Link Delay Estimation via Expander Graphs
One of the purposes of network tomography is to infer the status of parameters (e.g., delay) for the links inside a network through end-to-end probing between (external) boundary nodes along predetermined routes. In this work, we apply concepts from …
Authors: Mohammad H. Firooz, Sumit Roy
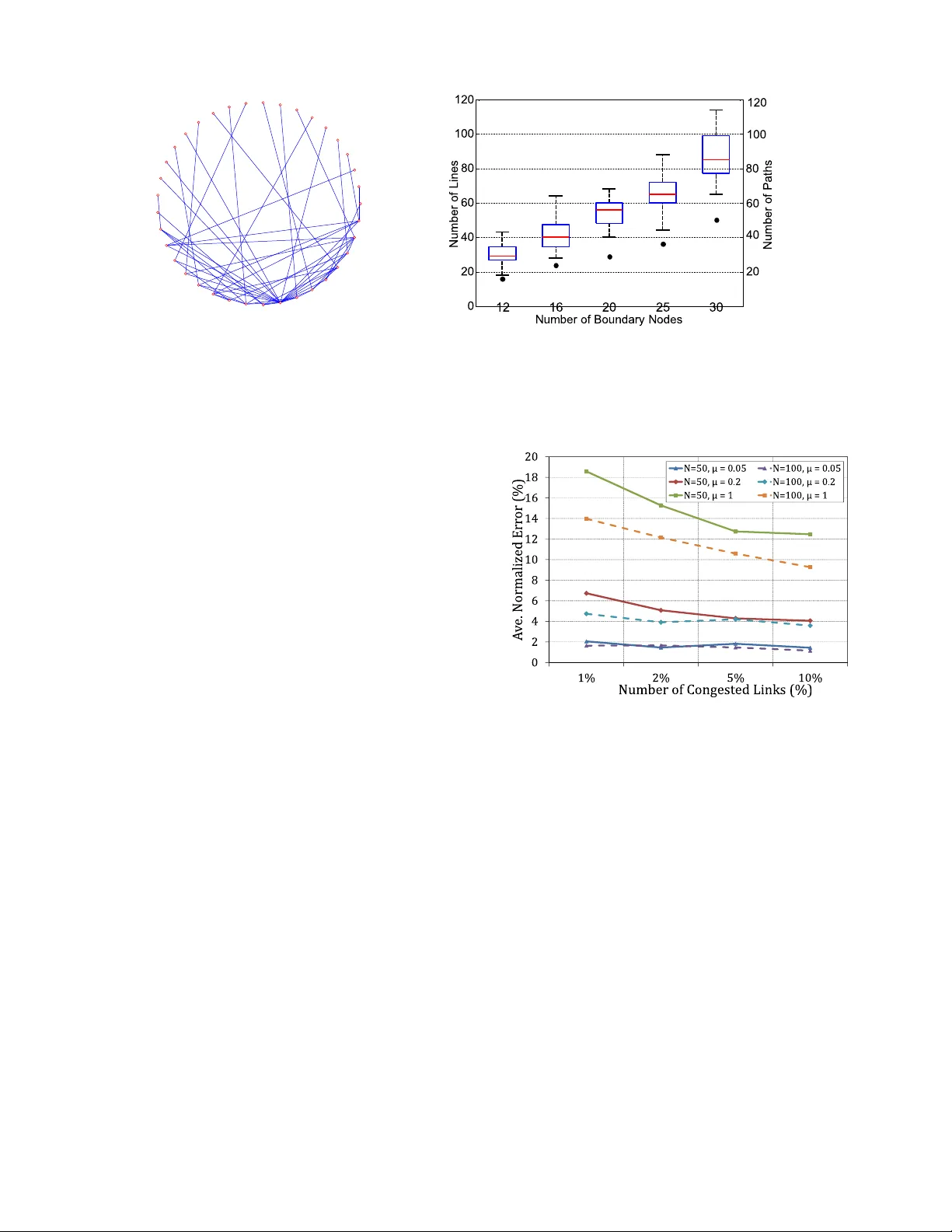
1 Link Delay Estimation via Expander Graphs Mohammad Hamed Firooz, Member , IEEE, Sumit Roy , F ellow , IEEE, Abstract —One of the purposes of network tomograph y is to infer the status of parameters (e.g., delay) f or the links inside a network through end-to-end probing between (external) boundary nodes along predetermined routes. In this work, we apply concepts from compressed sensing and expander graphs to the delay estimation problem. W e first show that a relative majority of network topologies are not expand ers fo r existing expansion criteria. Motivated by this challenge, we then relax such criteria, enabling us to acqu ire simulation evidence that link delays can be estimated f or 30% more n etworks. Th at i s, our relaxa tion expands the list of iden tifiable networks with bound ed estimation error by 30%. W e conduct a simulation performa nce analysis of d elay estimation and congestion detection on the basis of l 1 minimization, demonstrating that accurate estimation is feasible for an incr easing proportion of networks. Index T erms —Netwo rk T omogr aphy , Delay Esti mation, Com- pressed Sen sing, Expander Graphs, l 1 minimization I . I N T RO D U C T I O N Monitorin g of link pro perties (d elay , loss rates, etc.) in networks con tinues to b e an integral requirem ent within any network management fram ew o rk as part of monitorin g its utilization and perf ormance . Th e need for accurate and fast monitorin g schemes has escalated in recent years d ue to the in creasing popu larity of n ew resource-c onsuming services (such as vid eo-con ferencing , V oice over IP , an d o nline games) that require quality-o f-service (Qo S) guarantees [1], [2]. The primary ob jectiv e of this pap er is to demon strate h ow co m- pressed sensing ideas m ay be applied to d erive a fast delay monitorin g a lgorithm th at o utperfo rms other schemes. The term network tomography was used in [3] to enco mpass a class of app roaches that seek to infe r the internal lin k status from en d-to-en d measuremen ts [4], [5]. A useful cla ssification of network tom ograph y methods for ou r purposes is as fo llows [6]: • Cooperative Internal Nodes: This m ethod assumes that internal node s on probe routes respon d to contr ol packets. For example, activ e too ls such as a ping or a trace r oute, measure an d repo rt attributes of th e ro und-tr ip p ath fr om a sender to th e internal node based o n probe packets [7]. Beside comp lexity , the challeng es of such methods arise from the fact that service pr oviders do n ot own the entire network that is being p robed and h ence do no t have access to the d esired inter nal n odes for appro priate configur ation [8], [9], [1 0]. • End-to-End: I n network s with a d efined b ound ary , it is assumed that a ccess is available to nod es at the edge (but not to any in the inter ior). A bound ary no de sen ds pr obes Authors are with the Department of Electri cal Engineeri ng, Uni versity of W ashington, Seattle, W A, 98195 USA. e-mail: { firooz,sroy } @u.washi ngton.edu This work was supported in part from AFOSR under Grant F A9550-0 9-1- 0298 to all (or a subset o f) other bound ary nod es to me asure packet attributes o n th e path between network end points. These edg e-based metho ds do not require exchan ging control messages with any interior nodes. The primar y challenge confro nting such en d-to-en d probe- based link status estimation is that of identifiability , as discussed below [11], [ 12], [1]. As the networks e volve to ward mor e decentralized, uncoopera- ti ve, and heterogeneou s administrati ve (sub)domain s, the av ail- ability o f c ooperative interior nodes is increasin gly limited. Hence, e nd-to- end network d iagnostic to ols attract increasing attention. Designing an end -to-end ne twork tom ograph y p rotocol can be based on two d ifferent consideration s: (1) h ow to c reate a routing matrix R so that it covers the entir e network; and ( 2) considerin g the routing matrix R , how to estimate the desired attributes (e.g., link delay) o f th e n etwork. The first issue is referred to in the literature as network coverage; two well- known algorithm s are th ose th at use multiple grap hs an d so lve integer p rogram ming o ptimization [13], [14], [15]. In this paper, we foc us on the secon d issue with the assumptio n th at the rou ting matrix of the n etwork is alr eady given (a situation that holds in many pr actical examp les). In ou r simu lation, we use the shortest path as on e o f the possibilities fo r cr eating the routing matr ix R , but any o ther meth od is acceptable. V arying the ty pe of method used do es no t affect the effectiveness of the algo rithm. For param eters such as delay , an additive line ar mo del adequately represen ts the relation ship between a m easured path an d an individual link delay [16], [13], i. e., y = Rx , (1) where x is the n × 1 (unk nown) vector of the ind ividual lin k mean dela y . The r × n bin ary matrix R is the r outing matrix for the network grap h cor respond ing to the path s cho sen for the p robes (ea ch row of the matrix correspo nd to a path ), and y ∈ R r is the measured r -vector of end-to -end path delay s. Although the focus of this pap er is lin k delay , our appro ach readily applies to any other link attributes (such as log of packet loss rate ), allowing such a line ar relationship with en d- to-end m easurements. In Eq. (1), usually , the numb er of ob servations r is muc h less than the n umber of variables n (i.e. , r ≪ n ) because the number of acc essible bo undary nodes is m uch smaller than the number of links inside the network . Th us, the number of vari- ables in Eq. (1) to be estimated is mu ch larger than the number of equ ations [17], leadin g to the generic no nuniqu eness of solutions to Eq. (1), i.e., the inability to uniq uely d etermine link delay fro m en d-to-en d measurem ents [18]. However , the problem of iden tifying o nly th e (few) links with large d elays (also known as con gested links) sugg ests the possibility of 2 improved mechanisms to solve the u nder-determined system in Eq . ( 1), pr ovided that the sp arsity of the desired solutio n can be explo ited. In othe r words, we are interested in solu tions x with only a few , up to k , large entr ies. If a ll th e o ther e ntries are small but n on-zero , we r efer to such vector as nea rly k - sparse , an d if they are exactly zero we call it e xa ctly k - sparse . Clearly , if vector x is exactly k - sparse, it is a lso nea rly k - sparse. T he appro priate definition that applies between nearly k -sparse and k -spa rse will be clear from the co ntext. Definition 1. A network is k - identifiab le if for every exactly k -sparse delay vector x , Eq. ( 1) is uniquely solva ble. Compressed sensing [ 19], [20], [ 21] ha s b een pr oposed recently for network tomograp hy [22], [23], [24] as part of methods that vary significantly in their underlying assumptions and utility for practical networking scen arios. Authors in [22] u sed comp ressed sensing to estimate lin k d elays o f the unobser ved links on an en d-to-en d path when measured d ata is av ailab le on a sub set o f links . Xu et. al. [2 3] applied compressed sensing by p erform ing a standard random walk over a su fficiently connec ted g raph to take m easuremen ts. Howe ver, this is at variance with typical network scenarios where the measurement m atrix ( i.e., r outing matrix) is alr eady giv en. Besides, mo st networks are not sufficiently con nected [25], [26]. In this work we assume that th e ro uting path between any pair of bo undary nodes is pre determined witho ut any con straint on th e underly ing network topo logy . This work applies th e concep ts of