Stochastic Longshore Current Dynamics
We develop a stochastic parametrization, based on a `simple' deterministic model for the dynamics of steady longshore currents, that produces ensembles that are statistically consistent with field observations of these currents. Unlike deterministic …
Authors: Juan M. Restrepo, Shankar C. Venkataramani
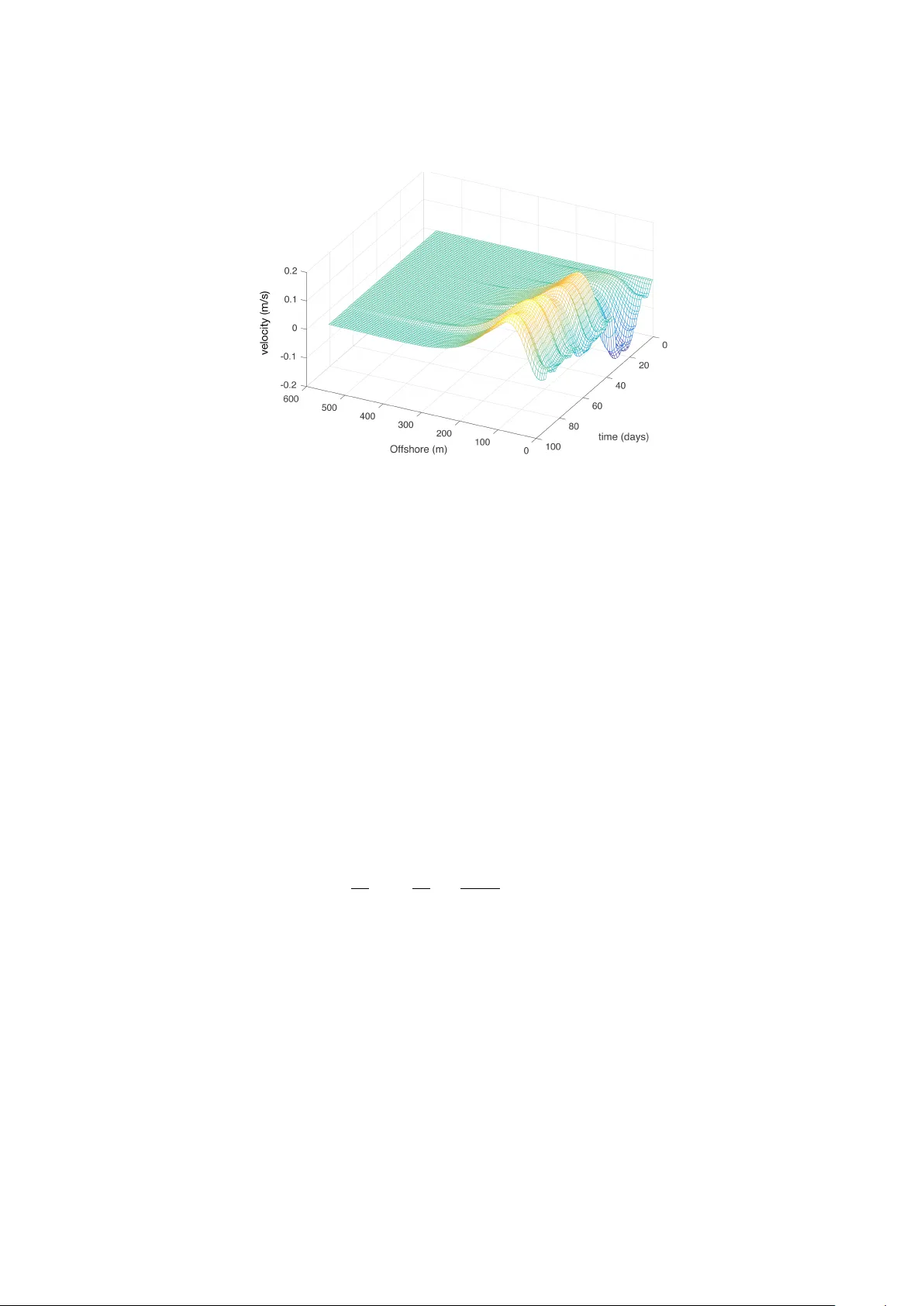
Sto c hastic Longshore Curren t Dynamics Juan M. Restrep o a,1 , Shank ar V enk ataramani b a Dep artment of Mathematics, and Col lege of Earth, Oc e an, and A tmospheric Scienc es, Or e gon State University, Corval lis, OR 97331, USA b Dep artment of Mathematics and Pr o gr am in Applie d Mathematics, University of A rizona, T ucson AZ 85721, USA Abstract W e dev elop a stochastic parametrization, based on a ‘simple’ deterministic model for the dynamics of steady longshore currents, that pro duces ensembles that are statistically consistent with field observ ations of these currents. Unlik e deterministic mo dels, sto c hastic parameterization incorp orates randomness and hence can only matc h the observ ations in a statistical sense. Unlik e statistical em ulators, in which the model is tuned to the statistical structure of the observ ation, sto c hastic parametrization are not directly tuned to matc h the statistics of the observ ations. Rather, stochastic parameterization combines deterministic, i.e ph ysics based mo dels with sto chastic mo dels for the “missing physics” to create hybrid mo dels, that are sto c hastic, but y et can b e used for making predictions, esp ecially in the context of data assimilation. W e introduce a nov el measure of the utilit y of sto chastic mo dels of complex pro cesses, that w e call c onsistency of sensitivity . A model with p o or consistency of sensitivity requires a great deal of tuning of parameters and has a very narrow range of realistic parameters leading to outcomes consisten t with a reasonable sp ectrum of ph ysical outcomes. W e apply this metric to our stochastic parametrization and sho w that, the loss of certaint y inherent in mo del due to its stochastic nature is offset b y the model’s resulting consistency of sensitivity . In particular, the sto chastic mo del still retains the forward sensitivity of the deterministic mo del and hence resp ects important structural/physical constrain ts, y et has a broader range of parameters capable of producing outcomes consisten t with the field data used in ev aluating the mo del. This leads to an expanded range of model applicability . W e sho w, in the con text of data assimilation, the sto c hastic parametrization of longshore curren ts achiev es goo d results in capturing the statistics of observ ation that wer e not use d in tuning the mo del. Keywor ds: longshore curren ts, sto c hastic parametrization, parameter sensitivity, consistently of mo del sensitivit y, data assimilation. 1. In tro duction Longshore (alongshore) currents are ubiquitous o ceanic flows in nearshore environmen ts (see [1], for a descriptiv e review). The tw o mechanisms resp onsible for their existence are w a ve stresses and alongshore sea elev ation gradients. Because longshore currents affect nearshore bath ymetry and b eac h morphology , and are resp onsible for a great deal of nearshore transp ort, mo dels for these curren ts are of great practical utility . Presen tly , deterministic w av e-resolving models are used with goo d results, capturing some of the complex dynamics of the nearshore, including longshore currents (see [2], [3], [4], [5]. See also [6]). Of note are w av e-resolving, depth-in tegrated mo dels based up on the Boussinesq equations, such as funw a veC ([7]). These ha ve shown considerable forecasting skill (See for example, [8], and [9], in whic h field data on eddy v ariability and dye and drifter dispersion are compared to funw av eC mo del output). The success of fun w av eC in capturing a wide range of nearshore o ceanic phenomena rests upon its generalit y: it includes higher ∗ Corresponding author Email addr ess: restrepo@math.oregonstate.edu (Juan M. Restrepo ) Pr eprint submitte d to A dvanc es in Water R esour c es Octob er 15, 2018 order disp ersion (see [10]), a general b ottom drag parametrization (see [8]), wa ve breaking momentum transformation parametrization via Newtonian damping (see [11]) and the breaking viscosity mo del [12]. Non-w av e resolving complex mo dels of the nearshore o cean en vironment exist as w ell. These also ha ve compared fav orably with certain asp ects of longshore curren t dynamics and observ ations, such as longshore shear instabilities. They can also capture other nearshore flo ws, such as rip currents, consistent with observ ations ( [13], [14], [15] and references contained therein). None of the mo dels capture longshore current observ ations in a statistically faithful manner. By fidelit y w e mean that the time series generated b y the model and the observ ations are indistinguishable, statistically . The most familiar mo deling approach to improving mo del fidelity is to resolv e and include more ph ysics (or b etter physics). The present state-of-the-art in longshore mo deling is the wa ve-resolving mo dels men tioned ab o v e. An approac h that directly focuses on obtaining statistical fidelity is statistical em ulation (see [16]). In this strategy observ ations are used to build phenomenological mo dels. The fundamental mo deling strategy consists of prop osing a basic statistical distribution or a regression mo del. Structure is built into the mo del b y calibrating the mo del’s correlations and other statistical dep endences with data. The goal of this pap er is to prop ose and demonstrate the use of an alternative mo deling approac h, called sto c hastic parametrization. It is an intermediate b etw een the deterministic and the em ulator approaches to modeling physical phenomena. This strategy yields a mo del that has as muc h structure and physics as p ossible, leaving as little as possible to chance. A go od stochastic parametrization yields structure in the statistics of its time series by the blend of deterministic and sto chastic elements, rather than b y tuning the mo del using data to incorp orate the correlations and structure of the observ ations. A common use for stochastic parametrization is to incorp orate in a computationally efficien t wa y unre- solv ed dynamics that cannot be ignored ev en if the model fo cused on large spatio-temporal scale phenomena. A familiar practical example of deterministically parametrizing small scales is via homogeneization (see [17]): when the small scales offer a certain amoun t of scale separation and it is statistically homogeneous, the small scale av erages that p ersist app ear in the resulting deterministic mo del as compleme n tary or added terms. A more sophisticated approac h, in computational fluid mechanics, is large eddy sim ulations (LES) of turbulen t flo ws. In that case the complemen tary/added terms themselv es hav e their own dynamics whic h come from closures of higher moment statistics. Sto chastic parametrization is mean t to increase a mo del’s fidelity , but unlik e LES, it will not do so rationally . F or the longshore current model featured in this paper the sto chastic parametrization will b e used to capture the small scale v ariability present in the observ ations, enhancing this w ay its fidelity , not its rationality . In this study we will purp osely choose the simplest p ossible mo del for longshore current dynamics, a balance model, as a starting p oin t. Clearly , a mo del that already has improv ed ph ysics w ould b e a b etter c hoice for the developmen t of an op erational sto c hastic mo del, but a simple and familiar mo del mak es it plain, to what extent the stochastic parametrization is effectiv e in enhancing the original deterministic mo del’s fidelit y . Balance models for longshore