Marine magnetic anomalies of the tiny wiggles (TW) type can be used to solve geohistorical and paleomagnetic problems. The model fields corresponding to Paleocene-Eocene anomalies in the northwestern Indian Ocean, which were formed during the fasts preading stage, were studied. For these fields, widely used interpretation methods were compared. The testing was performed with first the classical block model and then more complex models reflecting actual processes of oceanic accretion and magnetic field variations in the past. Spectral and statistical methods are used to estimate the magnetic anomalies(MA) resolving. Preprocessing of a set profiles based on the maximal correlation is considered.
Deep Dive into Some remarks on resolving and interpretation of the short marine magnetic anomalies.
Marine magnetic anomalies of the tiny wiggles (TW) type can be used to solve geohistorical and paleomagnetic problems. The model fields corresponding to Paleocene-Eocene anomalies in the northwestern Indian Ocean, which were formed during the fasts preading stage, were studied. For these fields, widely used interpretation methods were compared. The testing was performed with first the classical block model and then more complex models reflecting actual processes of oceanic accretion and magnetic field variations in the past. Spectral and statistical methods are used to estimate the magnetic anomalies(MA) resolving. Preprocessing of a set profiles based on the maximal correlation is considered.
Progress in studying the timescale fine structure isprimarily related to studies of MA at fastspreading centers, where linear anomalies with smallamplitudes (25-100 nT) and short periods weredetected among typical largeamplitude anomalies (Blakely and Cox, 1971;Emilia and Heinrichs, 1972;Cande and LaBrecque, 1974;Bouligand et al., 2006).These anomalies, called tiny wiggles in (LaBrecqueetal., 1977), are studied and discussed because it hasnot yet been determined whether these anomalies represent unknown short polarity chrons or correspond topaleomagnetic field intensity fluctuations. The unknownorigin of TW MAresulted in theappearance of the cryptochron special term in magnetostratigraphy, which is used to denote globallymapped geomagnetic singularities shorter than 30 kyr (Cande andKent, 1992a, 1992b). In addition to thepaleomagnetic aspect of studies, TWtype anomaliescan be used to specify a spreading rate variation.Therefore, it becomes more important to determine amethod that can be used to study anomalies, the possible errors in information about variations in the ancient magnetic field.
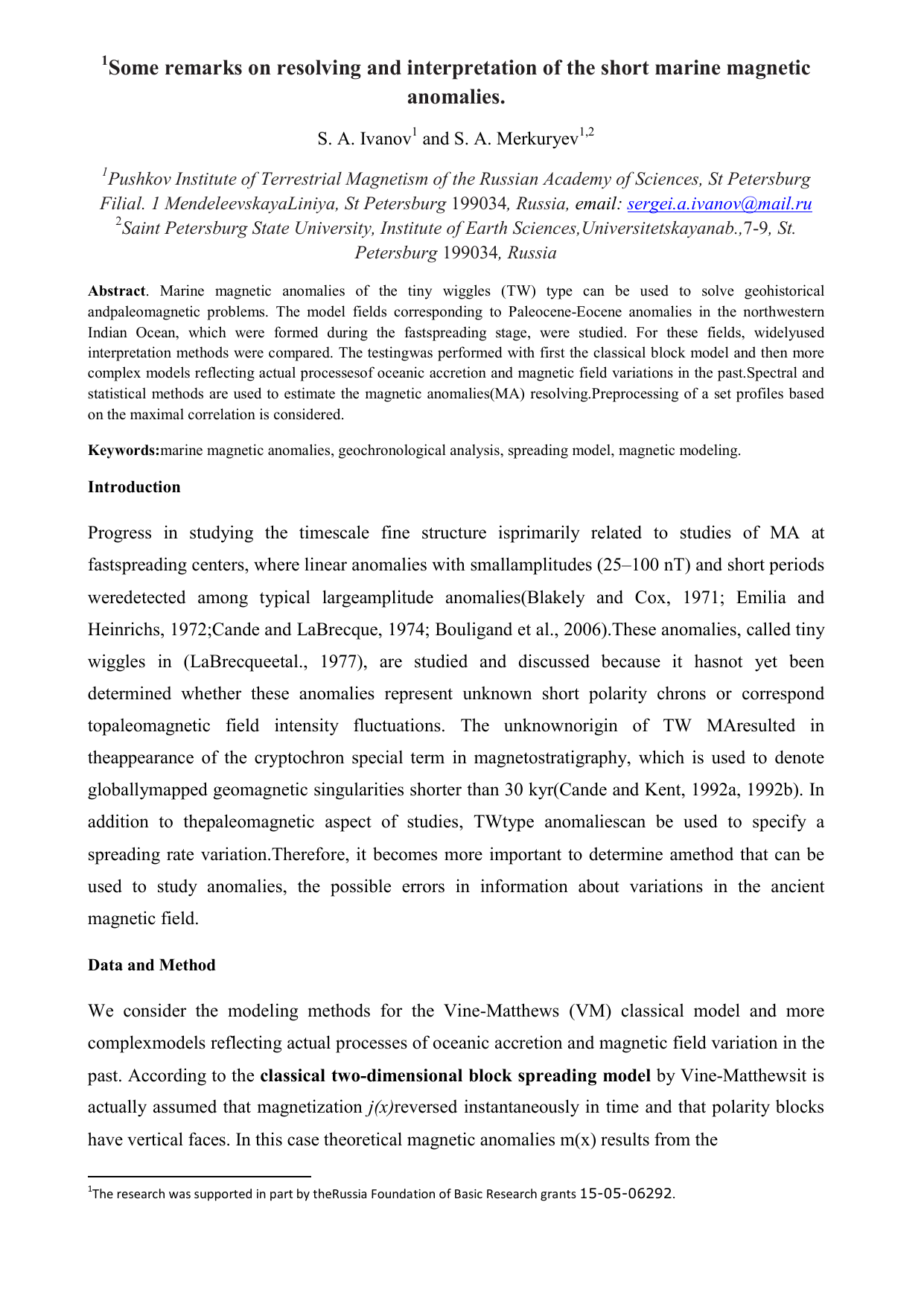
We consider the modeling methods for the Vine-Matthews (VM) classical model and more complexmodels reflecting actual processes of oceanic accretion and magnetic field variation in the past. According to the classical two-dimensional block spreading model by Vine-Matthewsit is actually assumed that magnetization j(x)reversed instantaneously in time and that polarity blocks have vertical faces. In this case theoretical magnetic anomalies m(x) results from the Fig. 1.Map of linear magnetic anomalies in the northwestern Indian Ocean according to (Seton et al., 2014) and magnetic profiles, crossing anomalies A24 A25and A26: the plate boundary (1), crossings of MA (2), axes of linear magnetic anomalies (3), magnetic profile (4), and polarity chron denotation(5).Yellow box in the inset map outlines the region shown by the larger map. Magnetic anomalies in the areas outlined in black box are shown in Fig. 3. convolutionj(x) and