expander g raphs to the network tomo graphy p roblem along with comp ressed sensing based link delay estimatio n. This is achieved by fun damentally relating the network ro uting matrix to a bipartite grap h. If the bip artite graph is an expander graph , the n one can u se l 1 minimization to solve Eq. (1 ) for near ly k -sparse delay vector x , that h as polyno mial complexity in n , in depend ent of k [27]. A. Con tributions and Organization Our specific c ontributions are as f ollows. W e first focu s on 1-identifiab le network s for th e resulting intu ition it genera tes. W e relax the existing expansion result fr om ǫ < 1 / 6 to ǫ ≤ 1 / 4 (Lemma 1) and extend ou r result to bipartite graph s that are a union of subg raphs, whic h are the mselves expand ers in Theorem 2. Finally , in Theorems 3 and 4 we show th at for general k-iden tifiability , an inequ ality similar to 1- identifiable networks ho lds on average. W e cond uct extensive simulatio n testing to show that the new results b roaden the set o f poten tial expan ders (b y up to 30%) at the co st of accepting slightly larger error margin in reconstruc tion for the gene ral k case (Theor ems 3 and 4) . W e derive the estimation erro r bou nd for l 1 minimization , and validate it via simulation results. From th e resu lts, it is evi- dent th at LP optimiz ation und er the n ew pr oposed cond itions achieves better estimatio n accu racy as compared to techniqu es presented in the literatur e [2 8], [29]. This is d ue to the fact that o ur app roach takes into accou nt the in herent sparsity in the delay vector . The rest of the paper is organized as follows: Sec tion II relates the routing matrix of a network to bip artite g raphs. ( a ) ( b ) Fig. 1. (a) A network with 4 boundary nodes, 2 intermediate nodes and 5 links, (b) Bipa rtite graph corresponding to giv en routin g matrix in Eq. (3) Section III establishes a con nection between link delay estima- tion an d binary com pressed sensing and identifies cond itions on the n etwork r outing matrix under wh ich a giv e n n etwork is k -identifiab le. W e ev aluate o ur appr oach using simulations in Section IV an d the p aper co ncludes with r eflections on f uture work in Section V. In the Ap pendix , we p rovide the proofs of the theo rems. Notations : we use b old cap itals (e.g ., R ) to rep resent matrices a nd bold lowercase symb ols (e.g., x ) f or vectors. The i -th en try o f a vector x is denoted b y x i . For the matrix R , N ( R ) denotes its null space, a nd superscript t denotes its tr anspose. Bold calligraph ic ca pitalized symb ols ( e.g., I ) represents random variables. A set is den oted by a n ormal capital (e. g., V ) and a set of sets is pr esented by calligrap hic capitalized symbo l ( e.g., R ) which is the set of all end-to- end paths in the n etwork. |R| is the car dinality o f the set. An empty set is d enoted by ∅ . U \ A shows the set difference o f U an d A . deg ( v ) indicates degree of the no de v in a grap h, defined as n umber of no des it is co nnected to. For any set S ⊂ { 1 , 2 , . . . , n } , S c represents the complem ent. Also, for any vector x ∈ R n , vector x S ∈ R n has entries defined as follows: ( x S ) i = ( x i if i ∈ S 0 o.w . . (2) If x ∈ R n , the l p -norm of x , for p ≥ 1 is d efined as k x k p = ( P n i =1 | x i | p ) 1 p . I I . R O U T I N G M AT R I X A N D B I PA RT I T E G R A P H As is customary , a network con sisting of bidirectional links co nnecting tra nsmitters, switches, and r eceiv e rs can be modeled as an undirected graph N ( V , E ) , wh ere V ( E ) is the set of vertices (ed ges). T hroug hout the m anuscript, boun dary nodes a re depicted as solid circles, while interme diate no des are presented using d ashed cir cles. W e use network d epicted in Figur e 1-( a) to illustrate the subsequen t d efinitions. A bipartite gr aph is o ne who se vertices can be divided into two disjoint sets, X and Y , so that e very edge co nnects a vertex in X to on e in Y [30]. It is usually repr esented as a triple G ( X , Y , H ) , where H ⊂ X × Y is a set with paired elements f rom X an d Y . The vertex sets X and Y are the left and right sides of th e grap h, respectively . A b ipartite g raph G ( X, Y , H ) can b e repr esented by its bi-ad jacency m atrix A = [ a ij ] , where a ij = 1 if n ode i ∈ Y is con nected to node j ∈ X , and is zero o therwise. By d efinition, the elem ents 3 in a r ow of a bi-adjac ency matrix A correspo nd to Y (right- hand side of the graph ) and elements of column s co rrespon d to X (left-han d side of the graph). This co n ven tion is used throug hout the p aper . Assume th at a gi ven network N ( V , E ) has a total of n lin ks (i.e., n = | E | ) , a nd R is the (given) set of paths betwe en the bound ary nodes of th e n etwork and r = |R| . Let R r × n denote the rou ting matrix corr espondin g to the set R . For example, for the 1 -identifiable network in Figu re 1-(a), supp ose the following routing m atrix is given: R = P 1 : n 2 n 6 P 2 : n 1 n 5 P 3 : n 1 n 2 P 4 : n 5 n 6 l 1 l 2 l 3 l 4 l 5 1 0 1 1 0 0 1 1 0 1 1 1 0 0 0 0 0 0 1 1 , (3) which is equ iv alent to the following set of paths R : R = { l 1 l 3 l 4 , l 2 l 3 l 5 , l 1 l 2 , l 4 l 5 } . (4) R r × n can be viewed as a b i-adjacency m atrix of a bipartite graph G ( X , Y , H ) , wh ere X = E (set o f lin ks in the n etwork) and Y = R (set of g iv en paths in the network) . Th ere exists a connectio n between a node in X and a node in Y if a p ath in R includ es the corr espondin g lin k in E . Fig ure 1-(b) pr esents the bipartite graph fo r the network in Figure 1-(a) with the routing m atrix R in Eq. (3). Note that the ab ove ro uting matrix, or its equ i valent set of paths, is not a complete set of ro utes fo r th e network in Figur e 1-(a) (e. g., it does not in clude the path from n 1 to n 6 , which is l 2 l 3 l 4 ). However , it is ty pically a fundam ental prem ise in network tomogr aphy th at the routing matrix is already chosen and may not be cha nged. H ence, we seek to investigate the following qu estion: Assum ing that the routing m atrix is given, is it p ossible to estimate link delays? I I I . E X PA N D E R G R A P H S A N D N E T W O R K I D E N T I FI A B I L I T Y In recent years, a new a pproach – Compress e d S ensing –f or estimating an n -dimen sional (sign al) vector x f rom a lower- dimensiona l r epresentation has attracted mu ch attentio n [21], [31], [20]. For any signal x ∈ R n , the reduced dimension representatio n is equal to y = Ax , where m × n matrix A ( m ≪ n ) is referr ed to as the measurement matrix . The main challenge in tradition al com pressed sensing is to con struct A with the following desirable (and conflicting) pr operties: (a) achieve maximum possible comp ression ( m/n small) and yet allow (b) an accurate r econstructio n of x from y wh en x is known to b e sparse using (c) a fast decod ing alg orithm [32], [33], [ 34], [3 5]. As d iscussed above, the routing matrix of a ne twork is the measuremen t matrix for delay tomog raphy app lication, and in most scenarios it is prede termined. The main issue, theref ore, is to d etermine wh ether it is an ap pr opriate measu rement matrix fo r comp ressed sensing, i.e., if it satisfies ob jecti ve ( b) above. In the simulation section , we sho w that the existing condition s for the measu rement matrix do no t app ly to mo st of the routing matrice s. M otiv ated b y th is o bservation, we aim to revisit these con ditions and mod ify them so that they be come more suitable to th e network to mograp hy pr oblem. A. Ex pander Graphs Definition 2. A left d -r egular b ipartite graph G ( X , Y , H ) ; i.e., deg ( v ) = d ∀ v ∈ X , is a ( φ, d, ǫ ) -expander if for a ny Φ ⊂ X with | Φ | ≤ φ , the following cond ition holds: | N (Φ) | ≥ (1 − ǫ ) d | Φ | , (5) wher e N (Φ) is a set of neigh bors of Φ . Neigh bors of Φ are nodes which are con nected to a t least one of the n odes in Φ . φ and ǫ ar e the “expansion fa ctor” a nd the “err or parameter , ” r espectively . In an expander grap h, the d egree o f co nnectivity for a set o f