curren ts capture nothing more than the most basic of ph ysical pro cesses, alb eit under strong assumptions. Nearly all of the physics in longshore curren t mo dels are captured b y empirical parametrization: the mo dels incorp orate parametrized wa ve radiation (or the vortex force), w av e breaking, turbulence, stress and drag forces. The longshore mo del we will use is derived from the v ortex force form ulation for the ev olution of wa ves and currents in the nearshore (see [18], and [19]). The v ortex force mo del is a general, non-w av e resolving, mo del. It was used in [20] to describ e the ev olution of rip currents, as w ell as longshore currents in [15]. This mo del (see Appendix A) will b e referred to as the vortex for c e mo del , in order to distinguish it from the simpler and specialized b alanc e mo del for longshore curren t dynamics. The plan of the rest this pap er is as follo ws: after describing essen tial bac kground to the nature of the data, in Section 2, w e introduce in Section 3 the longshore balance model that will b e used as a basis for the sto c hastic parametrization. Section 3 discusses the conditions under whic h the longshore balance mo del is derived from the non wa ve-resolving, wa v e-current interaction, vortex force model. Stochastic parametrization can lead to better c onsistency of mo del sensitivity , at the exp ense of increased uncertaint y . The topic of consistency of sensitivit y will b e taken up in Section 4. A mo del that has consistent sensitivity will hav e a wide range of physically-meaningful parameter com binations with which to capture a broad sp ectrum of ph ysical outcomes. The balance model will b e used to explore and illustrate the consequences of 2 sensitiv e consistency . The stochastic parametrization, inspired by the data and constrained by the physics of longshore curren ts, is introduced in Section 5. Sto c hastic parametrization of unresolved physics, as evidenced b y the data, is used to construct a sto c hastic balance longshore mo del. Suggesting a simple mo del for observ ational data that is clearly non-Gaussian will lead us to in tro duce Gaussian mixtures. With this c hoice of sto c hastic parametrization the sto c hastic longshore mo del is sho wn to compare fav orably with observ ations. Notably , the mo del captures correlations present in the data without ha ving to explicitly put these into the mo del. F urthermore, the sto c hastic longshore mo del will b e shown to hav e consistent sensitivit y . How ev er, the use of Gaussian mixtures reduces the fidelity of the model. The p oint of using the mixture mo del will nevertheless make the mo del amenable to simple linear/Gaussian data assimilation metho ds. Data assimilation is a very useful metho dology for combining observ ations and models. Sto chastic mo dels are well suited for this application, as will b e shown in Section 6, using the prop osed sto chastic longshore mo del and observ ations in a concrete data assimilation example calculation. 2. Longshore Current Observ ational Data In the pro cess of constructing a sto c hastic parametrization, as well as in testing the resulting sto c hastic mo del, w e will make use of field observ ations. W e will use the data set collected in Duck, North Carolina b y Herb ers, Elgar, Guza, and Birk emeier, Long and Hathaw ay (see [21]). Henceforth, we shall refer to this data as the Duck data . The Duc k data rep ository provides data, and in particular, information on nearshore flo w mean velocity . It also has recordings of o cean pressure, temp erature, and depth, ov er the course of sev eral mon ths. It also con tains information on the p eak frequency , direction, and sea elev ation amplitude of incoming wa v es. Bathymetry as well as the conditions under which the data w as obtained is av ailable as w ell. The Duck data as w ell as ancillary information are av ailable from: frf.usace.army.mil/pub/Experiments/DUCK94/SPUV . A plot of a t ypical b ottom top ograph y cross section appears recreated in Figure 1. The plot also shows the data collection devices and data collection lo cations. The cross shore and longshore components of the v elo c- it y w ere collected at a sampling rate of 2 Hz for 10784 seconds, every 3 hours. The data collection spanned the mon ths of August, September, Octob er, and early No vem b er, 1994. Sp oradic instrumentation failure lead to interruptions in data collection. The cross-shore velocity comp onen t is zero on a v erage for most of the data gathering campaign, and is ignored in this study . The sp ecific ”SPUV data” streams w e will mak e use of are from measurement lo cations v12, v13, v14, v15, whic h were lo cated approximately at the offshore co ordinates 205, 220, 240, and 260m, resp ectively . The transect we will work with is at roughly 930m in the alongshore ( y ) direction. A t these stations the data exhibits goo d signal to noise c haracteristics. The loca- tions correspond a lo cation righ t b efore the w av es shoal and break. W e will also b e using another set of data, collected during the same time perio d as the SPUV longshore current data, and it consists of wa ve elev ation, w av e perio d, and w av e direction, further out from shore, roughly 900 m offshore, where the water depth is approximately 8m. This data is av ailable from frf.usace.army.mil/pub/Experiments/DUCK94/FRF . Figure 2 shows a more general view of the bathymetry , reconstructed from Octob er 1994 data. As can b e seen, the alongshore v ariability in the bathymetry is mild and is used to justify pic king a single y -lo cation for the data. In any ev en t, our fo cus is on the metho dology of sto c hastic parametrization, rather than on observ ations or the v alidit y of the sp ecific mo del chosen. 3. The Longshore Curren t Balance Mo del One of the earliest balance mo dels for longshore currents is due to Longuet-Higgins [22, 23]. In his mo del longshore curren ts are driven by the w av e radiation stress (see [24, 25]). Several several simplifying assumptions w ere made in the formulation of the mo del: the current was assumed steady , the b ottom h ( x ) w as assumed to b e gen tly sloping, i.e. , with a slop e β := dh/dx , where x is the (offshore) distance from the shore, in the range 0 < β 1. The b ottom was also assumed featureless, and v oid of alongshore y dep endence. Nonlinear effects were ignored, wa ve refraction was ignored and the angle of incidence of the 3 1 2 1 3 1 4 1 5 Figure 1: Cross section of bathymetry , along the transect y = 929 . 8m. The t yp e of measurements that were collected are indicated. Stations v12-v15 are indicated as well. -5 1400 0 1200 200 Alongshore, y (m) Offshore, x (m) 1000 0 400 Depth, h (m) 800 600 600 5 Figure 2: The bathymetry , Octob er 1994. The Duck bathymetry is characterized by mild changes in the top ograph y in the alongshore direction, compared to changes in the crossshore direction. 