is a function that depends on depths of the upper (a) and lower (b) edges and the magnetization vector orientation. In the Fourier domain, the convolution procedure is equivalent to a simple multiplication of Fourier images:
As is shown in (Schouten and McCamy, 1972), the MA Fourier transform (spectrum) can be written in the following form for an ideal spreading model:
where is the parameter characterizing the anomaly asymmetry (skewness) and C is the amplitude coefficient. This expression indicates that MAobserved at a certain distance from the magnetic layer fundamentally represent initial signal ) ( J which came through a bandpass filter,
, i.e., an Earth filter (Schouten, 1971;Schouten and McCamy, 1972).For usual seafloor parameters a = 3.0 kmand b = 3.5 kmthe bandpass is 10-50 km,thus, shortperiod anomalies of the TW type with periods shorter than 10 km are “filtered” with an Earth filter, since the magnetic layer is located far from the observation level.
For more realistic oceanic crust structure the magnetic anomaly spectrum can generally be written in the following form:
The eruption of new lavas (the extrusive process (Schouten and McCamy, 1972)) and the formation of vertical dikes (the intrusive process (Harrison,1968) are often modeled with Gaussian functions g(x)with the parameterσ.The spectral density of this function is well known:
We have estimated resolvability of marine magnetic anomalies using the two approaches.
Estimation Based on a Spectral Approach.
Analysis of the spectrum makes it possibleto estimate the source depth. Ifdeep sources exist, the contribution of low frequencies increases and distributed stochastically.If also the sources are distributed stochastically, the slope (α) of the energy spectrum natural logarithm plot is related to the source depth (z)by ) 2 arctan( z . Iftheenergy spectrum slopes insignificantly for high frequencies, this indicates that the sources are located near the ocean surface and are independent of the basaltic layer (Spector andGrant, 1970). The shortest obtained wavelength above the noise levelis approximately 3-5 km. This means that the positionof blocks generating anomalies, which are located at adistance of 3-5 km and more from one another, cantheoretically be determined.
We apply the Cramer-Rao method of mathematical statistics in order to estimate the resolvability of small amplitude short period anomalies, see details in (Ivanov and Merkuryev, 2013). We first consider the VM model. Theoretical MA calculated from the magnetic layer were constructed with the use of the Cande and Kent (1995) scale at a spreading rate of 6.7 cm yr -1 with a quantization interval of 1 km. Normally distributed noise with an rms deviation of σ = 3 nT is imposed on the field. Note that the obtained minimal error values vary proportionally at different values of σ. Both for VM model and the smoothed model the block width is determined much more acc
…(Full text truncated)…
This content is AI-processed based on ArXiv data.