nodes (with cardina lity of up to φ ) o n the left-han d side ( X ) expands by the factor (1 − ǫ ) d o n the right-h and side ( Y ) [ 36]. Expand er g raphs ar e well-stud ied; in a key result, Berind e and I ndyk in [37], [27] show that the bi-adjac ency matrix of a (2 φ, d, ǫ ) -expander gr aph can be used as the measure ment matrix for a φ -spar se signal, fo r ǫ < 1 6 . The p arameter ǫ in an expan der gra ph is a de sign variable tha t is related to recovery error . The existing results for a bipartite graph to be an expander re quire ǫ < 1 / 6 , which, as we will show , does n ot ap ply to most n etworks. For the network tom ograph y problem , the measurement matrix is usually pr e-determin ed, and we nee d to enlarge the boun d on ǫ so as to incr ease the likelihood that it leads to an iden tifiable ne twork. The bipartite graph in Figure 1-(b) correspon ds to the 1- identifiable network in Figure 1 -(a) with th e ro uting matrix in Eq. (3). I t is e asy to see that this bip artite graph is an expan der for ǫ = 1 / 4 . Motiv ated by this examp le, we r elax the existing result for ǫ < 1 / 6 to ǫ ≤ 1 / 4 . In the simulation r esults (Section IV -B), we show that th is relaxation increases the numb er of k -identifiab le networks that satisfy the expansion pro perty . For networks th at satisfy the expan sion prop erty , LP o ptimization can be used to solve the to mograp hy pr oblem. The ana lytical results are first deriv ed for 1- identifiable network s and then generalized to k > 1 -identifiability . B. 1 -identifia bility Consider a network N ( V , E ) with a r outing matrix R that satisfies th e expansion proper ty of a (2 , d, ǫ ) -expander grap h. Now , let u s c onsider two links th at constitute two nod es on the lef t-hand side of b ipartite grap h G ( E , R , H ) ; i.e., | Φ | = 2 . As indicated b y the de finition of expander gr aphs in Eq . (5), the n umber o f n odes on the right-hand side connected to these two nod es is 2 d (1 − ǫ ) . I f the two lef t nodes are conn ected to exactly the same nodes o n the rig ht-hand side, distinguishin g between them is impossible, and th e bi-adjacency matr ix R is rank deficient. Ide ntifying the correct congested link req uires that the n umber of pa ths passing thr ough these two links be greater than d . Thus, 2 d (1 − ǫ ) ≥ d + 1 fo r any d , which for d = 2 imp lies ǫ ≤ 1 4 . W e exclude case of d = 1 because each left 1-regular bipartite gr aph with N (Φ) ≥ 2 is an expan der graph. Follo win g the a bove, Lemma 1 p rovides an upp er bound o n the error of recovering x fr om its lo wer-dimensional projection Ax when A is a b i-adjacency matrix of a (2 , d, ǫ ) -expander graph an d ǫ ≤ 1 / 4 . 4 Lemma 1. Let A be a bi-ad jacency matrix of a (2 , d, ǫ ) - expander graph with ǫ ≤ 1 / 4 . Consider a ny two vectors, x and x ′ , with the same pr oje ction und er the measu r ement ma trix A , i.e., Ax = Ax ′ . Assume that x is 1-spa rse and without loss of generality , k x ′ k 1 ≤k x k 1 . Let S be the singleton set of the lar gest ( in magnitude) element of x . Then, k x ′ − x k 1 ≤ f ( ǫ ) k x S c k 1 , (6) wher e f ( ǫ ) = 2(1 + 2 ǫ ) 1 − 2 ǫ , ǫ ≤ 1 4 . (7) Pr oof : see App endix 1 . The above lemma suggests that un der some cond itions, the link delay in a network may be corr ectly e stimated fr om the m easuremen ts r epresented by Eq. ( 1). I f x ′ represents the estimate (via a suitable algorithm ) of the true ( unkn own) delays x , the lemma sug gests that the estimatio n erro r is approp riately b ound ed, whenever th e m easurement matr ix A is a bi- adjacency matrix o f an expan der graph. The following theo rem relates th e problem of delay estima- tion in a network N ( V , E ) to results on expand er g raphs with ǫ ≤ 1 / 4 a nd shows that E q. ( 1) can be solved for x u sing LP optimization . Theorem 1. Let N ( V , E ) be a network with a set of pa ths R a nd a co rr espon ding r outing matrix R r × n . Suppose th at G ( E , R , H ) is a bipa rtite graph with bi- adjacen cy matrix R . Assume that x is the true ( unknown ) 1- sparse dela y vector of N ( V , E ) a nd y = Rx is the (given) end-to -end delay mea sur emen t. Let x ′ be a solutio n to the following LP optimization: min k x ′ k 1 (8) s.t. Rx ′ = y . Then, k x − x ′ k 1 ≤ f ( ǫ ) k x S c k 1 , (9) if G is a (2 , d, ǫ ) -expander with ǫ ≤ 1 4 . Pr oof : see App endix. Note that if the tru e delay vector x is exactly 1-spa rse (which rarely occurs), it implies that k x S c k 1 = 0 , which means that x ′ = x ; i.e., l 1 -norm minimiza tion in Eq. ( 8) can recover x with zero estimation error . In other words, if th e delay of all links in the network is zero except f or one, the delay of that link can be exactly recovered from the end-to-en d delay measu rement. However , if the tru e d elay vector co ntains links with small but n onzero dela ys (th e mo re likely scen ario), the ab ove theore m yields an upper bound on th e estimation error . Relaxing d -re gularity Condition : our result r equires ex- pander graph s that are left d -regular . Ho wever , th ere exists networks which ar e 1 -identifiab le, but their correspondin g 1 In [37], [27], this function is deri ved as f ( ǫ ) = 2(1 − 2 ǫ ) 1 − 6 ǫ ; thus, it requi res ǫ < 1 6 . (a) (b) Fig. 2. An example of 1-identifiable network whose correspond ing bipa rtite graph is not left regular . (a) Network topology (b) Bipartite graph corr espond- ing to the routing matrix R in Eq. (10) (a) (b) Fig. 3. T wo subgraphs of the bipart ite graph in Figure 2-(b) which are left regul ar . bipartite graphs are not left d -regular , suggesting that the above result is sufficient but not necessary . A n example o f such a network is dep icted in Figure 2-( a) with the following routing matrix: R = P 1 : n 1 n 2 P 2 : n 1 n 3 P 3 : n 2 n 3 l 1 l 2 l 3 l 4 l 5 l 6 1 1 0 0 1 0 1 0 1 0 0 1 0 0 0 1 1 1 . (10) The a bove r outing m atrix is a bi-adjace ncy matr ix of the bipartite gra ph presented in Figure 2-(b ). This b ipartite grap h is not left regular becau se the d egree of a node in the left set is eith er 1 or 2 ; th us, it ca nnot be an expan der . Howev er , Figures 3-(a) and (b), respectively , repre sent subgr aphs o f G with regular lef t d egree 1 an d 2 ; th ese subg raphs ar e expander graphs. The ab ove observation sugg ests th at the re sult in Theorem 1 may be extended to network s whose cor respondin g bipartite graph is n ot regular (and is therefo re not an expander) but can be p artitioned into disjoin t un ion of su bgraph s that are themselves expand er g raphs. Theorem 2. Let N ( V , E ) be a network with r o uting ma trix R r × n . Let G ( X, Y , H ) be a bipa rtite graph with bi-adja cency matrix R . Su ppose that G i ( X i , Y , H i ) , i = 1 , 2 , . . . , M , a r e d i -r egular b ipartite sub graphs of G su ch that • X = ∪ X i and X i ∩ X j = ∅ for i 6 = j • H = ∪ H i • d i 6 = d j for i 6 = j Then, N ( V , E ) is 1 -identifia ble if G i is a (2 , d i , ǫ ) -expander graph with ǫ ≤ 1 4 , i = 1 , 2 , . . . , M . Fu rther , th e link delay is 5 the solution to the LP optimization in Eq. (8) . Pr oof : see App endix. For future r eference, we refer to the cond itions in Th eorem 2 as 1-identifia bility expansion con ditions . If th e network N ( V , E ) satisfies these co nditions, we ref er to it as the 1 - identifiab le expander n etwork . The co nditions in Theorem 2 imply the fo llowing fo r any link p air l i and l j : • They belo ng to different G i ’ s and h ence have d ifferent degrees deg ( l i ) 6 = deg ( l j ) . • They belong to the sam e sub graph G i , i.e., deg ( l i ) = deg ( l j ) = d i . In that case, because G i is a bipartite graph, they satisfy th e expansion prope rty in E q. (5 ). W e state this o bservation fo rmally in the f ollowing coro llary . Corollary 1. Let N ( V , E ) be a 1-id entifiable expander n et- work with th e r o uting matrix R r × n and a set o f pa ths R . Let G ( E , R , H ) be its co rr espond ing bipartite graph with th e bi- adjacen cy matrix R . Then, on e an d only o ne o f the fo llowing statements is true for an y two links l i and l j in E , i 6 = j : • deg ( l i ) > deg ( l j ) • deg ( l i ) < deg ( l j ) • deg ( l i ) = deg ( l j ) = d and 2 d − 4 deg ( l i , l j ) ≥ 0 where deg ( l i , l j ) is defined as the n umber of nodes con- nected to bo th l i and l j in the bip artite graph G . Equ iv alently , deg ( l i , l j ) den otes numb er of paths g oing th rough both l i and l j . C. k-identifiab ility For k -identifiab le networks, the per forman ce of l 1 optimiza- tion in terms of estimation error, depend s on the locatio n an d number of the con gested links. It th us does not seem f easible to p rovide strict deterministic counter parts to Theo rems 1, 2 for k -identifiability in general. Instead, we prove - using a probab ilistic appr oach - that the a verage estimation err or over the d istrib u tion of co ngested links (u p to k ) within the n etwork is u pper b ound ed, an d provid e a b ound in terms of the de lays of th e ( other) u nconge sted link s. T o do so, we fo llow a proced ure similar to k = 1 in Lemma 1, Theo rems 1, and 2. W e sh ow tha t when R is a bi-ad jacency m atrix of a (2 k , d, ǫ ) -expander graph w ith ǫ ≤ 1 / 4 , th e LP o ptimization in Eq. (8) can be used for recovery of d elay vector x . Similar to Eq. ( 9), we proo f that the expected estimation e rror is b ounded by average delay o f uncon gested lin ks in the n etwork. Here, we assume th at when a link is uncongested , it ha s a con stant small delay v alue. This is a fair assumption because the delay of the uncongested links is primar ily d ominated b y the pro pagation delay [3 8], which is co nstant. Fur thermore , for th e sake of simplicity , we also assume th at whe n a lin k is con gested it has a constan t (unkn own) large delay value. A k -sparse d elay vector x , contains up to k large entries and the rest are close to zero. W e d efine the random set S as the set of in dexes of the large entries in x . T hus, S ⊂ { 1 , 2 , . . . , n } , | S | ≤ k a nd S c = { 1 , 2 , . . . , n }\ S . In ne twork N ( V , E ) , random set S r epresents the congested links. A realization of S can be den oted as S = { i 1 , i 2 , ..., i j } , j ≤ k wher e x i 1 , x i 2 , ..., x i j are th e large values in vector x and the rest are close to zero. According ly , links l i 1 , l i 2 , . . . , l i j are congested. As we will see in the following the orem, the p erforma nce of using the optimization in Eq. (8) does not depend on the values of x i 1 , x i 2 , ..., x i j . Theorem 3. Let N ( V , E ) be a network with a set of pa ths R a nd a co rr espon ding r outing matrix R r × n . Suppose th at G ( E , R , H ) is a (2 k , d, ǫ ) -expander graph with bi-adja cency matrix R an d ǫ ≤ 1 4 . Assume that x is the unknown k - sparse delay vecto r of N ( V , E ) , y = Rx is the given e nd- to-end delay measurement, and x ′ is th e solutio n to th e LP optimization in Eq . (8) . Then , the expected estimation err or is bound ed as fo llows: E S [ k x S − x ′ S k 1 + k x S c − x ′ S c k 1 ] ≤ f ( ǫ ) E S [ k x S c k 1 ] , (11) wher e S ( | S | ≤ k ) is the set of co ngested links inside N ( V , E ) and the expectation is with respect to th e distribution o f S . Pr oof : see App endix. The pro bability d istribution of S can be very com plex in general. One can assum e the prior d istribution f or cong estion ev en ts and indep endency amon g th e links’ co ngestion events. T o mo nitor the network , howe ver, ther e is no need to k now the distribution of S in adv ance. If a netw o rk N ( V , E ) satisfies the k -identifiab ility condition (given in Definition 3), the n etwork operator o r the ISP owner can use th e LP o ptimization in Eq. (8) to recover the delay in the network using end-to- end monitorin g. W e define a k -identifiable expa nder network as fo llows: Definition 3. A k -id entifiable expander n etwork N ( V , E ) is a n etwork whose r outing matrix R r × n is the bi-adjac ency matrix of a b ipartite graph G ( X , Y , H ) c onsisting of d i - r egular subgraphs G i ( X i , Y , H i ) with the fo llowing pr operties • X = ∪ X i and X i ∩ X j = ∅ for i 6 = j • H = ∪ H i • d i 6 = d j for i 6 = j • G i ( X i , Y , H i ) is a (2 k , d i , ǫ ) -expander with ǫ ≤ 1 4 Theorem 3 ho lds for networks whose c orrespon ding b ipar- tite graphs are left regular . In following theorem we relax this con dition. W e show that for any k -iden tifiable expa nder network N ( V , E ) with a given routing matrix R , its k -spa rse delay vector x can be r ecovered from end-to-en d measuremen t y = Rx with LP optimization in Eq . (8). Theorem 4. Let N ( V , E ) be a k -id entifiable expander net- work with a set of path s R and a corr espo nding r ou ting matrix R r × n . Then th e k -spa rse dela y vector of N ( V , E ) is the solutio n to the LP optimization in Eq. (8) . Pr oof : see App endix. I V . E V A L U A T I O N R E S U LT S In Sectio n I II, T heorem 4, we showed that if the rou ting matrix of a network is the bi-ad jacency matrix of the unio n of disjoint expand er graphs ( k -identifiab le expander as defin ed in Definition 3), that n etwork is k -iden tifiable. Mo reover , we can estimate internal lin k delay using an LP op timizer in E q. 6 (8). Howe ver , a legitimate ’big -picture’ que stion arises: How many networks actually satisfy the condition s of Theorem 4; i.e., how many are k -identifiable expanders? In this section, we generate r andom In ternet-typ e networks to stu dy this question. Our simulation results sho w th at our relaxation increases number of n etworks which satisfy exp ansion pro perty by almost 30 %. For those n etworks that a re k -identifiable expand er–i.e., their routing matrix satisfies the c ondition in Definition 3– we deter mine the average normalized estimation error when there is k cong ested link in the network and show that the av e rage norm alized estimation err or remains within an acceptable ra nge. Next, we comp are l 1 optimization with new condition s with a r ecently d ev e loped delay tomo graph y algorithm and show that the LP optim ization un der the new propo sed co nditions yield s a lower estimation erro r . Finally , som e network mon itoring app lications ar e require d to locate congested links in a network. W e show that if the network is k -iden tifiable, the LP optimization algorithm can be employed as a congestion detection to ol that has a performan ce close to op timum detecto r . A. Gen eration of Networks with Ran dom T opology W e use Ine t versio n 3 .0 [ 39]–an In ternet top ology gen erator software at AS (Au tonomo us System) level– to g enerate random graph s with the given power law factor and a fixed number of bo undar y nodes. Boun dary nodes are no des with degree o ne which act as injection points f or p robes in network tomogr aphy p roblem. W e c reate networks conta ining 500 0 nodes with 12 , 16, 20, 25 and 30 bo undary nodes, respectively . The output of In et, whic h contains the set of neighbo rs of each n ode in the ge nerated gr aph, is f ed to matgrap h to olbox in MA TLAB [40] for mo dification. W e first create a rou ting matrix containin g th e shortest paths between any boun dary node p airs in the network. T hen we d elete all node s and link s that d o no t con tribute to any o f the above path s, since if a lin k is not covered by any end- to-end path , it is n ot identifiable. The remainin g networks constitute our rand om set. In Figur e 4-(a), an example of random network is depicted. It is worth pointing o ut tha t in Intern et topolog y-based net- works, a r elationship exists between the numb er of b ound ary nodes (num ber of nodes with degre e on e) and the n umber of links in a n etwork (often referred to as the network size) [41]. The liter ature shows that the degree of node s in Internet topolog y has a power law distrib utio n. The majority of Internet topolog y gener ator softwares, inclu ding Inet 3.0 , consider the number o f b ound ary nodes as an input argument [39]. In Figure 4-(b ) Statistics of number of links within a network with fix n umber of bou ndary n odes is d epicted. Clearly , size of the networks (num ber of link s in the networks) grows with the num ber of bound ary no des. M oreover , In Figure 4-(b ) presents the average n umber of paths in the network s that are av ailable for de lay r ecovery . As expected , num ber of p aths in the network is less than numb er of lin ks. B. Networks a nd Expa nsion Pr op erty For the rou ting matr ices of these rand om networks, we first exam ine h ow m any of them satisfy th e k - identifiability T ABL E I F O R N E T W O R K S W I T H A FI X E D N U M B E R O F B O U N D A R Y N O D E S , H O W M A N Y A R E k - I D E N T I FI A B L E E X PA N D E R S F O R k = 1 , 2 , 3 W I T H ǫ ≤ 1 4 A N D ǫ < 1 6 12 16 20 25 30 k = 1 ǫ ≤ 1 4 72% 74% 72% 70% 72% ǫ < 1 6 40% 32% 30% 36% 32% k = 2 ǫ ≤ 1 4 56% 50% 50% 54% 52% ǫ < 1 6 20% 24% 22% 22% 26% k = 3 ǫ ≤ 1 4 56% 50% 46% 52% 52% ǫ < 1 6 0% 0% 22% 20% 24% expansion condition s in Definition 3. For the network with a fixed number of b ound ary no des, fifty different topo logies are created. T able I shows the percen tage of networks th at satisfy the k - identifiability pr operty f or k = 1 , 2 , 3 . T o show the imp act of ou r relaxation of ǫ in Lem ma 1 and Theorem 4, in T ab le I, we also provid e the percen tage of networks th at are k - identifiable, using ǫ < 1 / 6 . As o ne can see, by m oving the bou nd on ǫ fro m 1 / 6 to 1 / 4 , the numb er of networks satisfying the e x pansion property increases by almost 30%. In other word s, 30% of k -identifiable expand er networks are within 1 / 6 ≤ ǫ ≤ 1 / 4 . C. Delay Estimatio n: Simula tion Experiments Theorem 4 says th at if the r outing m atrix of a n etwork satisfies k - identifiable expande r con ditions, then lin k delay s in the network can be estimated using Eq . (8) with boun ded estimation err or . T o examine the accuracy of the propo sed delay estimation metho d, for each n etwork cr eated in Section IV -A, we calcu late the average no rmalized estimation erro r for all link s as follows. When a link is unconge sted, it experiences fixed delay value sampled fr om expon entially distributed delays with average µ , i.e., f l ( t ) = 1 µ exp ( − t µ ) ∀ l ∈ E , (12) where f l ( t ) is th e delay for link l and µ ∈ [0 , 1] to de note that these lin ks do not u ndergo congestion . T o mo del cong estion ev en ts, k r eference link s are ran domly selected an d assigned a d elay o f 10 ms to denote congestion . W e exp loit th e L P optimizatio n in Eq . (8) to estimate link delays for k -identifiable expand er n etworks. For a network , the normalized estimation erro r for each congested link inside the network is calculated as follows: norm. er r = k x − ˆ x k 1 k x k 1 , (13) where x an d ˆ x are the tru e and estimated delay vecto rs respectively . Figure 5-(a) p resents th e av erage no rmalized estima tion error when there are k congested links inside th e network for k = 1 , 2 , 3 and LP o ptimization Eq. (8) is used to estimate the delay . As expected, the average normalized estimatio n error for different µ ( vector x is nearly k -sparse) mimics the expected trend fr om Eq. (11); i.e., as µ decr eases (the av e rage delay of uncon gested lin ks go es to z ero), so does th e recovery error of the LP algor ithm. This p henom ena also can be seen in Figure 7 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 ( a ) ( b ) Fig. 4. (a) Output of Inet after our m odificat ion in MA TLAB with 20 boundary nodes. Nodes with deg ree-1 are injectio n nodes. (b) Statistics of number of links within a netwo rk with fix number of boundary nodes. For each number of boundar y nodes, the central mark is the median, the edges of the box are the 25th and 75th percentile s, and upper/lo wer bars represent the extreme va lues observed. The filled circle s ho ws the ave rage number of paths used for delay reco very . 5-(b) wh ich presents th e estimation error u pper boun d. Fro m Eq. (9) a nd Eq. (1 1), the u pper boun d d epends only on delay values of uncon gested links and it go es to zer o f or an id eal network (i.e. zero delay for uncong ested lin ks). A notable point is that the size o f a network (i.e. , th e number of links inside the network) gr ows with the num ber of bound ary nod es. Theref ore, f or a fixed number of co ngested links, th e n umber of uncong ested link s an d th e value of k x S c k 1 increase as the numbe r of b oundar y n odes increases. The upp er bou nd of the deriv e d estimation e rror d epends u pon the summatio n of the d elay value of the uncon gested links. In other words, the upp er b ound , for fixed k , is implicitly an increasing fun ction of the numb er of bou ndary nodes. This explains the upward tren d in Figu re 5-(b) . T o ev alua te the algorithm f or large networks, we generate networks with 5 0 and 10 0 bound ary n odes by imp lementing the pro cess explained at the beginn ing of this section. For each number o f boun dary nodes, N = 50 and N = 1 00, 50 d ifferent network samples a re gener ated. The average numbers of lin ks in these samp les are aro und 300 an d 450 links, r espectively . Figure 6 presen ts th e average norm alized estimation err or for delay recovery in k - identifiable expander n etworks, using the LP algorith m, where k % of the links ar e co ngested. Th e process of assigning d elay to cong ested an d u ncong ested links is similar to the previous scenario . A notab le poin t is that for a fixed value of µ , th e value of k x k 1 increases as the numb er of cong ested links increases. Figure 6 shows that the estimation error does n ot increase as fast as the value o f k x k 1 . Hence, for a fixed µ v a lue, therefor e, the norma lized estimatio n error exhibits a decreasing trend as the n umber of congested link s in creases; the tren d occurs as the number of cong ested lin ks satisfied the sp arsity condition k ≪ | E | . For the same re ason, for a fixed µ , the normalized estimation erro r fo r a large network, N = 100 , is slightly lower than the no rmalized estimation erro r with N = 50 b ound ary no des. Finally , we e valuate the LP a pproach as applied to a detection (binary hypothesis testing) problem for k -id entifiable Fig. 6. A ve rage normalize d estimati on error in large networks with N = 50 and N = 100 boundary nodes. Networks satisfy conditions gi ven in Definitio n 3 and k % of the links are deficient. expander n etworks. W e stud y the effectiv eness of LP opti- mization in classifying links as cong ested an d uncong ested for k - identifiable n etworks. T o th is en d, we co mpare th e delay caused by each link with a threshold. Links with delay s greater than the threshold are c ategorized as congested, and vice versa. That is, we con sider the simple detection rule: ∀ l ∈ E , if x l ≥ τ ⇒ l is con gested (14) Figure 7 p resents the receiver op erating ch aracteristic (R OC) for the above-mention ed detection ru le, wh ere τ ch anges fr om 0 → ∞ . For µ = 1 , the R OC p lot is very close to that o f the ideal r eceiv er , ind icating that the LP op timization in Eq . (8) can distinguish between co ngested and uncon gested links. An interesting o bservation from Figure 7 is that d etection perfor mance de pends only on the de lay value o f un congested links an d is independ ent of network size, number of congested links k , and delay v alue of co ngested links as lo ng as k satisfies the spar sity co ndition, i.e., k ≪ | E | . 8 0 2 4 6 8 10 12 14 16 12 16 20 25 30 A ve. Normalized Error (%) Number of Boundary Nodes k=3 k=2 k=1 ραͳ ραǤʹ ραǤͲͷ ραͳ ραǤʹ ραǤͲͷ ραͳ ραǤʹ ραǤͲͷ 0 2 4 6 8 10 12 14 16 18 20 12 16 20 25 30 Estimation Error Number of Boundary Nodes k=3, µ = .05 (bound) k=1, µ = .05 (bound) k=3, µ = .05 k=1, µ = .05 k=3, µ = .2 (bound) k=1, µ = .2 (bound) k=3, µ = .2 k=1, µ = .2 ( a ) ( b ) Fig. 5. (a) A verage normalize d estimation error in networks satisfyi ng condition s gi ven in Definition 3 when there are k deficient link within the netw ork for differe nt va lues of µ in Eq. (12). (b) Comparing the simulation estimati on error and the deri ved theoretica l error upper bound. Fig. 7. Recei ver Operating Characterist ic for the k -identifiable expande r netw orks. When a link is unconge sted, it exp erienc es fixed delay v alue sampled from exponent ially distribute d delays giv en in Eq. (12). T o model congesti on ev ents, k reference links are randomly select ed and assigned a delay of 10 ms. D. Dela y E stimation: Cumula tive Distribution Fun ction In this section, we compar e ou r results with th ose produce d by CF-estimator, one of th e recent a nd state-of -the-art network delay estimators prop osed in [28]. In the study , the autho rs propo sed a m ixture mo del of characteristic f unctions f or d elay matrix x and dev eloped a fast e stimation algorith m based o n generalized meth od of mo ments ( GMM). The authors claim that this a pproach enables th e use of more flexible models of h eterogen eous network link delay s, wher ein th e delay s are n on-discrete a nd may hav e different scales across all network links. W e pr ovide the cu mulative pro bability o f the normalized estimatio n er ror using both meth ods and show that LP o ptimization unde r the new pr oposed cond itions achieves a lower er ror cum ulativ e distribution. Let x be the actual delay of the lin ks and ˆ x be the o utput of th e delay estimator . Then we estimate emp irically th e following CDF: P ( k x − ˆ x k 1 k x k 1 ≤ δ ) . (15) Figure 8 presents the CDF of the no rmalized estimation error when there are k con gested links insid e the network for k = 1 , 3 and δ ∈ [0 , . 5 ] . For each CDF , 20 0 ra ndom networks are g enerated and for each gen erated network , link delays are assigned as described in Section IV -C with µ ∈ { 0 , . 1 , . 2 , 1 } . As can be seen , for k -iden tifiable n etworks, the L P algorithm outperf orms CF algo rithm, since it uses available sparsity as its side inf ormation . V . C O N C L U S I O N In this work, we investigated th e application of expander graphs and compressed sensing to network tomog raphy . As shown b y exam ples and simulation evidence, the cu rrent r e- sults on expand er graphs do not app ly to mo st of the n etworks. Hence, we mod ify some of the results to be mor e suitab le for the delay estimation pr oblem. W e show that th e numb er of Inter net-topo logy-b ased n etworks satisfying new cond itions is increa sed by 30%. For th ose networks, we co mpare delay estimation based on co mpressed sensin g with a state-o f-the-art delay estimation algo rithm. The results show that compressed sensing provides better estimation, i.e., lower CDF of estima- tion error . Previous work has sho wn that in networks with large node degrees, r ecovery is typically better . Our work sup ports this since n etworks with large nod e degrees h av e smaller ǫ for their corr esponding expand er g raphs, r esulting in smaller estimation er ror via l 1 -optimizatio n. R E F E R E N C E S [1] B. E riksson, G. Dasarathy , P . Barford, and R. Now ak, “T oward the practi cal use of netwo rk tomography for Internet topology discov ery , ” in Proc. IEEE Interna tional Confer ence on Compute r Communicatio ns (INFOCOM) , 2010, pp. 1–9. [2] M. H. Firooz, K. Ronasi, M. R. Pakrav an, and A. N. A vana ki, “ A multi-send er multicast algorithm for media streaming on peer-to-p eer netw orks, ” Computer Communications Jou r nal , vol. 30, no. 10, pp. 2191–2200, 2007. [3] Y . V ardi, “Network tomography: Estimating source-destina tion traf fic in- tensiti es from link data, ” Journal of the American Stati stical Ass ociati on , vol. 91, no. 433, 1996. [4] E . Lawrence, G. Michailid is, and V . Nair , “Network delay tomography using flexica s t expe riments, ” Journal of the Royal Statisti cal Society: Series B (Stati s tical Methodol ogy) , vol. 68, no. 5, pp. 785–813, 2006. [5] B. Y u, J. Cao, D. Davis, and S. V ander-W iel, “Time-v arying networ k tomography: router link data, ” in Pro c. IEEE Internatio nal symposium on information theory , 2000, p. 79. [6] E . L awren ce, G. Michailidi s, V . Nair , and B. X i, “Netw ork tomograph y: a revie w and recent dev elopments, ” Ann A rbor , vol. 1001, 2006. [7] S. W . Richar d, “TCP/IP illustrated, ” Addison-W elsey Publishing Com- pany , 1994. [8] Y . Bejerano and R. Rastogi, “Robust monitoring of link delays and faults in IP netwo rks, ” in T wenty-Se cond A nnual J oint Confer ence of the IEEE Computer and Communicati ons Societie s (INFOCOM) , vol. 1, 2003, pp. 134–144. [9] ——, “Robust monitoring of link delays and faul ts in IP networks, ” IEEE/ACM T rans. Networkin g , vol. 14, no. 5, p. 1103, 2006. [10] K. Ronasi, M. H. Firooz, M. R. Pakra van, and A. N. A v anaki, “ An enhanc ed random-walk method for conten t locating in p2p networks, ” in Pro c of Interna tional Confer ence on Distribu ted Computing Systems W orkshops , 2007, pp. 21–21. 9 ( a ) ( c ) Fig. 8. Cumulati ve distributi on function of estimati on error for (a) k = 1 (b) k = 3 . For k -identi fiable expa nder networks (Definition 3), the LP algorithm outperfor ms CF method. [11] R. Caceres, N. Duffiel d, J. Horo witz, and D. T owsle y , “Multicast - based inferenc e of network-in ternal loss characteri stics, ” IEEE Tr ans. Informatio n theory , vol. 45, no. 7, pp. 2462–2480 , 1999. [12] Y . Tsang, M. Coat es, and R. Now ak, “Passi ve network tomograph y using em algorit hms , ” in Proc . IEEE Int. Conf . Acoustic s, Speec h, and Signal Pr ocessing(ICASSP) , vol . 3, 2001, pp. 1469–1472. [13] T . Bu, N. Duffiel d, F . Presti, and D. T o wsley , “Network tomography on general topolo gies, ” in ACM SIGMETRICS P erformance Evaluat ion Revie w , vol. 30, no. 1, 2002, pp. 21–30. [14] M. Rabbat, R. Nowa k, and M. Coates, “Mul tiple source, multip le desti- nation network tomography , ” in Proc . IEEE International Confer ence on Computer Communications (INFOCOM) , vol. 3, 2004, pp. 1628–1639. [15] M. Firooz and S. Roy , “Network tomography via compressed sensing, ” in Pr oc. IEEE Global T elecommunicat ions Confer ence , Dec 2010, pp. 1–5. [16] A. Coates, A. H ero III, R. Nowak , and B. Y u, “Interne t tomography , ” IEEE Signal pr ocessing magazi ne , vol. 19, no. 3, pp. 47–65, 2002. [17] R. Castro, M. Coates, G. Liang, R. No wak, and B. Y u, “Network tomography: Recent de velopments, ” Statistic al Science , vol. 19, no. 3, pp. 499–517, 2004. [18] Y . Xia and D. Tse, “Inference of link delay in communication networks, ” IEEE J . Selecte d A re as in Communicati ons , vol. 24, no. 12, pp. 2235– 2248, 2006. [19] S. Jafarpour , W . Xu, B. Ha ssibi, and R. Calder bank, “Efficien t and robust compressed sensing using optimized e xpander graphs, ” IEEE T rans. Informatio n theory , vol. 55, no. 9, pp. 4299–4308 , 2009. [20] E. Cand ` es, “Compressi ve sampling, ” in Proc of the Internati onal Congr ess of Mathe maticians , vol. 3, 2006, pp. 1433–1452. [21] D. Donoho, “Compressed sensing, ” IEEE T rans. Information theory , vol. 52, no. 4, pp. 1289–1306 , 2006. [22] M. Coates, Y . Pointurie r , and M. Rabbat, “Compressed network moni- toring, ” in Pr oc. IEE E W orkshop on Statistical Signal Pro cessing , 2007, pp. 418–422. [23] W . Xu, E. Mallada, and A. T ang, “Compressiv e sensing over graphs, ” in Proc. IEEE Interna tional Confer ence on Computer Communications (INFOCOM) , 2011, pp. 2087–2095. [24] M. W ang, W . Xu, E. Mallada, and A. T ang, “Sparse recov ery with graph constrai nts: Fundamental limits and measurement construction , ” A rxiv pre print arXiv:1108.0443 , 2011. [25] M. Fa loutsos, P . Faloutsos, and C. Falout s os, “On po wer-l aw rela- tionships of the internet topology , ” in ACM SIGCOMM Computer Communicat ion Revie w , vol. 29, no. 4, 1999, pp. 251–262. [26] M. Naji minaini, L. Subedi, and L. T rajkovi c, “ Analysis of internet topologi es: a historical vie w, ” in Proc . IEEE International Symposium on Circuit s and Systems , 2009, pp. 1697–1700 . [27] R. Berinde and P . Indyk, “Sparse recove ry using sparse random matri- ces, ” preprint , 2008. [28] A. Chen, J. Cao, and T . Bu, “Netwo rk tomography: Identifiabil ity and fourier domain estimation, ” IEEE T rans. on Signal Pr ocessing , vol. 58, no. 12, pp. 6029–6039, 2010. [29] ——, “Netw ork tomography: Identifiabi lity and fourier domain estima- tion, ” in Proc. IEEE Interna tional Confer ence on Computer Communi- cations (INFOCOM) , 2007, pp. 1875–1883. [30] J. Clark and D. Holton, A first look at graph theory . W orld Scient ific Publishing Company , 1991. [31] E. Cand ` es, J. Romber g, and T . T ao, “Rob ust uncertainty principles: Exact signal reconstruction from highly incomplete frequenc y information, ” IEEE T rans. Informat ion theory , vol. 52, no. 2, pp. 489–529, 2006. [32] M. W akin, “ An introduct ion to compressi ve sampling, ” IEEE signal pr ocessing magazi ne , vol. 25, no. 2, pp. 21–30, 2008. [33] A. Gilbert, M. Strauss, J. Trop p, and R. V ershynin, “One s ket ch for all: fa st algorithms for compressed sensing, ” in Pr oc. the annual ACM symposium on theory of computin g , 2007, pp. 237–246. [34] E. Candes and T . T ao, “Near-o ptimal signal recov ery from random project ions: Unive rsal encoding strategie s?” IEEE T rans. Information theory , vol. 52, no. 12, pp. 5406–5425, 2006. [35] W . Xu and B. Hassibi, “Effici ent compressiv e sensing with determini s tic guarant ees using expander graphs, ” in IEEE information theory work- shop , 2007, pp. 414–419. [36] P . S arnak, “What is an expan der?” American Mathematica l Societ y . , vol. 51, pp. 762–770, 2004. [37] R. Berinde, A. Gilbert, P . Indyk, H. Karlof f, and M. Strauss, “Combining geometry and combi natoric s: A unified approac h to sparse signal recov- ery , ” in P r oc. A nnual A llerton confer ence on communicati on, contr ol, and computing , 2008, pp. 798–805. [38] C. Bovy , H. Mertodimedjo, G. Hooghiemstra , H. Uijterwaa l, and P . V an Mieg hem, “ Analysis of end-to-end delay measurements in in- ternet , ” in P r oc. the P assive and Active Measure ment W orkshop , 2002. [39] J. W inick and S. Jamin, “Inet-3.0: Internet topology generat or, ” 2002. [40] E. Sheinerman, “MA TGRAPH: A matlab toolbox for graph theory , ” Softwar e availabl e at: http://www . ams. jhu. edu/˜ ers/ matgrap h , 2007. [41] Y . Chen, D. Bindel, and R. H. Katz, “T omography-based overl ay netw ork monitori ng, ” in Pr oc. A CM SIGCOMM confer ence on Internet measur ement , 2003, pp. 216–231. [42] M. Capa lbo, O. Reingold , S. V adhan, and A. Wi gderson, “Ran domness conduct ors and constant- degre e lossless expanders, ” in Pr oc. Annual ACM symposiu m on theory of computing , 2002, pp. 659–668. A P P E N D I X A P R O O F S O F T H E O R E M S W e use the fo llowing convention to in dicate the end of the pro ofs f or theo rems an d lemm as. For main theore ms an d lemmas in the bo dy of the manuscrip t, the end o f the pr oof is d enoted by ; for preliminar y lemmas that ar e nee ded to prove the main theo rems, end of the proof is de noted by . Proof o f Lem ma 1: to prove this lemma, we first n eed the following result which c haracterizes the nu ll space of bi- adjacency matrix o f an expan der graph ; it will be used to bound th e err or in the re covery of x fr om its compre ssed projection y . Lemma 2. Let G ( X , Y , H ) be a (2 , d, ǫ ) -expander with ǫ ≤ 1 / 4 an d A m × n be its b i-adjacen cy matrix. Assume w lies in the null spa ce of A (i.e., Aw = 0 ) and let S b e any sing leton 10 set of coordinates of the w , i.e., S = { i } , i ∈ { 1 , ..., n } , r epresenting the sing le larg e e ntry . Then , k w S k 1 ≤ 2 ǫ k w S c k 1 . (16) Pr oof : let A ′ be the submatr ix o f A contain ing rows f rom N ( S ) . Since | S | = 1 an d graph is left d -regular , k A ′ w S k 1 = k Aw S k 1 = d k w S k 1 . W e have 0 = k A ′ w k 1 = k A ′ w S + A ′ w S c k 1 (17) ≥ k A ′ w S k 1 − k A ′ w S c k 1 = d k w S k 1 − k A ′ w S c k 1 . Each set of two no des on the left has at least 2(1 − ǫ ) d neighbo r nod es on the righ t (via expansion) . Since each n ode on the left h as degree d , numb er o f common nodes on the right-ha nd side is at most 2 d − 2 (1 − ǫ ) d = 2 ǫ d . That m eans each colu mn of A ′ (except the one correspo nding to S ) h as at m ost 2 ǫd nu mber of one s, yieldin g, k A ′ w S c k 1 ≤ 2 ǫd k w S c k 1 . (18) Therefo re, we have k w S k 1 ≤ 2 ǫ k w S c k 1 , or equiv a lently k w S k 1 ≤ 2 ǫ 1 + 2 ǫ k w k 1 . (19) Consider x ′ , x ∈ N ( A ) , and let y = x ′ − x . Clear ly y ∈ N ( A ) and we have: k x k 1 ≥ k x ′ k 1 (20) = k x S + y S k 1 + k x S c + y S c k 1 ≥ k x S k 1 − k y S k 1 + k y S c k 1 − k x S c k 1 = k x k 1 − 2 k x S c k 1 + k y k 1 − 2 k y S k 1 ≥ k x k 1 − 2 k x S c k 1 +(1 − 4 ǫ 1 + 2 ǫ ) k y k 1 , where in th e last equ ality , Eq. (19) is used. Ther efore we have: k x ′ − x k 1 = k y k 1 ≤ 2(1 + 2 ǫ ) 1 − 2 ǫ k x S c k 1 . (21) Proof o f Theo r em 1: with Lem ma 1 in place, Theorem 1 readily follo ws. Let x ′ be the solution to the o ptimization prob- lem in Eq. (8). Th at means Rx ′ = R x and k x ′ k 1 ≤k x k 1 . On the other h and, G is a (2 , d, ǫ ) -expan der graph with the bi-adjacen cy m atrix R . Consequ ently , E q. (6) ho lds for x a nd x ′ , and Theo rem 1 is proved. Proof of Theorem 2: we p rove the theor em f or the case in which G ( X , Y , H ) has only two expander subgraph s, since the gener al case fo llows using similar argument. Let G 1 ( X 1 , Y , H 1 ) with | X 1 | = m , and G 2 ( X 2 , Y , H 2 ) with | X 2 | = n − m , be two d i -regular ( d 1 6 = d 2 ) subgraph s o f G ( X, Y , H ) with bi-ad jacency matrices R 1 and R 2 , re spec- ti vely . Wit hout loss of gener ality , we r ename the elements in X such th at R = [ R 1 R 2 ] . Now , suppose two 1 -spa rse vectors u and v have the same projection for matrix R r × n , i.e., Ru = Rv . Without lo ss of g enerality , we assume k u k 1 ≥k v k 1 . Let w = v − u . Clearly , w belong s to the null space of R . Mor eover , p artition u = [ u t 1 u t 2 ] t , v = [ v t 1 v t 2 ] t and w = [ w t 1 w t 2 ] t . Then, w 1 = v 1 − u 1 , w 2 = v 2 − u 2 . (22) Let S ⊂ { 1 , 2 , . . . , n } b e any singleto n set of c oordin ates ( k = 1 ) of w and R ′ is the submatr ix of R cor respondin g to rows f rom N ( S ) . W e co nsider the following two cases: Case 1 : S ⊂ { 1 , 2 , . . . , m } : In this case S represents a node in G 1 ( X 1 , Y , H 1 ) which , by assumption, is a (2 , d 1 , ǫ ) -expand er . Similar to the pr oof of Lemma 1, k R ′ w S k 1 = k Rw S k 1 = d 1 k w S k 1 . Thus, 0 = k R ′ w k 1 = k R ′ w S + R ′ w S c k 1 (23) ≥ d 1 k w S k 1 − k R ′ w S c k 1 . Let r t i denote th e i - th r ow of R ′ . The bipartite gr aph G 1 is left d 1 -regular an d hen ce m atrix R ′ has d 1 rows. Th erefore, we d erive an upper b ound o n k R ′ w S c k 1 as b elow k R ′ w S c k 1 = d 1 X i =1 | r t i w S c | (24) (1) ≤ d 1 X i =1 n X j =1 r ij | ( w S c ) j | = m X j =1 | ( w S c ) j | d 1 X i =1 r ij + n X j = m +1 | ( w S c ) j | d 1 X i =1 r ij , where for inequality in the 1st step, we used the tr iangular inequality and the fact that r ij ∈ { 0 , 1 } . Since G 1 ( X 1 , Y , H 1 ) is a (2 , d 1 , ǫ ) -expand er , any two nodes o n the left have at most 2 ǫd 1 neighbo rs on the right in common. Th at means, each column in R ′ has at m ost 2 ǫd 1 nonzer o en tries (i.e., P d 1 i =1 r ij ≤ 2 ǫd 1 ) for any j ∈ { 1 , 2 , . . . , m }\ S . On the other hand, beca use R ′ has d 1 rows, P d 1 i =1 r ij ≤ d 1 for each j ∈ { m + 1 , . . . , n } . Alon g with Eq. (24), it re sults in: k R ′ w S c k 1 ≤ 2 ǫd 1 m X j =1 | ( w S c ) j | + d 1 n X j = m +1 | ( w S c ) j | = 2 ǫd 1 k w 1 S c k 1 + d 1 k w 2 k . After substituting above in Eq. (23) and rearrang ing the inequality , we have: k w S k 1 ≤ 2 ǫ k w 1 S c k 1 + k w 2 k 1 , (25) which c an be rewritten as: k w S k 1 ≤ 2 ǫ 1 + 2 ǫ k w 1 k 1 + 1 1 + 2 ǫ k w 2 k 1 . (26) By assumption, k u k 1 ≥k v k 1 . This further yields the following lower bound on u : k u k 1 ≥k v k 1 = k u 1 + w 1 k 1 + k u 2 + w 2 k 1 (27) = k u 1 S + w 1 S k 1 + k u 1 S c + w 1 S c k 1 + k u 2 + w 2 k 1 ≥ k u 1 S k 1 − ( k u 1 S c k 1 + k u 2 k 1 ) + ( k w 1 S c k 1 + k w 2 k 1 ) − k w 1 S k 1 11 Because S ⊂ { 1 , . . . , m } , we have k w 2 k 1 + k w 1 S c k 1 = k w S c k 1 , k u 2 k 1 + k u 1 S c k 1 = k u S c k 1 , and k w S k 1 = k w 1 S k 1 . So Eq. (27) can be simplified as below: 2 k u S c k 1 ≥ k w S c k 1 − k w S k 1 (28) = k w k 1 − 2 k w S k 1 . By u sing Eq . (2 6) we have: 2 k u S c k 1 ≥ 1 − 2 ǫ 1 + 2 ǫ k w 1 k 1 − 1 − 2 ǫ 1 + 2 ǫ k w 2 k 1 . (29) By E q. (2 2) and triang ular inequ ality we have: k w 2 k 1 ≤k u 2 k 1 + k v 2 k 1 . (30) Applying above in equality to Eq. (29) we have: 1 + 2 ǫ 1 − 2 ǫ 2 k u S c k 1 + 2 − 4 ǫ 1 + 2 ǫ k u 2 k 1 + k v 2 k 1 ≥k w k 1 , ( 31) where we u se the fact th at k w k 1 = k w 1 k 1 + k w 2 k 1 . Clearly , k u S c k 1 ≥k u 2 k 1 and k v S c k 1 ≥k v 2 k 1 . Therefo re, the following ine qualities ho ld: 4 1 − 2 ǫ k u S c k 1 +2 k v S c k 1 ≥k w k 1 . (32) Now let j ∈ S c . There is a path p ∗ which goes through either the link j o r the link in S b u t not bo th ( since it is a logical network). Let r t p ∗ be the co rrespond ing row for p ∗ in the routing matrix R . Since Ru = Rv , we h av e r t p ∗ u = r t p ∗ v . If p ∗ only g oes throu gh link j (and th erefore not the link in S ), the co rrespon ding entry of th e link in S in r t p ∗ is zer o. Hence we have k u S c k 1 ≥ r t p ∗ u . Ther efore, we can h av e th e following upper b ound f or every entry of v j ∀ j ∈ S c k u S c k 1 ≥ v j ∀ j ∈ S c . (33) Now , let assume th at the p ∗ goes th roug h the link in S . By assumption k u k 1 ≥k v k 1 . Therefo re, k u k 1 − r t p ∗ u ≥k v k 1 − r t p ∗ v . (34) Since p ∗ does n ot go th rough the link j we have k v k 1 − r t p ∗ v ≥ v j . On the othe r hand , because p ∗ goes through the link S , its en try in k u k 1 − r t p ∗ u is zero. Ther efore, k u S c k 1 ≥k u k 1 − r t p ∗ u an d k u S c k 1 ≥ v j . In summary , we always have k u S c k 1 ≥ v j ∀ j . By adding up b oth side o f the inequ ality for all j ∈ S c we h ave: | S c | k u S c k 1 ≥k v S c k 1 . (35) Clearly n = | X | > | S c | . Th erefore, the fo llowing up per bound is valid fo r w : ( 4 1 − 2 ǫ + 2 n ) k u S c k 1 ≥k w k 1 . (36) Case 2 : S ⊂ { m + 1 , m + 2 , . . . , n } : By th e same argum ent as Case 1, we have: 0 = k R ′ w k 1 ≥ d 2 k w S k 1 − k R ′ w S c k 1 . ( 37) As in case 1, we can pu t an upper boun d on k R ′ w S c k 1 as fo llows k R ′ w S c k 1 ≤ d 2 m X j =1 | ( w S c ) j | + 2 ǫd 2 n X j = m +1 | ( w S c ) j | ≤ d 2 k w 1 k 1 +2 ǫd 2 k w 2 S c k 1 . Using ab ove inequ ality an d Eq . (3 7), we have the following upper b ound for k w S k 1 . k w S k 1 ≤ 2 ǫ k w 2 S c k 1 + k w 1 k 1 , (38) Finally , the following prop erty is derived fo r vector w ∈ N ( R ) : k w S k 1 ≤ 2 ǫ 1 + 2 ǫ k w 2 k 1 + 1 1 + 2 ǫ k w 1 k . (39) By th e same argum ent as case 1 we have: ( 4 1 − 2 ǫ + 2 n ) k u S c k 1 ≥k w k 1 . (40) T o pr ove Eq. (9) for Th eorem 2, o ne can use ab ove equation and follow the same argumen t as given in pro ofs of Lemma 1 and Theo rem 1. Proof of Theorem 3: to prove this theor em, we first prove Lemma 3 which char acterizes the null space of R . Lemma 3. Assume tha t R r × n is a bi-a djacency matrix of a (2 k , d, ǫ ) - expander graph. Let w lie in the null spa ce of R r × n (i.e., Rw = 0 ) an d let S be any set o f coo r dina tes of w with | S | ≤ k , S ⊂ { 1 , ..., n } . Then , E S [ k w S k 1 ] ≤ 2 ǫ E S [ k w S c k 1 ] , (41) wher e the expectation is taken over the selection o f S . Pr oof : in this lemma, we aim to show that for a vector w in null space R , if we random ly select entries of w (up to k entries), l 1 -norm of tho se entries is smaller , o n average, than l 1 -norm o f the rest of the vector . W ithou t loss of gener ality , we label the n link s inside the network l 1 , l 2 , . . . , l n where the delay o f link l j is the j th entry in delay vector x . First, let fix S = S . Tha t is, S is a realization of ra ndom set S . Let R ′ be the sub matrix of R that contains rows fro m N ( S ) . By defin ition of w S , we have k Rw S k 1 = k R ′ w S k 1 . Thus, 0 = k R ′ w k 1 = k R ′ w S + R ′ w S c k 1 (42) ≥ k R ′ w S k 1 − k R ′ w S c k 1 . First, we im pose a lower bo und on k R ′ w S k 1 . By using the result from Le mma 1 in [ 27], we d riv e the fo llowing inequality: k R ′ w S k 1 ≥ d (1 − 2 ǫ ) k w S k 1 . (43) Substituting the ab ove eq uation into Eq. (42) y ields: k R ′ w S c k 1 ≥ d (1 − 2 ǫ ) k w S k 1 . (44) Equality ( 44) is valid for e very samp le S of ra ndom set S . By tak ing the expe ctation over all possible outcom es of S , which is also taken over all p ossible combinatio ns of congested links, we have E S [ k R ′ w S c k 1 ] ≥ d (1 − 2 ǫ ) E S [ k w S k 1 ] . (45) 12 , R = 1 1 0 0 0 1 1 0 1 1 0 0 0 1 1 0 1 0 0 0 0 1 1 1 , R ′ = 1 1 0 0 0 1 1 0 1 1 0 0 0 1 1 0 1 0 Fig. 9. A realiza tion of random set S for S = { 1 , 2 } (congested links are l 1 and l 2 ) when n = 6 , r = 4 and d = 2 . For the giv en S we hav e N ( S ) = { P 1 , P 2 , P 3 } . Now , we aim to iden tify an upper bound for E S [ k R ′ w S c k 1 ] . Again , let fix S = S . For a path P , define a n indicator f unction I l ∈ P as fo llows: I l ∈ P = 1 , link l belon gs to path P ; 0 , O.W . . (46) The d -regularity assumption of the routing matrix R imp lies that the link l belo ngs to e xactly d paths. For a link l , therefor e, selecting a ran dom p ath P yields a p robability of d r for the ev en t that the path P passes throu gh l . Equ iv alently , P ( I l ∈ P = 1 ) = d r = E [ I l ∈ P ] . (47) Recall that R ′ is a subma trix of R that contain s rows from N ( S ) . Thu s, each row of R ′ is a vector re presentation of a path. Let r t P be the row of R ′ that correspon ds to path P . Therefo re, k R ′ w S c k 1 = X P ∈ N ( S ) r t P w S c (48) ≤ X P ∈ N ( S ) X j ∈ S c | w j | I l j ∈ P = X j ∈ S c | w j | X P ∈ N ( S ) I l j ∈ P ≤ n X j =1 | w j | X P ∈ N ( S ) I l j ∈ P . The above-men tioned ineq uality is valid for every realiza- tion of the S of random set S . By taking the expectation over all po ssible o utcomes of S , wh ich is a lso taken over all possible co mbination s of co ngested links, we have E S [ k R ′ w S c k 1 ] ≤ E S n X j =1 | w j | X P ∈ N ( S ) I l j ∈ P (49) = n X j =1 | w j | E S X P ∈ N ( S ) I l j ∈ P . Random set S p resents some rand om nodes on the left-ha nd side of the expand er g raph. These nodes are co nnected to set of n odes N ( S ) o n th e right-han d side. Thus, N ( S ) is also a rand om set that pre sents rando m node s on the righ t. In the network, N ( S ) represents rand om p aths. Theref ore, the last summation in Eq. (49) can be in terpreted as follows: fo r a giv en index j , how many p aths from the rando m paths N ( S ) is th e link l j connected to 2 . For any realization of S , we have | N ( S ) | ≤ k d . In add ition, I l j ∈ P are i.i.d random variables. Thus, fo r a g i ven index j , lin k l j is co nnected , on av erage, to k d 2 r number of nod es in N ( S ) . Therefo re, we can derive the following upper b ound: E S [ k R ′ w S c k 1 ] ≤ n X j =1 | w j | k d · d r = k d 2 r k w k 1 . (5 0) For ǫ > 0 , k ≪ n , r ≪ n , in a (2 k , d, ǫ ) -expa nder g raph with n numbe r of no des o n the left and r num ber of no des on the rig ht-hand side, the following inequ ality is proved [42]: 2 k d ǫ ≤ r. (51) Finally , the following u pper bou nd f or E [ k R ′ w S c k 1 ] is derived: E S [ k R ′ w S c k 1 ] ≤ dǫ 2 E S [ k w k 1 ] (52) = dǫ 2 E S [ k w S k 1 ] + dǫ 2 E S [ k w S c k 1 ] . Substituting Eq . (52) into Eq. (45) results in E S [ k w S k 1 ] ≤ ǫ (2 − 5 ǫ ) E S [ k w S c k ] . (53) Giv en that ǫ ≤ 1 4 , we h av e ǫ (2 − 5 ǫ ) ≤ 2 ǫ and therefor e, E S [ k w S k 1 ] ≤ 2 ǫ E S [ k w S c k 1 ] . (54) Inequa lity (54) is similar to Eq . (16), excep t for th e E S [ · ] . The r est of the proof is similar to tha t of Theorem 1 , in which k x − x ′ k 1 is sub stituted with E S [ k x − x ′ k 1 ] . Proof of Theorem 4: Eq . ( 11), the result o f Theorem 3, is similar to Eq. (9) in Th eorem 1 by taking expec tation over S ; i.e., E S [ · ] . T o prove T heorem 3, that is to relax th e d -regularity condition , o ne can follow th e exact same argumen t given in the p roof of Theo rem 2 an d take the expectation over S . Due to this similarity and fo r the sake of space saving, the pro of is om itted her e. 2 Recal l that we label the n links inside the network l 1 , . . . , l n where the delay of link l j is the j th entry in delay ve ctor x .
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment