) graphs; the remaining graphs are built solely with Henneberg‑1 (H1) steps, each of which doubles the number of embeddings. For the worst H2 case they construct a 4×4 subsystem with mixed volume 28, which after accounting for reflections yields exactly 56 embeddings, confirming the earlier bound.
The case n=8 is more subtle. Previous literature (
Comments & Academic Discussion
Loading comments...
Leave a Comment