4 w av es w as assumed to not differ considerably from the normal to the b eac h. Finally , the water column depth H was approximated by the depth h , which is the distance from the bottom to the quiescent sea level. In its classic form the mo del suggests that longshore curren ts result from a balance of the drag force D , the gradient of the (transverse) radiation stress tensor S due to w av es, and dissipation N . With the depth-a veraged and time-av eraged current denoted by u = ( u, v ), the current v is given b y the y -comp onent (alongshore) of the momen tum balance. The balance reads 0 = − c D v − ∂ S xy ∂ x + N ∂ ∂ x p g hh ∂ v ∂ x . (1) The first term on the righ t hand side on (1) is the b ottom drag, with a particularly simple parametrization: the drag force is prop ortional to the current, c D ≥ 0 is the prop ortionality constan t. The second term is the gradient of the net stress p er unit area due to w av es, where S xy ≈ σ W cos θ sin θ . W is the wa ve action, σ is the w av e frequency . The angle θ is with resp ect to the co ordinate x , normal to the shore. The last term is the y -comp onen t of the lateral dissipation, N is a dimensionless tunable parameter. This particular dissipation model was suggested by Longuet-Higgins, [22, 23]. It is based up on dimensional arguments and mak es many approximations including the assumption that the longshore currents o ccur ov er mildly slop ed bath ymetry . (See [26], for an analysis and discussion of this dissipation mo del and some of its alternatives). In what follows we will use a similar and equally simple balance mo del. W e will denote it the L ongshor e Balanc e Mo del , hereon. The mo del derives from the V ortex F or c e model for wa ve curren t interactions, whic h is describ ed in App endix A. Similar assumptions as those made by Longuet-Higgins tak e us from the vortex force mo del to the longshore balance mo del (see discussion leading to (A.11). The longshore mo del is 0 = − c D v + α β B h 5 + N ∂ ∂ x p g hh ∂ v ∂ x . (2) In (2) α := 12 / √ π g B 3 r /γ 4 ≥ 0 , β B := A 7 k sin( θ ) . The w av enum b er magnitude is k . the sea elev ation is A , and g is gravit y . B r and γ are parameters associated with w av e breaking and sea elev ation, resp ectiv ely . The longshore balance mo del is equiv alent to a balance mo del prop osed b y Thorn ton and Guza [27]. When they compared their mo del to field data, obtained off the gently sloping coast of their test site in California (USA), they found go o d agreemen t. This agreement seemed not to dep end in an y strong w ay on ha ving dissipation. Ho wev er, when they compared their mo del to data obtained o v er a barred b eac h, suc h as the Duck site data, their mo del was inadequate. F urther analyses of comparisons of mo dels and the Duck data asso ciated with the DELILAH field campaign [28] brough t into question the linear mo del for the b ottom drag force, and further, the need for a spatially v arying b ottom friction in order to get better agreemen t b etw een model and data. Over the years several improv ed mo dels for the b ottom drag hav e b een proposed. See, for example, [29], for a b ottom drag model that is directly inspired by the Duc k and Sup erDuc k data sets. Nev ertheless, we will k eep the linear b ottom drag mo del in the longshore balance mo del, since it leads to sp ecial modeling challenges and the goal of this w ork is to demonstrate stochastic parametrization as a to ol with which to improv e mo del fidelit y . 4. Consistency of Sensitivit y Analysis There are sev eral practical reasons for an analysis of the mo del’s sensitivity , to either forcing/b oundary conditions, initial conditions, or parameters. One reason is to iden tify whic h of these has the most impact (usually in the linearized sense) on the mo del outcomes (see [30]). Sensitivity and uncertaint y are t wo differen t things, but they are sometimes intert wined. Another reason is to diagnose sensitive dep endence on initial conditions in evolution equations. Sensitive dependence is a hallmark of chaotic systems. Y et another reason is to ev aluate the robustness of numerical approximations to evolution equations. 5 The most common w ay to assess these sensitivities is b y a forward linearized approac h. In forward sensitivit y analysis we w ant to determine how relativ e p erturbations of the outputs dep end on relative p erturbations of the inputs (in bac kw ard sensitivit y analysis w e instead ask what relative inputs are required to pro duce a certain relative p erturbation of the output). In similar fashion, one could also determine explicitly or implicitly the functional relationship betw een mo del outcomes and p erturbations of parameters. One outcome is to determine whether a broad sp ectrum of physical outcomes are reached by reasonable and sensible range of parameters. How large should one determine the ranges of outputs and input parameters? One reasonable approac h is to seek similar ranges in the physics of its measurements and the ph ysical v ariables that inform the parameters in the mo del. Consistency of sensitivity (to parameters) is similarity in the structure and the relativ e magnitudes of v ariations in the model outcomes to v ariations in the parameters, and their measured v alues. Clearly , the concept is qualitative and it is not universally applicable: some mo del parameters ha v e no ph ysical coun terpart. F orward (linear) sensitivity analysis is used to determine the explicit dep endency of longshore velocity fluctuations on the w av e forcing. These fluctuations are with resp ect to the ensemble mean, denoted by h·i . In what follows we will ignore the lateral dissipation, as it is though t to b e less critical to longshore dynamics than the other forces in the longshore balance mo del (see [28]). Ignoring dissipation in (2) w e get the balance equation c D h h v i = α h k sin θ A 7 i h 6 , (3) The sensitivit y of the longshore current is obtained by taking the first v ariation to obtain c D h h ∆ v i + ∆ c D h h v i ≈ ∆ k k + 7∆ A A 7 + cos θ ∆ θ sin θ h v i . (4) The sensitivit y in the angle, ev en when small, can be ph ysically dramatic when the av erage angle of incidence is nearly zero since sin( θ ) in the denominator is small. Nev ertheless, w e will fo cus in this study on the v ariability of velocity fluctuations to changes in A and c D . Concerning these, h ∆ v i ∝ k sin θ A 7 h 5 c D 7∆ A A − ∆ c D c D . W e denote the w a ve amplitude supplied by wa v e forcing from the deep waters as A ∞ . Since A = A ( A ∞ ) (see ahead, in (8), for the sp ecifics), we appro ximate ∆ A by ∆ A ∞ , and assume that the relative v ariability in the amplitude ∆ A/ A ∆ c D /C D , the relativ e v ariabilit y in the drage co efficien t. With these approximations, h ∆ v i ≈ const k sin θ h 5 ∆ A ∞ c D . (5) W e refer to (5) as the drag-wa ve forcing sensitivity analysis estimate , and we will build a sto c hastic parametrization that resp ects, to a certain extent, this analysis. 4.1. Consistency of sensitivity analysis for the Deterministic Mo del There are tw o challenges in using data to tune model parameters. P osed as questions, what sort of statistics do w e apply on the data to affect the comparison to the mo del? And the more c hallenging question, for a given set of parameters, do w e retain consistency with the inherent structure of the mo del, for a reasonable range of mo del inputs? The Duck data will be used to tune the mo del represen ted by (2). (The dissipation will b e ignored). The en tire 8m depth offshore time series data set for k , θ , and A ∞ is used to get estimates of their mean v alues. (The disp ersion relationship (A.1) and w av e n umber conserv ation (A.2) equations are required to relate the observ ed wa v e p eriod to k ). The wa v e action equation (A.4) is needed to relate A at the measuring stations to the observ ational data, A ∞ , obtained in the deep er w aters. W e then proceed by finding c D so that the mean data for v at station v13 coincides with the predicted v alue of v , via (2), at that lo cation. 6 A Figure 3: Sensitivity curv es for the balance mo del, (2), in ( A ∞ , c D ) parameter space. The mo del w as forced using observ ational data captured in 8m depth offshore waters. F or the wa v e forcing a a time av erage v alue is used. Time average v alues were also used for θ and for k . The con tours represen t the mean of the difference between the estimated v elo city and the measured velocity at station v13. Figure 3 sho ws contours of discrepancy b etw een the v alue of the calculated and observed longshore v elo cit y at station v13. W e note that for small off shore wa ve amplitudes A ∞ , the longshore velocity is relativ ely insensitive to the drag parameter, while for large A ∞ , the longshore v elo cit y is indeed sensitively dep enden t on c D . The conclusion from this exercise is that for certain data one is forced to c ho ose unph ysical com binations of ( A ∞ , c D ) to obtain agreemen t betw een mo del outcomes and field data, or parameter c hoices that mak e the mo del unacceptably sensitiv e. Both of these issues are symptomatic of inconsistency of the sensitivit y: even if one obtains reasonable agreement b et ween the mo del and the data some of the com binations that lead to agreement b etw een mo del and data may not resp ect the sensitivity e stimate, (5). (F ortunately the situation is less dramatic when the (full) complex mo del is used instead and is tuned to obtain reasonable agreemen t with data). The model we chose is simply to o crude and th us the inconsistency is extreme, reflecting the fact that the model is missing some of the imp ortan t ph ysics of the problem, and the simple physical mechanisms that are retained in the mo del are incapable of describing the observ ations with reasonable v alues for the mo del parameters. It is not hard to see that such inconsistency of sensitivit y is also shared b y the more complex vortex force mo del. How ever, sto c hasticity can b e introduced to tame the inconsistency , as will b e sho wn in what follows. 5. A Sto c hastic Balance Mo del for Longshore Curren ts The goal is to pro duce a simple, consistent in sensitivity , balance mo del for longshore currents. This will b e accomplished b y enhancing a balance mo del via sto c hastic parametrization in order to accoun t for the short-time v ariability observ ed in the data. The short-time v ariability cannot b e captured by the original balance mo del (2), even when the forcing is obtained from the 8m water observ ations. Clearly , a great deal of physics is missing. W e will only pursue sto chastic parametrization rather than to complement the crude mo del with b etter or more physics. W e will b egin with an analysis of the data. Two data sets will be used in the mo del formulation. The “8m offshore” wa ve data largely informs β B in (2), and a longshore time series data will b e used as “training data.” W e will then compare the training data, whic h is the longshore velocity time series at a sp ecific lo cation, to the longshore model driven by the 8m w a ve data. The parameter c D in the drag force will b e calibrated to enhance the role play ed by the drag term in (2) in constributing to the empirical histogram that results from a comparison of the training data and the longshore mo del driven by the 8m offshore data. The remaining discrepancies in the empirical distributions are then brought to a minimum by the addition of a stochastic parametrization of momen tum contributions. The discrepancy in the histograms of the forcing and the longshore velocity is presumed largely due to missing ph ysics in the original balance 7 T able 1: First r ow: empiric al statistics of the time series V , the longshor e velo city v (m/s) at station v13. Subse quent r ows: the wave quantities, me asur e d at 8m depth offshor e lo c ation: the p erio d T in se c onds, the signific ant wave height H mo , and wave dir e ction θ (de gre es). Duck data, Septemb er, 1994. v ariable mean median mode standard deviation V (m/s) 0.0373 -0.0130 -0.032 0.2931 T = 2 π /σ (s) 9.907 9.706 13.56 3.114 H mo = 2 √ 2 A ∞ (m) 0.8272 0.6410 0.3850 0.5821 θ (degrees) -2.160 -4.000 -8.000 21.15 mo del. A mo del that assigns to sto chasticit y as little of the mo del fidelity as p ossible is preferred, and further, we fa v or simple noise pro cesses rather than complicated ones. W e will use mak e frequent use of Gaussian mixtures to capture non-Gaussianit y . See [31] for details on Gaussian mixtures. 5.1. Analysis of the Data W e will b e fo cusing on longshore velocity field data from one particular lo cation, station v13. This is the “training data.” W e will denote this data time series as V , in what follo ws. Some of the basic statistics on the V data app ear in T able 1. These statistics p ose a c hallenge to the balance mo del (2) and it is apparen t in Figure 3: if w e use mean v alues for the data A ∞ as well as k ( T ) and θ and we insist that the drag force parameter c D is p ositive, the mo del will generate a negativ e mean estimate for V . One migh t think that using the more complex mo del presented in the App endix will circumv ent the conundrum, how ever, the deriv ation of the longshore balance mo de using the vortex force mo del as a starting point makes it plain that the problem would be present had the v ortex force mo del b e used. (One could use the median or mo dal v alues for the quantities in question, but the mo del appearing in the App endix is a mean-field mo del (see [32, 18])). W e use instead an ensemble mo deling approac h. The w a ve forcing will b e computed via (8) using the 8m depth offshore wa ve forcing data. Before constructing the sto chastic longshore mo del we will examine asp ects of the statistics of the data that pro vide v aluable ph ysical constraints for the mo deling pro cess. W e b egin, ho wev er, with finding approximations to the empirical probability distribution functions (p dfs) of the data. Figure 4 shows that a Gaussian mixture [33] approximates well the pdfs of the sea elev ation, w av e direction, and wa v e frequency of the 8m depth offshore data. W e sp ecifically use the Exp ectation- Minimization Algorithm (EM, hereon) in the Gaussian mixture calculations. Sup erimp osed, and app earing as dashed lines, are the 2 Gaussians used in the p df mixture representation. W e highligh t the sk ewness of the distributions. Skewness is also eviden t in the Gaussian mixture approximation of the empirical histogram of V . See Figure 5a. In Figure 5b we display the time series of the longshore velocity V , for several months, starting on August 1 and running till the end of Octob er, 1994. This data was used to produce the empirical histogram for V . Prominen t in the time series is the faster v ariabilit y o ccurring at the hourly time scale, as w ell as the slow er v ariability changing on multi-da y time scales. The connection b et w een the offshore data and the longshore velocity is through the term β B ( A ∞ , k , θ, x ) = A 7 ( x ; A ∞ ) k ( x ; σ ) sin( θ ) . (6) The β B app ears in the second term on the righ t hand side of (A.11) and in the second term on the right hand side of (2) (see also (A.9)). The term αβ B /h 6 is a parametrization of momentum exchanges b et ween w av e breaking pro cesses and currents. The relationship b et w een k , the w av enum b er and the 8m offshore frequency data is found via the disp ersion relation (A.1). The relationship b et ween the amplitude A ( x ) and the 8m offshore wa v e amplitude data is found approximately as follows: assuming that the v ariability of the w av es is not resolv able at the current time scales, (A.4) is then d dx [ W C g ] = − σ , (7) 8 (a) (b) wave direction (deg) -40 -20 0 20 40 60 80 0 0.2 0.4 0.6 0.8 1 1.2 1.4 (c) wave angular frequency (1/s) 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2 0 0.5 1 1.5 2 2.5 3 Figure 4: Duck wa ve data (8m depth offshore data). Histograms of the (a) sea elev ation (w a ve height) (m), (b) wa ve direction (degrees) and (c) angular frequency (1/s). The times series w as collected at a 2 Hz rate, con tinuously for 8192 seconds, ev ery 3 hours, during August-October, 1994. Gaussian mixture, solid, the t w o Gaussians of the mixture, dashed. ignoring alongshore v ariation and taking H ∼ h , and the group v elo cit y | C G | ≈ √ g h (the group velocity is otherwise found to b e giv en b y (A.5)). The dissipation term is defined in (A.9). The wa v e amplitude is then giv en approximately , b y A ( h ; A ∞ ) = h − 1 / 4 [ h − 5 / 4 ∞ A − 5 ∞ − ˜ δ ( h − 23 / 4 − h − 23 / 4 ∞ )] − 1 / 5 , (8) with ˜ δ = 10 δ 23 β . See [34]. Here, δ = 2 ασ g − 3 / 2 . The amplitude of the w av es, or wa ve forcing, is A ∞ , at depth h ∞ := β x ∞ . The depth h ∞ ≈ λ/ 20, where λ is the wa v e wa velength. This is a depth at which there is less than a 1% discrepancy betw een H and h in the shallow w ater wa ve limit, k H (we note that (8) can yield unph ysical results, as it can lead to A b eing zero for certain v alues of h ). The mo del for (see A.9) could b e mo dified to accoun t for viscous dissipation, which b ecomes more prominent v ery near to the shore. (In [35] it is shown that sto chastic v ariabilit y mean t to capture episodic wa v e breaking leads to a Stokes drift v elo cit y that has the familiar deterministic comp onen t as w ell as a diffusion-dominated term, how ev er, this t yp e of dissipation w ould b e o verwhelmed by nearshore breaking). In the sto chastic parametrization approac h we work with ensembles. W e first need to create a distribution for β B . Samples of β B can b e pro duced via rejection Monte Carlo sampling (see [36]), using the 8m offshore data. The empirical historgram that results from the rejection sampling using the offshore data app ears in Figure 6. This distribution w as obtained under the assumption that the samples from A , k and θ were indep enden t. W e note that the distribution obtained this wa y is skew ed and very narrow (it is even narro w er and similarly sk ewed when the assumption of indep endence is not used). As we will discuss presently , a comparison of the empirical auto correlation times of the 8m offshore data and the training set V will play a critical role in assessing the resulting sto c hastic longshore balance mo del. Figure 7a portrays the autocorrelation τ β of time-ordered β B , which found using the 8m depth offshore wa ve data as input. The correlation time τ β is ab out a da y . It is comparable to the auto correlation time τ V , whic h corresponds to the longshore curren t time series data at location v13 (see Figure 7b). There are 3 imp ortan t p oints to mak e in connection with the results portray ed in Figure 7: the auto correlation length 9 (a) longshore velocity v (m/s) -1.5 -1 -0.5 0 0.5 1 1.5 0 0.5 1 1.5 2 2.5 3 3.5 4 (b) Figure 5: Duck data. Longshore v elo cit y V . Time series data at station v13 (measured ab out 220m offshore), starting on August 1, 1994. (No data is a v ailable during days 14-17). The empirical, Gaussian mixture appears in (a) as dashed curv es. Superimp osed is the empirical p df of the longshore v elo cit y V . The distribution is non-Gaussian, i.e. , sk ewed. The time series of V app ears in (b). -5 -4 -3 -2 -1 0 1 2 3 4 5 - B (x), m 2 /s 2 # 10 -3 0 50 100 150 200 250 300 Figure 6: Histogram of β B . See (6). Computed by dra wing samples of k , A , and θ , assuming these are indep endent. Note skewness. 10 (a) lag (days) 0 2 4 6 8 10 12 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1 (b) lag (days) 0 1 2 3 4 5 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1 Figure 7: (a) The auto correlation τ β of β B , using A ( A ∞ ) , k, θ observ ations as input. W e denote this the autocorrelation time τ β and it is about 1 da y . It is found by calculating a time series of β B from time-ordered triplets of A ( A ∞ ) , k, θ observ ations. In (b) we display the auto correlation τ V . This is the auto correlation of the time series of the longshore velocity data at station v13. W e note that τ β is comparable to τ V . is similar in the sto chastic mo del and in the data; the auto correlation length is mainly set by the wa v e forcing; the sto c hastic mo del righ tly delivers the auto correlation; it was not tuned or manipulated to agree with data. 5.2. F ormulating an Unc ertainty Mo del via Sto chastic Par ametrization There are 4 terms in the momentum balance, (A.11). As we noted in the previous section, the v ariability of empirical distributions of V and of the term α β B /h 6 are v ery disparate. The b ottom drag co efficien t c D is tuned to obtain a certain balance with the term α β B /h 6 . W e will use tune c D so that the supp ort of the empirical distribution of c D V and α β B /h 5 are comparable. The estimate for c D ≈ 0 . 007 m/s. The time series for V is suggestive of at least t w o time scales in the dynamics. The drag term c D v and the momentum exchange αβ B /h 5 term, are meant to dominate the momentum balance at the longer time scales. The computed time auto correlations shown in Figure 7 in fact support the claim that there are t wo very disparate time scales, h/c D τ β . These disparate time scales provide reasonable justification to lump all of the short-time missing physics, collectiv ely represented b y ∂ v /∂ t , by an additiv e sto c hastic term. In [4, 5] this short term v ariability is ascrib ed to shearing instabilities (see [13]). Shorter time scale wa ve breaking is also noted as a significant fast-time influence on longshore curren ts (see [6]). W e thus pro ceed with the sto c hastic parametrization, fo cusing on capturing the missing fast-time v ariability . First, since the mean of the data-informed α β B /h 6 and of c D V /h are not the same, the balance of these t wo terms will on av erage b e non-zero, leading to a steady acceleration and thus a bias in the longshore curren t. In view of these constraints w e prop ose a sto c hastic mo del for the predicted velocity v ( x, t ) := h V i + v 0 ( x ) + v 0 ( x, t ), where h V i is the data mean. The space-time solution of v 0 ( x ) app ears in Figure 8. The sto chastic longshor e velo city b alanc e mo del we prop ose (which for completeness includes the lateral dissipation) reads 0 = ( L − c D h ) v 0 − α h β B i h 6 + α β B h 6 − c D h v 0 ( x, t, η t ) , (9) v 0 ( x, t, η t ) = N ` X ` =1 f ` ( x, t ) P ` ( η t ) . (10) L w = N 1 h ∂ ∂ x √ g hh ∂ w ∂ x . η t is a random v ariable with known asso ciated distribution ρ ( η t ). P ` are (in this instance) Hermite polynomials of degree 0 ≤ ` ≤ N ` . The expansion co efficients f ` are found via standard pro jection, since R ∞ −∞ P ` ( η t ) P j ( η t ) ρ ( η t ) dη t = √ π δ `,j . The Gaussian measure ρ ( η t ) is obtained from observ ational data. The Gaussianity of this measure is assumed and it represents measurement ”error.” See [37] for further details. 11 Figure 8: Space-time plot of v 0 ( x ). Since the mo del in question is simple we will disp ense with the polynomial c haos representation in fav or for a crude Gaussian mixture parametrization of v 0 . Sp ecifically , v 0 ( t ) = N ` X ` =1 a ` N t ( m ` , σ ` ( v 0 )) , (11) N t are Gaussian v ariates. v 0 can hav e a non-zero mean. The input to the EM is the data-informed quan tity − c D ( V − h V i ) + α/ ( β B − h β B i ) /h 5 , at x corresponding to station v13. F or the data under consideration N ` = 2 was adequate. An empirical histogram of v 0 is shown in Figure 9. Using dashed lines we highlight the 2 Gaussians in the mixture. In what follo ws we will assign ` = 1 in (11) to the narro w Gaussian in the mixture, and lab el the broader one by ` = 2. The Gaussian mixture captures the empirical p df well, and the mo del is complete. In the next section we will apply the mo del in a data assimilation exercise. Sto c hastic models are well suited to Bay esian inference since they can provide concrete priors. In anticipation of this application, w e will actually suggest a less accurate but considerably simpler representation for v 0 . It is clear that the mixture comp onen t centered at the mode, the ` = 1, has v ery narrow v ariance and could b e approximated b y its mo de. W e retain the ` = 2 Gaussian mixture component. The sto chastic longshore balance mo del, simplified, is th us v ( x, t ) ≈ − α c D h L − c D h i − 1 β B ( x ) h 6 ( x ) − a 1 + a 2 N t ( m 2 , σ 2 ) . (12) where a 1 = 0 . 04, a 2 = 0 . 4, m 2 = 0 . 04, σ 2 = 0 . 4. Adjusting for means, Figure 10 sup erimp oses v ( x ) at station v13, giv en by (12), and V . 6. Data Assimilation using the Sto chastic Balance Mo del W e apply the stochastic longshore balance mo del in a data assimilation setting of longshore curren t data. (See [38], for bac kground on data assimilation, with an emphasis on geophysical applications). Since the mo del (12) is linear and Gaussian, an optimal estimator is found via least-squares, or sequentially , via Kalman filtering. W e opt for the Kalman filter. The Kalman estimator minimizes the trace of the p osterior, time dep enden t conditional probability distribution of the longshore velocity . The Kalman filter will deliver the time dep enden t ensem ble mean and v ariance of the posterior distribution of the longshore velocity , given observ ations, taking into account mo del error and observ ational errors, both assumed known. 12 -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 v'(x), m/s 0 0.5 1 1.5 2 2.5 3 3.5 Figure 9: Empirical p df for v 0 (see also Figure 5a). Figure 10: Time series of V − h V i (dashed) and model outcome v ( x, t ) − h V i at x corresponding to station v13 (solid). 13 T o clarify what this simple illustrative calculation demonstrates, w e mention the following: the state variable to b e estimated is the time history of the longshore velocity at some lo cation, given observ ations of the longshore velocity at that location. In order to make the problem more in teresting we chose to estimate the longshore velocity at station v14, which is ab out 20m further offshore than lo cation v13. Let V 14 denote the velocity at station v14. The ingredients in this exercise are, (1) the actual data V 14 , which is to b e called truth and used to assess how go o d our estimate is; (2) the mo del which is a simple discretization of the sto chastic longshore mo del, ev aluated at station v14; (3) the data , which consists of noisy longshore data V 14 , at regular time interv als. (The noise is meant to emulate measurement error. Obviously , the station data comes equipped with measuremen t errors, how ever, the inheren t v ariability of the signal do es not reflect the measuremen t error itself ). The goal is to show that the assimilation of data and the mo del pro duces a reasonable estimate of the ensem ble mean and v ariance of the distribution of V 14 . Note that the data V 14 is highly non-Gaussian in its distribution and th us higher order momen ts are not going to agree. Moreov er, this estimate should b e better than that obtained b y the mo del alone or the observ ations alone. The quality of the estimate is ev aluated here by a simple comparison to the truth data, and exp ect that a goo d estimator is close to the truth. The mo del is sto c hastic, and as suggested in Figure 10, well trained to capture the data at v13. If w e use the mo del only we will produce ensemble members that resemble those of Figure 10. At v14, the mo del yields a mean velocity estimate of h v (v14) i = 0 . 0345 m/s. The mean of the truth is h V 14 i = 0 . 0311 m/s. The mo del do es reasonably well. If we were to use the data only to estimate truth, it will largely dep end on how often we measure it and how large the measurement uncertaint y is. Next w e consider the data assimilated estimate. Let φ n b e an approximation of the longshore data at time t n . The discrete mo del for the longshore curren t and the relationship b et ween the mo del v ariable φ n and the observ ations { y m } M m =1 , resp ectiv ely , φ n +1 = pφ n + ∆ tq n + B ∆ W n , n = 0 , 1 , 2 ..., the mo del , φ m = y m + C ∆ W m , m = 1 , 2 , .., M , the data. The discrete mo del is obtained by using the simplest p ossible discretization of (12). Here, p = 1 − ∆ tc D /h , and q n = ∆ tαk sin θ A 7 /h 6 . W e take φ 0 = − a 1 + a 2 m 2 , and B = a 2 σ . The dissipation term will be omitted. In what follows we will be assuming that the discrete mo del times t n and the data times t m are commensurate. Also, we will assume that ∆ t = t n +1 − t n is constant for any n . Here ∆ W n and ∆ W m are uncorrelated normal increments with v ariances B and C , respectively , assumed time indep enden t. C is set to 0 . 1 B . The Kalman filter formulas are ˆ φ = p ˆ φ n + ∆ tq n , n = 0 , 1 , 2 , ... ˆ u = p ˆ u n p + B n , n = 0 , 1 , 2 , ... K n = ˆ u ( ˆ u + C n ) − 1 , n = 0 , 1 , 2 , ... ˆ φ n +1 = ˆ φ + K n ( y m − ˆ φ ) δ m,n , m = 0 , 1 , 2 , ... ˆ u n +1 = (1 − K n ) ˆ u, n = 0 , 1 , 2 , .... (13) where ˆ φ n and ˆ u n are estim ates of the mean and the uncertaint y , resp ectively , of v n . The ”truth” is taken as the noise-free field data, which is a 60 day record of the longshore current at station v14, during September and Octob er 1994. Figure 11 sho ws the truth, the estimate and the data, y m , which is read every 5 time steps. The v ariance u n of the p osterior is estimated to be appproximately 0.035, which compares fav orably with the (truth) data v ariance, estimated at 0 . 05. W e conclude that the assimilated product sta ys close to the truth and further, that it is statistically consistent with it. 7. Summary P arametrization usually refers to the application of empiricism rather than ”first principles” in the form ulation of some asp ect or the totality of a model of some physical pro cess. By first principles w e mean 14 time (days) 0 10 20 30 40 50 60 longshore velocity (m/s) -1.5 -1 -0.5 0 0.5 1 1.5 truth estimate data Figure 11: Estimation of the longshore velocity data (dashed) using a Kalman Filter and a simple discretization of the longshore model (12). The truth signal is field data (solid). The measurements (dots) are read every 5 time steps. The measurements has been synthetically perturbed by a normally-distributed pro cess with v ariance 10 times greater than the v ariance inherent in the sto c hastic drag parameter. fundamen tal la ws of physics, or conserv ation or axiomatic principles (such as the least action principle). P arametrization is used a great deal in problems inv olving multi-ph ysics and multi-scales and/or as a w ay to include an important phenomenon in a mo del that has not yielded to first principle explanations or that cannot b e resolved. The forces in the longshore balance mo del are in fact empirically determined, even though it has a basis in conserv ation principles of mass, momen tum, and energy . Sto chastic parametrization pro duces a type of mo del that makes sense in the ensem ble. The asp ect that is parametrized in the mo del generally do es not hav e a physical or rational basis, ho w ever, its inclusion in the mo del is critical to its fidelity . By fidelity we mean that it is consistent with data in an ensemble sense. Unlike stochastic emulators, which are also aiming for fidelit y , and in whic h structure has to be deriv ed from the data and explicitly added, a go od stochastically parametrized mo del leav es to chance as little as p ossible and derives its structure from whatev er physics is b eing captured by the mo del. In this study we purposely pic ked a simple deterministic mo del to use to illustrate ho w one go es ab out the task of parametrizing missing ph ysics via sto c hasticity . W e could hav e instead used a more sophisticated mo del for longshore currents. F or example one could start with (9)- (10), with (9) replaced by (A.8), or p erhaps use a wa v e-resolving mo del such as funw av eC ([7])). The parametrization pro cess w ould pro ceed in the same wa y . The simple longshore balance model, how ever, is simply understoo d and the role play ed by sto c hastic parametrization b etter understo o d and appreciated. In our sp ecific example the sto chasticit y w as used to represent fast v ariability that was not resolved b y the deterministic longshore balance mo del. A successful outcome of the parametrization is that the sto c hastic longshore mo del was able to displa y correlation times similar to those estimated from the data itself. Situations when stochastic parametrization may be a viable mo deling option abound. As we show ed, one suc h situation is when unresolv ed but essential physics are imp ortant to the faithful representation of observ ations via mo dels. Other situations introduce sto c hasticit y into mo del parameters. One would like to ascrib e as m uch of the phenomena being mo deled to physically-based constructs, ho wev er, in some instances one is willing to exc hange rationality for mo del robustness, or replace the notion of determinism for one in whic h ensembles make sense. With regard to mo del robustness, sto c hastic parametrization may b e a wa y to achiev e b etter consistency of sensitivity . Mo dels, particularly ones that ha ve an o v erwhelming dependence on parametrization often ha ve v ery delicate tuning of parameters and very limited ranges of ph ysical relev ance. Consistency of 15 z = -h( x ) z=0 y x z z= ζ c ( x ,t) Figure A.12: Schematic of the nearshore en vironment, z increases ab ov e the quiescent level of the sea z = 0, x := ( x, y ), and t is the (long) time v ariable. The elev ation comp onent of the free surface associated with the curren ts is z = ζ c ( x , t ). The bottom top ograph y z = − h ( x ) is referenced to the quiescent sea level height, z = 0. sensitivit y is a prop erty that allows one to assess whether the sensitivit y of a mo del outcome to changes in parameters is similar to those found in the natural problem (in the ev ent that the parameter is a physically- meaningful quan tity). The consistency of sensitivity analysis could thus b e used as a wa y to determine the parameter ranges exp ected for the exp ected sp ectrum of physical outcomes. A model that is consisten t in sensitvit y will b e applicable to a wide v ariety of ph ysical situations, using sensible or physically meaningful parameter combinations; conv ersely the analysis can also suggest when this is just not p ossible. Finally , consistency of sensitivit y could b e used to compare differen t mo dels or as another tool for empirical analysis. Practically sp eaking one can see ho w the introduction of sto c hasticit y can mak e a mo del consistent in its sensitivity , at the exp ense of introducing uncertain ty/randomness. Our claim is that it is sometimes a reasonable price to pay , esp ecially in complex models of m ulti-scale/m ulti-physics phenomena. F urthermore, the introduction of sto chasticit y , pro vided it do es not lead to a se rious loss of rationality , can b e exploited in a Ba yesian setting, wherein forecasts are replaced b y ensemble estimates and combine the sto c hasticit y of the mo del itself and the uncertainties of observ ations via Bay esian inference and data assimilation. App endix A. The V ortex F orce W a ve Curren t Interaction Model Non-w av e resolving shallow-w ater models that capture longshore currents, forced b y steady w av es and no wind, hav e 2 kno wn solution manifolds: steady longshore curren ts and unsteady ones (see [15] and references therein). The stability dep ends on the strength of the b ottom drag, namely , when the drag acceleration is prominen t, the longshore currents are steady . In what follo ws w e assume that longshore currents are nearly steady and th us we require high drag v alues in the complex mo del to simulate these. The depth-av eraged, w av e current interaction mo del in [18] is sp ecialized to the nearshore en vironment. This is a mo del for the interaction of curren ts and w av es at spatio-temporal scales muc h larger than those t ypical of the wa v es. A sc hematic of the domain, along with the co ordinate system is describ ed in Figure A.12. The transv erse co ordinates of the domain will b e denoted by x := ( x, y ). The cross-shore co ordinate is x and increases aw ay from the b eac h. Time is denoted by t ≥ 0. Differential op erators dep end only on x and t . The total w ater column depth is giv en b y H := h ( x ) + ζ c ( x , t ), where ζ c = ˆ ζ + ζ , is the comp osite sea elev ation. The sea elev ation has b een split in to its dynamic comp onen t ζ ( x , t ), and ˆ ζ , the quasi-steady sea elev ation adjustment. ˆ ζ = − A 2 k / (2 sinh(2 k H )), where A is the wa ve amplitude and k is the magnitude of the w av en umber k . The wa v e frequency σ is given by the disp ersion relationship σ 2 = g k tanh( k H ) , (A.1) 16 where g is gra vity , and the ev olution of the wa v e num b er is found by the conserv ation equation ∂ k ∂ t + ∇ ω = 0 , (A.2) where ω = k · u + σ . u ( x , t ) := ( u, v ) is the depth-av eraged velocity (current) v ector. The wa v e amplitude A is found b y solving for the wa v e action W := 1 2 σ ρg A 2 , (A.3) via the action equation, ∂ W ∂ t + ∇ · ( W c G ) = − σ , (A.4) where ρ is the fluid density . The wa ve action dissipation rate is captured by − σ . The group velocity is c G = u + C G , with C G giv en by C G = σ 2 k 2 1 + 2 k H sinh(2 k H ) k . (A.5) The con tinuit y equation is giv en by ∂ H ∂ t + ∇ · [ H ( u + u st )] = 0 , (A.6) where u st := ( u st , v st ) = 1 ρH W k , (A.7) is the Stok es drift velocity . The v elo cit y u is found via the momentum equation ∂ u ∂ t + ( u · ∇ ) u + g ∇ ζ − J = S + N + B − D . (A.8) The v ortex force term (see [32]) is J = − ˆ z × u st χ, where χ is the v orticity , and ˆ z is the unit vector pointing an ti-parallel to gravit y . The terms on the righ t hand side of (A.8) mo del several physical pro cesses critical to nearshore wa ve- curren t conditions, none of which ha ve generally agreed-upon parametrizations: S and N represent the depth-a veraged wind stress and sub-scale pro cesses asso ciated with viscous dissipation, resp ectively . W av e- to-curren t momentum exchanges due to the breaking wa ves are captured by B = k ρH σ . There are sev eral empirical form ulations for ( ≥ 0). The one w e adopt here is due to [27]. (See also [34]). It is = 24 √ π ρg B 3 r γ 4 H 5 σ 2 π A 7 , (A.9) with B r , γ , empirical parameters. This empirical relationship based up on hydraulic theory and has b een fit and tested against data in nearshore en vironments similar to the nearshore case considered in this pap er. The depth-a veraged b ottom drag is D = τ ρH , where τ = ρc D u , (A.10) 17 where c D = c f | u w | = 2 π ˜ c f | u w | is the b ottom dr ag parameter. | u w | is the w av e orbital velocity , estimated near the b ottom top ograph y , and ˜ c f ≥ 0 the friction co efficient. In this particular b ottom drag parametrization the friction co efficient ˜ c f (or the drag parameter c D itself ) needs to be calibrated/empirically determined. It is assumed that | u w | is m uch larger that | u | (See [39], Chapter 5) and exhibits inherent v ariabilit y at time scales of the wa ves, whic h are shorter the v ariability of the curren ts. This form of the b ottom drag represen ts the most limited and simplest p ossible parametrization (we will purp osely c ho ose this parametrization for this exercise and stochastic parametrization, but other models could b e used: The mo dels of Soulsb y [40, 41] and F eddersen and co-work ers [29] are alternativ es, the latter in fact has been tuned to conditions presen t in Duc k NC. (See also [15] for a comparison of these different drag mo dels). App endix A.1. The L ongshor e Curr ent Balanc e Mo del Similar assumptions are made in the deriv ation of this balance mo del as were made in connection with deriving (1). The longshore current v does not hav e y dep endence. The wa ve-to-curren t momentum transfer due to wa v e breaking B is retained, as is the N . Wind stresses are ignored, hence S is omitted. The crux of the deriv ation of a balance mo del for longshore currents, based up on the vortex force formulation of w av e-curren ts, is the observ ation that the depth-a veraged normal comp onen t of the velocity at the shore m ust b e zero, and hence u = − u S t . Also for steady currents, the vortex force and the inertial terms balance, pro vided that the only con tribution to the currents are w av e-induced, i.e. , there are no remotely imp osed curren ts or wind stresses to account for. The simple longshore momentum balance will be ∂ v ∂ t ≈ − c D v h + α β B h 6 + N 1 h ∂ ∂ x p g hh ∂ v ∂ x , (A.11) where α := 12 / √ π g B 3 r /γ 4 ≥ 0 , β B := A 7 k sin( θ ) . The w a ven umber magnitude is k , the sea elev ation is A , and g is gra vity . B r and γ are parameters associated with w av e breaking and sea elev ation, resp ectiv ely . When we further assume that ∂ v /∂ t = 0 in (A.11) we obtain the v ortex force longshore balance mo del, (2). Ac kno wledgments W e received funding from GoMRI/BP . JR and SV also received funding from NSF-DMS-1109856. W e wish to thank Prof. F alk F eddersen, for discussions on current longshore mo dels. Several suggestions by the referees impro v ed the paper. JR also thanks the J. T. Oden F ellowship program at U. T exas, Austin, and the Asp en Center for Physics. The Asp en Cen ter of Ph ysics is supported, in part, by the National Science F oundation under Grant No. PHYS-1066293. References [1] S. J. Lentz, M. R. F ewings, The wind- and wa ve-driv en inner shelf circulation, Annual Review of Marine Sciences 4 (2012) 317–343. [2] Q. Chen, J. T. Kirby , R. A. Dalrymple, F. Shi, E. B. Thornton, Boussinesq mo deling of longshore currents, Journal of Geophysical Research, Oceans ‘08 (2003) C113362. [3] J. Choi, J. T. Kirby , S. B. Y oon, Boussinesq modeling of longshore currents in the SandyDuck experiment under directional random w a ve conditions, Coastal Engineering 101 (2015) 17–34. [4] T. J. .Noy es, R. T. Guza, S. Elgar, T. H. C. Herbers, Field observ ations of shear wa ves in the surf zone, Journal of Geophysical Research, Oceans 109 (2004) C01031. [5] T. J. .Noy es, R. T. Guza, F. F eddersen, S. Elgar, T. H. C. Herbers, Mo del-data comparisons of shear wa ves in the nearshore, Journal of Geoph ysical Researc h, Oceans 110 (2005) C05019. [6] R. Cienfuegos, E. Barth´ elemy , P . Bonneton, W av e-breaking mo del for Boussinesq-t yp e equations including roller effects in the mass conserv ation equation, Journal of W aterwa y , P ort, Coastal, and Ocean Engineering 136 (2010) 10–26. [7] F. F eddersen, The generation of surfzone eddies in a strong alongshore current, Journal of Physical Oceanography 44 (2014) 600–614. [8] F. F eddersen, Breaking wa ve induced cross-shore tracer dispersion in the surfzone: Model results and scalings, Journal of Geophysical Research, Oceans 112 (2007) C09012. doi:10.1029/2006JC004006 . 18 [9] S. Suanda, F. F eddersen, A self-similar scaling for cross-shelf exchange driven by transient rip currents, Geophysical Research Letters doi:10.1002/2015GL063944 . [10] O. Nwogu, Alternative form of Boussinesq equations for nearshore wa ve propagation, Journal of W aterwa ys P orts and Coastal Ocean Engineering 119 (1993) 618638. [11] A. B. Kennedy , Q. H. Chen, J. T. Kirby , R. A. Dalrymple, Boussinesq mo deling of wa ve transformation, breaking and runup. I: One dimension, Journal of W aterwa ys P orts and Coastal Ocean Engineering 126 (2000) 39–47. [12] P . Lynett, Nearshore mo deling using high-order Boussinesq equations, Journal of W aterways Ports and Coastal Ocean Engineering 132 (2006) 348–357. [13] J. Allen, P . Newb erger, R. Holman, Nonlinear shear instabilities of alongshore currents on plane b eac hes, Journal of Fluid Mechanics 310 (1996) 181–213. [14] H. T. Ozk an-Haller, J. T. Kirby , Nonlinear evolution of shear instabilities of the longshore current: A comparison of observ ations and computations, Journal of Geoph ysical Research, Oceans 104 (1999) C11, 25953–25984. [15] Y. Uc hiyama, J. C. McWilliams, J. M. Restrep o, W av e-current interaction in nearshore shear instabilit y analyzed with a Vortex Force formalism, Journal of Geophysical Research (2009) C06021 doi:doi:10.1029/2008JC005135 . [16] C. Currin, T. Mitchell, M. Morris, D. Ylvisaker, Ba yesian prediction of deterministic functions, with applications to the design and analysis of computer exp erimen ts, Journal of the American Statistical Association 86 (1991) 953?963. [17] A. Bensoussan, J. Lions, G. P apanicolaou, Asymptotic Analysis for Periodic Structures, North-Holland, Amsterdam, 1978. [18] J. C. McWilliams, J. M. Restrep o, E. M. Lane, An asymptotic theory for the interaction of w av es and curren ts in coastal waters, Journal of Fluid Mechanics 511 (2004) 135–178. [19] E. M. Lane, J. M. Restrep o, J. C. McWilliams, W av e-current interaction: A comparison of radiation-stress and v ortex-force representations, Journal of Ph ysical Oceanograph y 37 (2007) 1122–1141. [20] B. W eir, Y. Uc hiyama, E. Lane, J. M. Restrep o, J. C. McWilliams, A Vortex Force analysis of the interaction of rip currents and surface gra vity wav es, Journal of Geophysical Research 116 (2011) C050001. [21] S. Elgar, T. H. C. Herbers, R. T. Guza, Reflection of ocean surface gravit y w av es from a natural beach, Journal of Ph ysical Oceanography 24 (1994) 1503–1511. [22] M. S. Longuet-Higgins, Longshore currents generated b y obliquely incident sea w a ves, 1, Journal of Geophysical Research 75 (1970) 6778–6789. [23] M. S. Longuet-Higgins, Longshore currents generated b y obliquely incident sea w a ves, 2, Journal of Geophysical Research 75 (1970) 6790–6801. [24] M. S. Longuet-Higgins, R. W. Stewart, Changes in form of short gra vity wa ves on long tidal w av es and tidal currents, Journal of Fluid Mec hanics 8 (1960) 565–583. [25] M. S. Longuet-Higgins, R. W. Stewart, The c hanges in amplitude of short gra vity wa ves on steady non-uniform curren ts, Journal of Fluid Mec hanics 10 (1961) 529–549. [26] B. G. Ruessink, J. . R. Miles, F. F eddersen, R. T. Guza, S. Elgar, Mo deling the alongshore curren t on barred b eaches, Journal of Geophysical Research, Oceans 106 (2001) 22451–22463O. [27] E. B. Thorn ton, R. T. Guza, T ransformation of wa v e height distribution, Journal of Geophysical Research, C10 88 (1983) 5925–5938. [28] J. C. Churc h, E. B. Thorn ton, Effects of breaking wa v e induced turbulence within a longshore current mo del, Coastal Engineering 20 (1993) 1–28. [29] F. F eddersen, R. Guza, S. Elgar, T. Herbers, V elo city moments in alongshore b ottom stress parameterizations, Journal of Geophysical Research, Oceans 105 (2000) 86738686. [30] E. Lane, S. P eaco c k, J. M. Restrep o, A dynamic-flow carb on-cycle b o x model and high-latitude sensitivity , T ellus B 58 (2006) 257–278. [31] B. S. Everitt, D. J. Hand, Finite Mixture Distributions, Chapman and Hall, Bo ca Raton, FL, 1981. [32] J. C. McWilliams, J. M. Restrep o, The wav e-driven o cean circulation, Journal of Ph ysical Oceanography 29 (1999) 2523– 2540. [33] C. M. Bishop, Pattern Recognition and Machine Learning, Springer, New Y ork, 2006. [34] E. B. Thorn ton, R. T. Guza, Surf zone longshore currents and random w av es: Field data and mo dels, Journal of Physical Oceanography 16 (1986) 1165–1178. [35] J. M. Restrepo, W ave breaking dissipation in the wa v e-driven o cean circulation, Journal of Physical Oceanography 37 (2007) 1749–1763. [36] C. P . Robert, G. Casella, Monte Carlo Statistical Metho ds, 2nd Edition, Springer-V erlag, New Y ork, 2004. [37] A. Alexanderian, J. Winokur, I. Sra j, A. Sriniv asan, M. Isk andarani, W. C. Thac ker, O. M. Knio, Global sensitivity analysis in an ocean general circulation mo del: a sparse spectral pro jection approach, Computational Geoscience 16 (2012) 757–778. doi:10.1007/s10596- 012- 9286- 2 . [38] C. W unsch, The Ocean Circulation Inv erse Problem, Cambridge Univ ersit y Press, Cambridge, UK, 1996. [39] J. F redso e, R. Deigaard, Mec hanics of Coastal Sedimen t T ransp ort, W orld Scien tific, 1992. [40] M. Stive, Adv ances in Coastal Morpho dynamics: An Ov erview of the G8-Coastal Morpho dynamics Pro ject; Europ ean Union, Septem ber 1992 to Nov ember 1995, Delft Hydraulics, 1995. [41] R. L. Soulsby , Dynamics of Marine Sands, A Man ual for Practical Applications, Thomas T elford, 1997. 19
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment